
Реферат за темою випускної роботи
Зміст
- Введення
- 1. Мета і завдання дослідження, плановані результати
- 2. Складання проекту наземного фотограмметричного знімання
- 3. Обробка знімків
- Висновок
Введення
Фотограмметричні методи в геодезії є одними з найбільш рентабельних і високопродуктивних. Основними перевагами фотограмметричного методу є значне скорочення часу польових робіт, можливість повторити або доповнити вимірювання при вихідних умовах. До недоліків можна віднести те, що якість зображення залежить від рівня освітлення, сторонні об'єкти можуть створювати мертві зони на знімку.
На сьогоднішній день, існуючі аналогові камери типу фототеодоліт морально застаріли, і, крім того, не виробляються аналогові світлочутливі матеріали. Професійні цифрові камери мають високу ціну і, при невеликих обсягах наземної зйомки, їх використання буде неприбутковим. Неспеціалізовані цифрові камери дають можливість отримати зображення в цифровому вигляді і також виконувати обробку знімків на цифровій фотограмметричної станції. Отже виникає необхідність визначення точності такої обробки.
Для успішного вирішення завдання вивчення пам'яток архітектури, спостереження за деформаціями споруд потрібна наявність їх достовірних зображень. Визначення натурних розмірів споруд за вимірюваннями моделей виконують для таких проектованих споруд, форми яких не можуть бути виражені математичними рівняннями, - скульптур, барельєфів і т.д.
1. Мета і завдання дослідження, плановані результати
Метою магістерської роботи є обгрунтування використання неспеціалізованої камери для цілей архітектурної стереофотограмметрічеськой зйомки. Для цього необхідно вирішити наступну наукову задачу: визначити точність, яку можна отримати при стереофотозніманні архітектурного об'єкта, використовуючи неметричну фотокамеру. Прикладним завданням дослідження є порівняння отриманої моделі з моделлю, побудованою за допомогою електронного тахеометра.
На підставі отриманої точності і результатів порівняння буде визначено оптимальний метод створення тривимірних моделей об'єктів архітектури.
Об'єктом дослідження є наземна стереофотограмметричне знімання. Предмет - точність, з якою можна виконати стереофотознімання неспеціалізованої фотокамерою.
2. Складання проекту наземного фотограмметричного знімання.
Першим етапом експеременту була наземна стереофотограмметрична зйомка. Об'єктом зйомки був обраний фасад 5го корпусу ДонНТУ, зйомка проводилася 5 мПикс фотоапаратом Olympus E-20P.
Види наземної стереофотограмметрічної зйомки класифікуються в залежності від розташування осей камери щодо базису. При виконанні зйомки використовувався конвергентний випадок фотографування, базис 4 м.
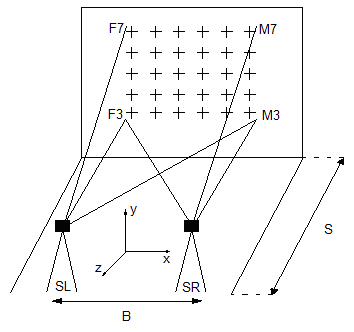
Рисунок 1 - Конвергентний випадок фотографування
При конвергентному випадку фотографування оптичні осі фотокамер перетинаються, коородінати об'єкта визначають шляхом вимірювання стереомоделі. За початок фотограмметричної системи координат беруть оптичний центр об'єктива на лівій точці базису фотографування, т. е. центр проекції лівого знімка, за вісь ординат - напрям оптичної осі фотокамери на лівої точці базису, перпендикулярне йому напрям в горизонтальній площині - за вісь абсцис Х, за вісь аплікат - напрямок, перпендикулярний площині, утвореної осями X, Y.
Значення елементів зовнішнього орієнтування, необхідні для ичісленія фотограмметричних координат визначають у процесі фотографування. Елементи внутрішнього орієнтування відомі, тому що фотокамера цифрова, або визначаються за результатами дослідження камери.
Після вибору станцій приступають до проектування базисів, які повинні задовольняти наступним вимогам:
- Знімальні трапеції повинні покривати весь знімається ділянку без розривів і великих перекриттів. Кінці базису розташовуються в зручних місцях;
- В межах знімальних трапецій не повинно бути ділянок, в яких не видно об'єкта або стереоефекту.
Для розрахунку рамок знімальних трапецій використовують такі формулами:
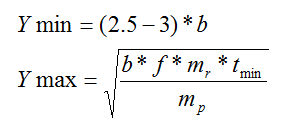
де tmin - коефіцієнт, що враховує відхилення осей зйомки (ми приймаємо 1); mp - точність зняття координат на зображенні; mr - допустима С.К.О. визначення координат контуру.
На підставі розрахунків та обраної камери, намічається положення базису. На кожній знімальної трапеції намічають положення коректурних точок. це такі точки, для яких відомі виміряні геодезичні координати (опорна точка) або напряму (кут між напрямком на коректурним точку і напрямком на базис). Координати опорних точок будуть отримані з результатів зйомки електронним тахеометром в безвідбивному режимі.
Розрахунок довжини базису виконується виходячи з дальності фотографування і необхідної точності визначення координат знімальних пікетів.
Предрасчет точності можна виконати за наступними формулами:
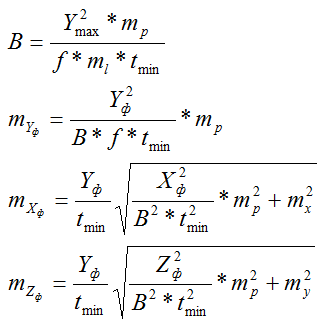
де ml - С.К.О. знімального пікету (1см); mx = my = mp = 0.5 пікселя.
3. Обробка знімків
Наступним етапом роботи була обробка стереопари з ЦФС Erdas Imagine.
Кожен файл проекту, створеного в Erdas Imagine містить інформацію про всі маршрути та знімках, включених в план фотозйомки. Зокрема, дані про розташування знімків, параметри камери, вимірювання координатних міток, опорних і сполучних точок.
При нанесенні на знімки, координати опорних точок, попередньо отриманих в результаті тахеометричної зйомки в безвідбивному режимі, вводять вручну, а координати додаткових точок визначаються автоматично. Математичні співвідношення між знімками, складовими блок, встановлюється функцією Тріангуляція, і в процесі її виконання обчислюються остаточних значень для параметрів зовнішнього орієнтування. У звіті тріангуляції представлена ??оцінка точності вирівнювання стереопари.
Схема розташування знімків стереопари, опорних і сполучних точок після вирівнювання представлена. Поле цього проект готовий до фінальної частини створення цифрової моделі.
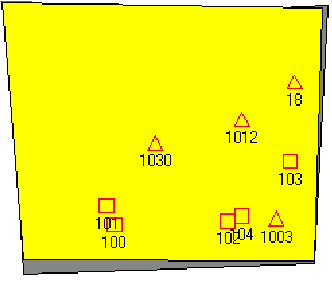
Рисунок 2 – Схема розташування знімків після вирівнювання..
В процесі відтворення структурних ліній використовувався Planar Dual-LCD Professional 3D Mnitor, який дозволяє переглядати об'ємне зображення високої якості. Це дозволяє прискорить процес обробки, значним чином впливає на зручність роботи.
Наступним етапом була обробка маршруту в ЦФС Delta Digitals.
І так, були отримані дві 3-х мірних цифрових моделі одного об'єкта. Через різних алгоритмів зрівнювання отримані моделі відрізняються. вплив поздовжнього і поперечного паралакса більше в моделі однаковох в Erdas Imagine, відповідно модель, уравненная в Block MSG геометрично точніше. Час на побудову моделі в цифрових станціях було витрачено практично однаково, але працювати в стерео режимі набагато зручніше.
Недоліком проведеного експерименту явлется те, що опрние точки, які використовувалися для орієнтування знімків не були позначені на самому о'бекте марками під час зйомки, соответсвенно точність визначення положення опроной точки на знімку могла досягати 30 міліметрів на місцевості, що істотно полвіяло на точність побудови моделі, відповідно результати визначення точності не можуть вважатися обьектівниє.
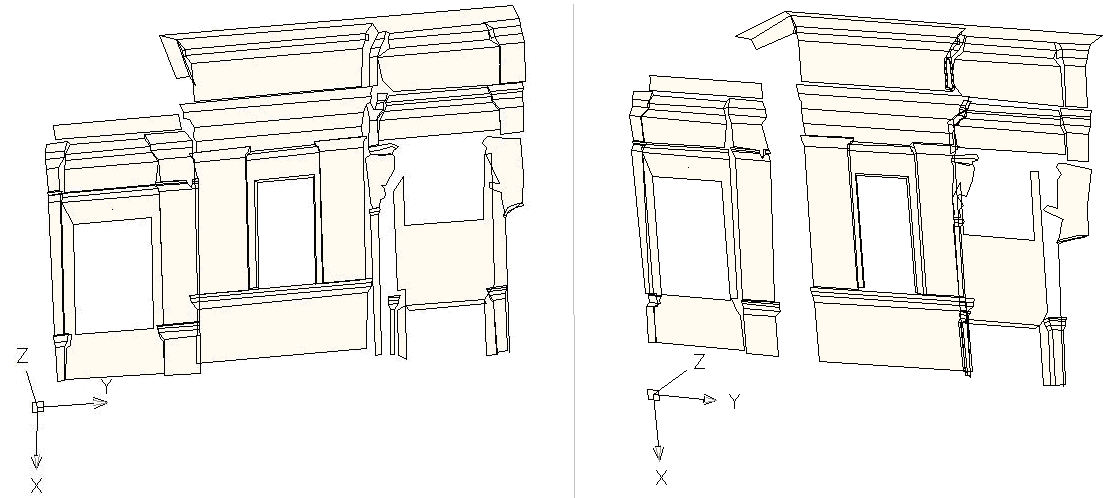
Рисунок 3 – Модель об'єкту, що знімався.
Цей недолік був врахований при повторенні експеременту.
Так само, в ході польових робіт були визна кооордінати фатокамери в момент зйомки, щоб в Надалі дослідити, чи підвищить це точність побудови моделі.

Рисунок 4 – Хід виконання польових робіт.
Висновок
В результаті роботи будуть отримані три 3-D моделі, що знімається. Одна модель буде побудована традиційним методом (на основі тахеометричної зйомки), ще дві моделі будуть отримані в різних ЦФС (через різні алгоритмів зрівнювання в ЦФС, отримані моделі будуть відрізнятися).
Фотограмметричних метод побудови моделі володіє незаперечною перевагою в плані зручності вимірювань, тому що вихідні дані зберігаються в пам'яті комп'ютера і, в разі помилки, немає необхідності в повторних польових вимірах, самі польові роботи займають набагато менше часу, камеральна обробка виконується відносно швидко.
Точність отримання координат тахеометричним методом свідомо вище, але для вирішення низки завдань буде досить точності, якої можна домогтися фотограмметричних методом. Порівнявши всі показники і характеристики обох методів, можна буде зробити висновки про доцільність, рентабельності, трудомісткості застосування фотограмметричного і тахеометрического методів.
При написанні даного реферату магістерська робота ще не закінчена. Остаточне завершення - грудень 2012 року. Повний текст роботи та матеріали по темі можуть бути отримані у автора або його керівника після зазначеної дати.
Список джерел
- Буров М.И. Практикум по фотограмметрии / Буров М.И. - М.: НЕДРА, 1987. - 302 с.
- Могильный С.Г. Фотограмметрия / Могильный С.Г., Беликов И.Л., Ахонина Л.И., и др. - Киев: Вища школа, 1985. - 278 с.
- Назаров А.С. Фотограмметрия: учебное пособие для студентов вузов / Назаров А.С. - Минск: ТетраСистемс, 2006. - 368с.
- Агапов С.В. Фотограмметрия сканерных снимков / Агапов С.В. - М.: Геодезиздат, 1996. - 178 с.
- Калантаров Е.И., Говоров А.В., Никишин Д.А. Универсальные методы цифровой фотограмметрии. // Известия ВУЗов. Геодезия и аэрофотосъемка. – 2003. – №6. – С. 47-55
- Калантаров Е.И., Никишин Д.А. Развитие процессов фотограмметрии перспективными методами. // Известия ВУЗов. Геодезия и аэрофотосъемка. – 2003. – №1. – С. 95-104
- Антипов И.Т. Пространственная фототриангуляция с использованием координат центров проектирования // Геодезия и картография. – 2004. – №8. – С. 21-30
- Катушков В.А., Сердюков В.М. Моделирование макетных снимков для задач наземной фотограмметрии. // Геодезия и картография. – 1999. – С. 22-25
- Гельман Р.Н., Никитин А.В. О стереофотосъемке фасада здания // Геодезия и картография. – 2008. – №1. – С. 29-33
- Гельман Р.Н. Возможности использования обычных цифровых камер для наземной стереосъемки. // Геодезия и картография. – 2000. – №4. – С. 39-41