Назад в библиотеку
Система пеленгации узкополосных источников излучения кв – диапазона с малой базой
Автор: Теплов В. Ю., Бочкарев В. В., Петрова И. Р.
Источник: Казанский государственный университет ул. Кремлевская д.18, Казань 420008, Россия
Режим доступа:
naukainform.kpi.ua
Аннотация
Аннотация – Рассмотрены методы измерения параметров узкополосных сигналов коротковолнового (КВ) –
диапазона в условиях загоризонтного распространения.
Рассматриваются вопросы построения антенной системы
разнесенного приема с малой базой и методики цифровой
обработки многомодового сигнала.
Введение
Возможность дальнего загоризонтного распространения радиоволн КВ – диапазона (1-30 МГц) обуславливается наличием ионизированных слоев в
термосфере Земли. Таким образом появляется возможность как чисто практического применения (передача информации на дальние и сверхдальние
расстояния), так и исследовательского использования радиоволн КВ – диапазона. Во втором случае
исследования различных динамических процессов в
термосфере Земли носят глобальный характер в
связи с тем, что зона обзора имеет размеры порядка
сотен и тысяч км. В качестве измерительных систем
в этих случаях используются как простейшие системы разнесенного приема, так и большие амплитудные матрицы и фазированные антенные решетки [1].
Недостатком классических методов формирования
пространственной апертуры является необходимость обеспечения больших размеров для базы антенной системы, что существенно удорожает приемную систему и делает невозможным ее использования в условиях пространственных ограничений (подвижные платформы) [2]. Дополнительные возможности по упрощению приемно-измерительного комплекса появляются при использовании при использовании не только разделения в пространстве, но и в частотной области [2, 3].
Основная часть
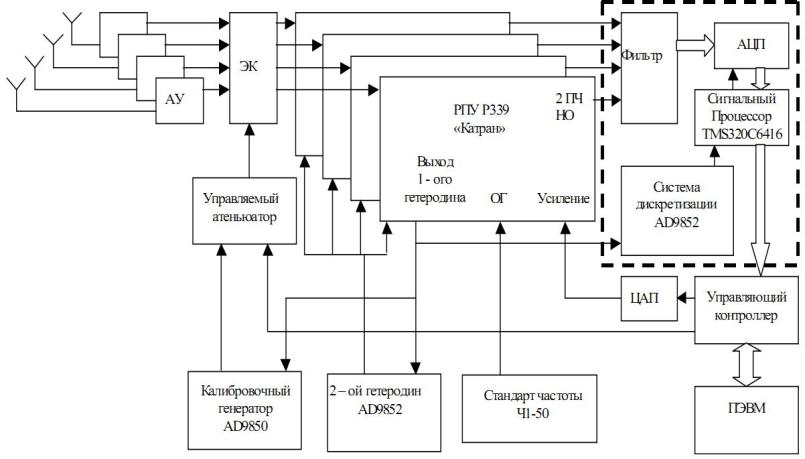
Рис. 1. Многоканальный измерительный стенд.
В Казанском государственном университете при
исследованиях динамических и волновых процессов
в ионосфере применяется пассивный доплеровский
фазоугломерный комплекс «Спектр». В качестве
зондирующих сигналов используются сигналы различных широковещательных АМ – станций и станции
точного времени (диапазон 1 – 20 МГц.). В большей части проведенных экспериментов применялась антенная система из 4 5 или 10 метровых вертикальных вибраторов. Главными ограничивающими факторами при измерении параметров многомодовых
сигналов наклонного зондирования ионосферы методом доплеровской интерферометрии являются
нестационарность сигнала и сложная поляризационная структура. Разделяемые по доплеровскому сдвигу частоты моды могут быть уверенно разделены
классическими методами спектрального анализа
только на соответствующих временных апертурах,
ограниченных в свою очередь временами стационарности ионосферных процессов. В зависимости от
рабочей частоты, различных условий распространения и методов определения времени стационарности
разные авторы указывают диапазон 40 – 300 сек [2, 5, 6, 7].
Проведенное численное моделирование работы
пеленгатора с малой базой и симметричной вертикальной антенной системой показало, что на среднеширотных трассах при достигнутом уровне аппаратурных погрешностей (неидентичность каналов разнесенного приема, нестабильность фазовых характеристик каналов и др.) среднеквадратичная ошибка измерения составляет для нашей установки 0.07° при измерении разности фаз. Это обуславливает «технический» предел углового разрешения. Согласно расчетам среднеквадратической ошибки определения углов, соответствующие этой величине минимальной
ошибки измерения фазы получено, что зависимость
от частоты радиосигнала – обратно- пропорциональная и для характерных значений углов прихода (угол места θ = 20°, азимут α соответствует направлению на
Москву ) имеет вид δα = 0.308/f, δθ = 1.09/f, где f –
частота в мегагерцах. В зависимости от азимута точность (при частоте 10 МГц и θ=20°) изменяется в пределах 0.075° – 0.12° для угла места и 0.028° – 0.034°
для азимута.
Дальнейшее ухудшение точности определения связано со сложностью интерференционной
картины (многомодовость, поляризация). Как показывает расчет, зависимость ошибки определения углов
σδα, σδθ от ошибки в определении фаз σ можно считать почти линейной вплоть до значений порядка σ ≈
3 – 4°. Для f = 10 МГц, θ = 20° σ в пределах 0.2 – 2° ошибки можно примерно оценить следующей линейной
аппроксимацией (все величины в градусах):
σδα = 0.44σ + 0.086, σδθ = 1.81σ - 0.19
При использовании вертикальных вибраторов
достаточно уверенно определяется азимутальный
угол. Сложности определения угла места вызваны
неудачной конфигурацией антенной системы (вертикальные вибраторы) по отношению к вертикальному
углу. Возникающие сложности можно устранить при
совмещении методов пространственно разнесенного
приема и спектрально поляризационного метода [8]
(на основе результатов численного моделирования
авторы статьи [2] показывают, что в этом случае
можно добиться точности определения углов порядка 1°, но только при условии надежного спектрального разделения мод).
Антенная система в этом случае строится из нескольких наклонных к уровню горизонта вибраторов,
сходящихся к общей центральной точке. Для уменьшения влияния неидентичности квадратурных каналов на определение углов прихода радиолуча нами
применена система многоканального цифрового
приема на основе цифрового сигнального процессора TMS320C6416 [9]. Спектральная обработка сигналов производится с использованием как классических, так и (в случае наличия значительной отраженной составляющей) параметрических методов [10].
Заключение
Таким образом разработанная и опробованная
система КВ – пеленгации позволяет сохранить возможности системы разнесенного приема с малой базой и использовать спектрально-поляризационные
методы. Использование современных систем цифровой обработки сигналов (высокоскоростные АЦП,
цифровой сигнальный процессор, системы цифрового
синтеза опорных частот) позволяет повысить надежность, стабильность параметров и точность системы
многоканального приема. Использование адаптивных
методов спектрального оценивания с повышенной
разрешающей способностью позволяет ослабить ограничения, вызванные нестационарностью измеряемого сигнала. Разработанные алгоритмы обработки
сигналов и антенная система позволяют более устойчиво решать задачу разделения мод и определения
углов прихода для многомодового узкополосного сигнала наклонного зондирования ионосферы.
Список использованной литературы
1. Афраймович Э. Л. Интерференционные методы радиозондирования ионосферы. М.: Наука. 1982. 198 с.
2. Э. Л. Афраймович, К. С. Паламарчук. Спектрально-поляризационный метод анализа интерференционной картины радиосигнала. Изв. ВУЗов Радиофизика, 253 с.
3. Егоров Н. Е., Нагорский П. М., Смирнов В. Ф. и др. Приемно-измерительный комплекс доплеровского наклонного зондирования ионосферы // Электронный журнал
«Исследовано в России», 76, 839-846, 2003.
4. Бочкарев В. В., Петрова И. Р., Теплов В. Ю. и др. Многоканальный измерительный фазоугломерный комплекс КВ -диапазона. // Сб. «Прием и обработка сигналов в сложных информационных системах».
Вып.21 Изд-во КГУ, 2004 г., с. 113-121.
5. Бочкарев В. В., Петрова И. Р., Теплов В. Ю. Учет нестационарности ионосферного сигнала в задачах пеленгации. // Сборник докладов Байкальской школы по фундаментальной физике, Иркутск, 2003г, с. 101-102.
6. Бочкарев В. В., Петрова И. Р., Теплов В. Ю. Стабиль-ность фазовых характеристик сигнала наклонного зон-дирования ионосферы. // Сборник докладов Байкаль-ской школы по фундаментальной физике, Иркутск,
2003 г, с. 108-109.
7. Барабашов Б. Г., Вертоградов Г. Г. Время стационар-ности ионосферного канала // Регион. 23 Конф. По рас-прост. Радиоволн. Санкт-Петербург, 28-29 окт., 1997г.:
Тез. докл.- СПб. 1997, c. 30.
8. Calvert W. et. al. //Radio Science, 1995. V.30. № 5. P.1577.
9. Цифровые радиоприемные системы // Под ред.
Жодзишского М. И., М.: «Радио и связь», 1990. – 208 с.
10. Плеухов А. Н., Бочкарев В. В., Петрова И. Р.,
Теплов В. Ю.. Спектральная обработка сигналов наклонного зондирования ионосферы с помощью параметрических методов // Изв. Вузов Радиофизика, 2000,
т. XL1, № 7, c. 607-616.