
Реферат по теме
«Исследование радиодальномера на основе j-корреляционной обработки сигналов»
Содержание
- Введение
- 1. Актуальность темы
- 2. Цель работы
- 3. Краткий обзор широко известных методов измерения дальности
- 3.1 Импульсный метод
- 3.2 Частотный метод
- 3.3 Фазовый метод
- 4. Описание схемы радиодальномера на основе J–корреляционной обработки сигнала
- Выводы
- Список источников
Введение
Радиолокацией называется совокупность методов и технических средств, предназначенных для обнаружения различных объектов в пространстве, измерения их координат и параметров движения посредством приема и анализа электромагнитных волн, излучаемых или переизлучаемых объектами.
Радиолокация как научно–техническое направление в радиотехнике зародилось 30–х годах. Достижения авиационной техники обусловили необходимость разработки новых средств обнаружения самолетов, обладающих высокими характеристиками (дальностью, точностью). Такими средствами оказались радиолокационные системы.
Выдающийся вклад в развитие радиолокации внесли русские ученые и инженеры П.К. Ощепков, М.М. Лобанов, Ю.К. Коровин, Б.К. Шембель. В советском союзе первые успешные эксперименты обнаружения самолетов с помощью радиолокационных устройств были проведены еще в 1934/36 гг. В 1939 г. на вооружение войск ПВО поступили первые серийные отечественные радиолокаторы. Существенным шагом в развитии радиолокации было создание в 1940/41 гг. под руководством Ю.Б. Кобзарева импульсного радиолокатора. В настоящее время радиолокация одна из наиболее прогрессирующих областей радиотехники.
Получение информации в радиолокации сопряжено с наблюдением некоторой области пространства. Технические средства, с помощью которых ведется радиолокационное наблюдение, называются радиолокационными станциями (РЛС), а наблюдаемые объекты – радиолокационными целями. Типичными целями являются самолеты, ракеты, корабли, наземные инженерные сооружения [5].
Основные требования к радиолокационным измерителям: высокая точность измерений; темп измерений должен соответствовать количеству одновременно наблюдаемых целей и их скоростям; принятый метод измерений должен удовлетворять требуемой разрешающей способности РЛС; метод измерений должен соответствовать применяемой системе обнаружения. Последнее требование облегчается тем, что оптимальная фильтрация и корреляционная обработка сигналов способствуют не только обнаружению слабых сигналов, но и повышению точности измерений. Все же некоторые различия имеются: чтобы совместить заданные вероятности правильного обнаружения и ложной тревоги, выбирают промежуточный порог обнаружения, тогда как наибольшая точность получается при фиксации пика оптимально обработанного сигнала [7].
Радиолокационные измерители классифицируются по следующим признакам:
- Непрерывное измерение текущих координат и скоростей целей, называемое сопровождением (слежением), может быть ручным (полуавтоматическим) или автоматическим. Измерители, применяемые для этого, классифицируются соответственно как неследящие или следящие.
- По числу каналов измерители разделяются на одноканальные и многоканальные.
- По измеряемой координате или параметру движения цели различают измерители дальности, азимута, угла места (высоты), радиальной и угловой скорости.
- По методу измерения – это амплитудный, частотный, фазовый, доплеровский и другие методы, в зависимости от того, какой параметр сигнала служит основой для измерений.
Рисунок 1 – Принцип действия импульсного радара
(анимация: 9 кадров, количество циклов повторения: бесконечно, 16 килобайт)
1. Актуальность темы
Корреляционные методы обработки получили широкое распространение в радиотехнических системах, однако, в радиолокационных станциях применение этих методов ограничено. Прежде всего, это связано с неблагоприятным эффектом Доплера на корреляционную функцию, т. к. в этом случае максимум корреляционной функции R(z) при z=0 уменьшается и изменяется ход корреляционной функции. Поэтому локация движущихся целей с помощью корреляционной пеленгации сильно затруднена [6].
J–корреляционный способ измерения дальности был впервые разработан доцентом кафедры «Радиотехники и защиты информации» Донецкого национального технического университета, профессором Сорочаном Анатолием Григориевичем.
2. Цель работы
Целью данной работы является статистический анализ радиодальномера на основе J–корреляционной обработки сигнала, определение его потенциальной точности измерения.
3. Краткий обзор широко известных методов измерения дальности
Измерение дальности до объекта является одним из обязательных элементов решения главной радионавигационной задачи. Физическим основанием измерения дальности является фиксация времени распространения радиосигнала между целью и радиолокационной станцией [4].
3.1 Импульсный метод
Это один из амплитудных методов радиолокационных измерений: для его реализации незатухающие колебания несущей частоты подвергаются в передатчике амплитудно–импульсной модуляции.
Функциональная схема дальномера представлена на рис. 1, а временные диаграммы – на рис. 2. Синхронизатор РЛС создает импульсы со строго стабильным периодом следования. Этими импульсами одновременно запускаются передатчик и генератор развертки, напряжение которого подается на горизонтально отклоняющие пластины ЭЛТ.
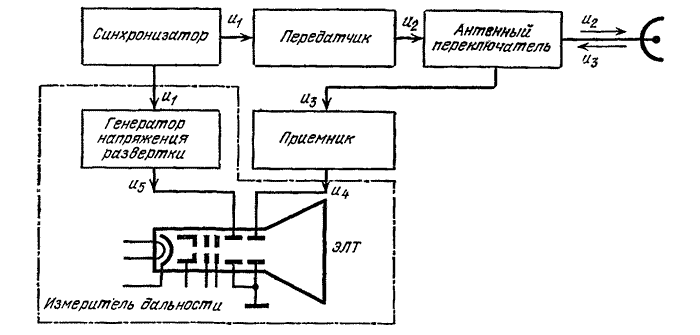
Рисунок 2. Функциональная схема импульсного радиодальномера
Радиоимпульсы передатчика имеют ту же частоту следования, что и синхронизирующие импульсы U1. Антенный переключатель направляет зондирующие импульсы в антенну и закрывает вход приемника на время передачи. После отражения от цели образуются радиолокационные импульсы U3, которые принимаются той же антенной. Вследствие несовершенства антенного переключателя на вход приемника проникает малая доля высокочастотной энергии передатчика, которая служит опорным сигналом для отсчета дальности. Все эти радиоимпульсы усиливаются и детектируются в приемнике, в результате чего получаются видеоимпульсы U4. Приложенные к вертикально отклоняющим пластинам ЭЛТ, они вызывают вертикальное отклонение светового пятна на экране трубки. Место отклонения зависит от напряжения развертки U5 в данный момент времени t.
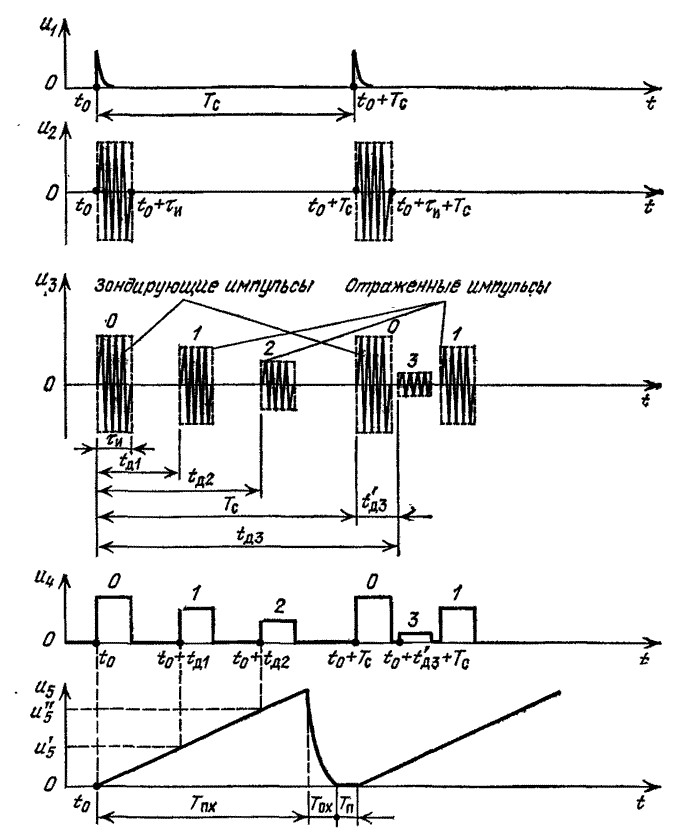
Рисунок 3. Временные диаграммы напряжений в импульсном радиолокационном дальномере
Напряжение U5 пилообразное, оно нарастает с постоянной скоростью во время прямого хода развертки и быстро уменьшается до исходной величины во время обратного хода развертки; далее следует интервал покоя вплоть до начала очередного цикла развертки. В связи с запаздыванием на время tд отраженного сигнала отметка его смещена от начала развертки на расстояние

Основные показатели импульсного метода дальнометрии:
- Потенциальная разрешающая способность по дальности определяется из тех соображений, что при сближении целей, их импульсы различаются до тех пор, пока разность времени запаздывания не сократится до длительности одного импульса. Этот предел соответствует расстоянию между целями
- Потенциальная разрешающая способность по дальности определяется из тех соображений, что при сближении целей, их импульсы различаются до тех пор, пока разность времени запаздывания не сократится до длительности одного импульса. Этот предел соответствует расстоянию между целями
- Предел однозначного отсчета дальности. Каждая РЛС в соответствии со своим энергетическим потенциалом имеет максимальную дальность действия Дмакс. Необходимо, чтобы период следования импульсов Тс был больше, чем tдмакс. Если это условие не соблюдается, то сигнал, отраженный от достаточно удаленной цели, принимается после излучения очередного зондирующего импульса 0 и отсчет дальности становится неоднозначным. Таким образом, однозначный отсчет дальности ограничивается периодом Тс.
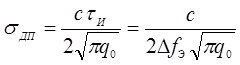
- Потенциальная точность измерения дальности выражается формулой, справедливой для всех методов дальнометрии:

Достоинство импульсного метода измерения дальности в том, что при сравнительно простой аппаратуре, позволяет одновременно измерять дальность многих объектов.
К недостаткам метода относятся невозможность измерения малых дальностей, этот недостаток объясняется тем, что во время излучения зондирующего сигнала приемник заперт. Данный метод не обеспечивает измерение радиальной скорости цели [1].
3.2 Частотный метод
Определение дальности до цели при использовании частотной модуляции (ЧМ) основано на измерении приращения частоты передатчика за время распространения сигнала до цели и обратно. Если предположить, что частота передатчика может изменяться по линейному закону, то изменение частоты отраженного сигнала будет запаздывать на время tз=2D/c. В результате смешения этих колебаний образуются биения, огибающая которых является чисто гармоническим колебанием, т. е. ее спектр состоит из одной спектральной линии. Величина приращения частоты (частота биений) равна
На практике используются различные виды периодической модуляции частоты, например: симметричный и несимметричный пилообразные законы, синусоидальный закон.
Рассмотрим случай симметричного пилообразного закона ЧМ. Структурная схема такой РЛС (дальномера) приведена на рис. 4.
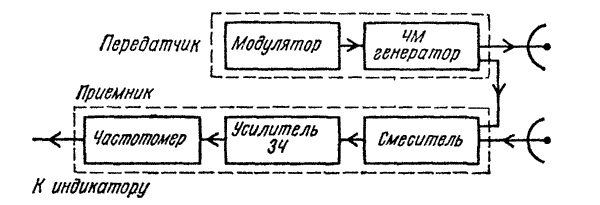
Рисунок 4. Функциональная схема частотного радиодальномера
Сигнал передатчика попадает на вход приемника (в смеситель) через антенну либо по специальной линии передачи. Отраженный сигнал от неподвижной цели, также попадающий на вход приемника, запаздывает на время tз. В результате смешения (сложения) двух колебаний на входе приемника образуются биения.
Мгновенная частота биений равна абсолютному значению разности мгновенных значений частот излучаемого и отраженного сигналов, хотя формально можно учитывать знак частоты. Сказанное иллюстрируется рис. 5. Частоту биений, которая в течение большей части периода модуляции остается постоянной, назовем основной. Ее значение, равно
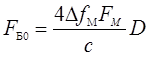
Небольшие отрезки времени, равные времени запаздывания tз, в течение которых частота не остается постоянной, называют зонами обращения. В средних точках этих зон функция проходит через нуль. Влияние зон обращения тем меньше, чем лучше выполняется неравенство Tм>>tз.
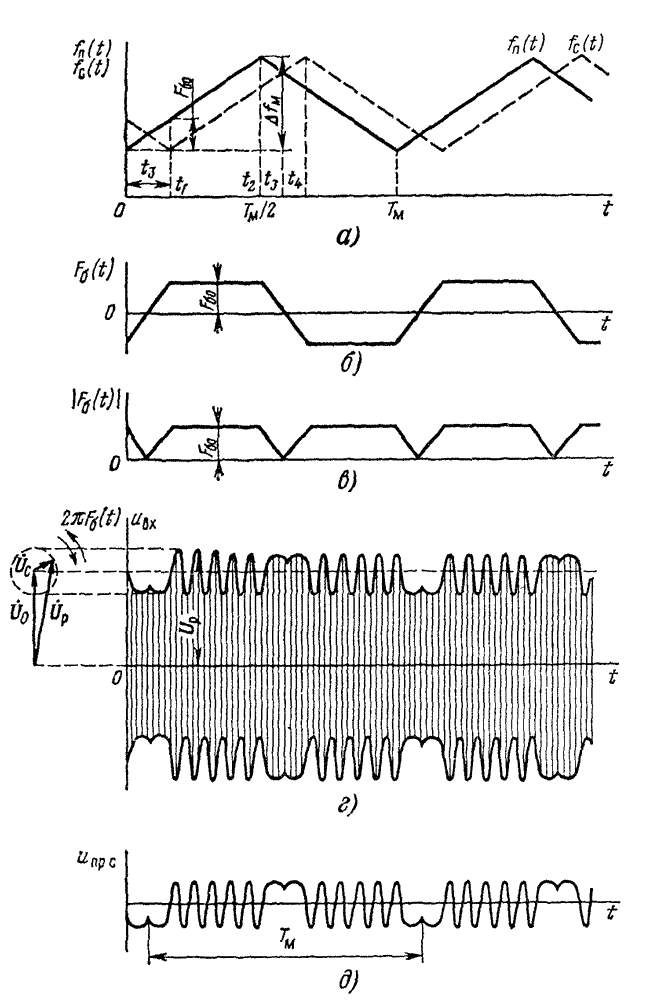
Рисунок 5. Временные диаграммы процессов в частотном радиодальномере
После детектирования в смесителе выделяется огибающая биений, обычно именуемая преобразованным сигналом. Преобразованный сигнал имеет постоянную частоту, исключая участки длительностью tз отстоящие друг от друга на расстоянии Tм/2, внутри которых его фаза изменяется на 180°. Чтобы определить дальность, необходимо измерить Fб0. Для этого может быть использован анализатор спектра (частотный метод). В случае одиночной цели часто применяется более простой частотомер, работающий по принципу счета числа периодов (временной метод).
Чувствительность приемника с непрерывным излучением радиоволн ограничена шумами передатчика. Для уменьшения их влияния следует увеличивать развязку (переходное затухание) между антеннами. Применение компенсации прямого сигнала дает развязку 10 ...60 дБ.
Широкое применение нашел весьма просто реализуемый метод измерения частоты биений путем счета числа импульсов преобразованного сигнала. При этом преобразованный сигнал подвергается ограничению и дифференцированию, после чего положительные или отрицательные импульсы запускают формирователь, вырабатывающий стандартные импульсы (определенной амплитуды, длительности и формы). Последние заряжают накопительный конденсатор счетчика. При симметричном пилообразном законе модуляции число импульсов за период модуляции равно

Существенным фактором, влияющим на счет числа импульсов, является «паразитная» амплитудная модуляция зондирующего и отраженного сигналов, вызванная резонансными свойствами колебательных систем передатчика, входа приемника и антенн, вибрациями, флуктуациями коэффициента отражения. Влияние паразитной модуляции можно уменьшить применением балансного смесителя.
К недостаткам частотного метода дальнометрии относятся: сложность аппаратуры при дальнометрии многих объектов; трудность эффективной развязки приемного и передающего трактов, необходимой для нормальной работы дальномера; высокие требования к линейности изменения частоты излучаемых колебаний при дальнометрии многих объектов.
Основные достоинства частотного метода измерения дальности – это малая пиковая мощность излучаемого сигнала по сравнению с мощностью при импульсном методе при высокой точности измерения и разрешающей способности по дальности и возможность измерения очень малых дальностей.
Отмеченные достоинства и недостатки частотного метода измерения дальности предопределили его использование в радиовысотомерах малых высот. При этом измеряется дальность до единственного объекта (поверхности суши или воды). При дальнометрии одного объекта частота излучаемого сигнала может изменяться по синусоидальному или другому, не обязательно пилообразному закону, что значительно упрощает аппаратуру [2].
3.3 Фазовый метод
При фазовом методе применяются непрерывные сигналы (не обязательно монохроматические). Измерение времени запаздывания производится путем измерения разности фаз между модулирующими колебаниями масштабной частоты, которые выделяются из излучаемого и принимаемого сигналов. Разность фаз между этими колебаниями связана с временем запаздывания равенством

Разность фаз может быть однозначно измерена в интервале (0; 360°). Поэтому максимальная дальность, в пределах которой возможно однозначное измерение, определяется соотношением

Для обеспечения однозначных измерений, например, в пределах от 0 до 100 км масштабная частота не должна превышать 1,5 кГц. Столь низкие значения исключают возможность использования в качестве масштабной частоты несущих колебаний излучаемых дальномером радиосигналов. В практически применяемых фазовых дальномерах в качестве масштабных используются либо частоты модулирующих колебаний, либо частоты биений между несущими колебаниями излучаемых сигналов (рис. 6).
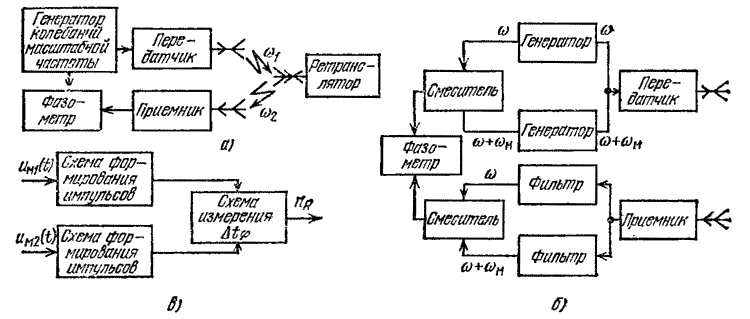
Рисунок 6. Функциональные схемы фазовых радиодальномеров
При измерении разности фаз на частоте биений передатчиком дальномера одновременно излучаются два гармонических сигнала. Разность фаз между биениями частоты, которые выделяются с помощью смесителя и фильтра из излучаемого и принимаемого сигналов, определяется формулой
В качестве измерителя разности фаз могут использоваться фазометры различных типов.
Основное достоинство фазового метода состоит в том, что выбором масштабной частоты может быть обеспечена очень высокая точность измерений. Вместе с тем этот метод имеет ряд существенных недостатков: невозможность одновременного измерения дальности нескольких объектов, находящихся в зоне облучения дальномера; необходимость подавления излучаемого сигнала, который поступает на вход приемника; сложность технической реализации, которая обусловлена необходимостью использования нескольких шкал [3].
4. Описание схемы радиодальномера на основе J–корреляционной обработки сигнала
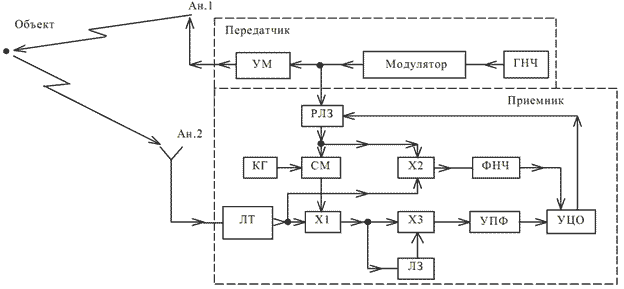
Рисунок 7. Структурная схема радиодальномера на основе J–корреляционной обработки сигнала
Ан. 1, Ан. 2 – передающая и приемная антенны, ЛТ – линейный тракт, УМ – усилитель мощности, КГ – кварцевый генератор, РЛЗ – калиброванная регулированная линия задержки, СМ – смеситель, Х1 – Х3 – первый – третий перемножители, ЛЗ – линия задержки, ФНЧ – фильтр нижних частот, УПФ – узкополосный полосовой фильтр, ГНЧ – генератор низкой частоты, УЦО – устройство цифровой обработки сигналов.
Выводы
Данная магистерская работа посвящена актуальной научной задаче исследования радиодальномера на основе j–корреляционной обработки сигналов.Проведенный анализ радиодальномера показывает возможность достижения высоких потенциальных характеристик. Точность измерения зависит от входного соотношения сигнал/шум, параметров сигнала и устройства, реализующего метод.
При написании данного реферата магистерская работа еще не завершена. Окончательное завершение: декабрь 2012 года. Полный текст работы и материалы по теме могут быть получены у автора или его руководителя после указанной даты.
Список источников
- Финкельштейн М. И. Основы радиолокации: Учебник для вузов. 1983. – 536 с.
- Теоретические основы радиолокации: Учебное пособие для вузов. Под ред. В. Е. Дулевича. 1978. – 608 с.
- Белоцерковский Г. Б. Основы радиолокации и радиолокационные устройства: Учебник для техникумов. 1975. – 336 с.
- Монаков А. А. Теоретические основы радионавигации: Учебное пособие. 2002. – 70 с.
- Коростелев А. А., Клюева Н. Ф., Мельник Ю. А. Теоретические основы радиолокации. 1978. – 608 с.
- Сорочан А. Г. Радиодальномер на основе j–корреляционной обработки сигнала.//Технология и конструирование в электронной аппаратуре. 2005.
- Васин В. В. Справочник–задачник по радиолокации. 1977. – 320 с.