
Реферат за темою випускної роботи
Зміст
- Введення
- 1. Актуальність теми
- 2. Мета і задачі дослідження та заплановані результати
- 3. Обгрунтування режиму пуску стрічкового конвеєру
- 4. Обгрунтування режиму гальвання стрічкового конвеєру
- Висновки
Введення
Головну роль в господарстві нашої країни відіграє промисловість. Україна має можливість для розвитку всіх галузей промисловості. В даний момент працює 9940 підприємств. Частка промисловості в економіці країни складає 42%. Вугільна промисловість України – це могутній багатофункціональний виробничий комплекс зі значними обсягами виробництва і послуг, багатогранним характером діяльності, складними внутрішніми і зовнішніми зв'язками, специфічними умовами роботи, як підприємств, так і працівників. В даний час в галузі функціонують 19 державних холдингових компаній; 8 виробничих об'єднань по видобутку вугілля; 10 самостійних шахт; спеціалізовані холдингові компанії і державні відкриті акціонерні суспільства по збагаченню вугілля, геологічній розвідці, бурінню свердловин, по ремонту устаткування, автоматизації, зв'язку, будівництву шахт і розрізів; крупні заводи вугільного машинобудування, інші підприємства і організації. Очевидно, що в такій великій інфраструктурі величезне значення має якість і своєчасність транспортних і логістичних операцій, які, в свою чергу, залежать від надійності транспортних машин. Найбільш високопродуктивним типом транспортних машин є машини безперервної дії, зокрема стрічкові і скребкові конвеєри. Вони широко використовуються у вугільній промисловості, де повна або часткова конвеєризація крупних шахт забезпечує інтенсивне ведення гірничих робіт і збільшує продуктивність праці.
1. Актуальність теми
Стрічковий конвеєр є найбільш поширеним типом транспортуючих машин, він служить для переміщення насипних або штучних вантажів. Застосовується на промислових виробництвах, у рудниках і шахтах, у сільському господарстві. Вантаж переміщається по стрічці в горизонтальній площині або під кутом до 90° до горизонту, від яких залежить динамічні характеристики пуску та гальмування стрічкового конвеєру. Пуск конвеєрів через великі інерційних мас і статичних навантажень відрізняється значною тривалістю і супроводжується істотним нагріванням двигунів. Перевантаження конвеєра, знижена напруга живлення, деякі види несправності в механічному та електричному обладнанні можуть призводити до додаткового затягування процесу пуску і внаслідок цього до неприпустимого перевищення температури двигуна. Крім того, перевантаження стрічкових конвеєрів може призвести до пробуксовування тягового елемента на приводному органі При цьому закінчився процес пуску двигуна не виводить конвеєр на робочу швидкість, а тривале буксування призводить до псування тягового елемента, тому у всіх випадках тривалого пуску конвеєра понад регламентованого часу привід необхідно відключити. Тому, для економії електроенергії, часу пуску та, збереження приводу та стрічки розглядається ця тема.
2. Мета і задачі дослідження та заплановані результати
Мета роботи – побудувати та розрахувати математичну модель при пуску чи гальмуванні стрічкового конвеєру.
Основні задачі дослідження:
- обґрунтувати пускові режими стрічкового конвеєру.
- обґрунтування гальмування стрічкового конвеєру.
- побудувати математичну модель для розрахунку режимів пуску та гальмування.
Об'єкт дослідження: Стрічковий конвеєр.
Предмет дослідження: Динамічні процеси при пуску та гальмуванню стрічкового конвеєру
В рамках магістерської роботи планується отримання актуальних наукових результатів по наступним напрямкам:
- Отримати та розрахувати математичну модель динамічних процесів при пуску стрічкового конвеєру.
- Отримати та розрахувати математичну модель динамічних процесів при гальмуванні стрічкового конвеєру.
3. Обгрунтування режиму пуску стрічкового конвеєру
Моделювання процесів пуску стрічкових конвеєрів зводиться до заміни неперервної моделі на дискретну, в якій зв'язки між точковими масами замінюються пружними і дисипативних зв'язками. В результаті, модель описується системою звичайних диференціальних рівнянь з відповідними початковими і граничними умовами. Рішення отриманої системи - в загальному випадку нелінійних звичайних диференціальних рівнянь - представляє також великі труднощі. Тому в задачах оптимального керування пуском стрічкового конвеєра така модель не має практичного застосування. Для вирішення завдань пуску застосовувався метод перетворення Лапласа. В результаті, знайдені рішення задач пуску стрічкового конвеєра для лінійних характеристик двигуна. Однак, в загальному випадку для нелінійних і розривних характеристик двигуна цей метод не застосовний. Отже, в даний час не існує адекватної математичної моделі динамічних процесів пуску стрічкових конвеєрів з нелінійними і розривними характеристиками двигунів. Для модулювання процесів пуску стрічкового конвеєру користується метод припасовки (зшивки). Сутність метода припасовки складається в тому, що диференційне рівняння, які описують динамічний процес, вирішується у загальному вигладі для кожної окремої лінійної ділянки апроксимувальної характеристики двигуна. Потім, по заданим початковим і граничним умовам, які є рішенням диференціального рівняння процесу для попередньої лінійної дільниці апроксимувальної характеристики двигуна, знаходяться довільні константи рішення диференціального рівняння процесу для подальшої лінійної ділянки характеристики двигуна. Так послідовно знаходяться рішення для всіх лінійних ділянок апроксимувальної характеристики двигуна.

Рис.3.1 - Стрічковий конвеєр
Система диференціальних рівнянь, описуючі динамічні процеси пуску стрічкового конвеєру, має вигляд:

При початкових умовах n=0:
Vг(E,0)=Vx(E,0)=0; Wг(E,0)=Wx(E,0)=0
де Wг(E,n), Wx(E,n) – динамічні складові натягнень на вантажної і холостої гілках стрічки конвеєра відповідно, Н; Vг(E,n), Vx(E,n) - швидкості точок вантажної і холостої гілках стрічки конвеєра відповідно, м/с; E, n - відповідно безрозмірні координати і час; а - швидкість поширення пружних збурень в стрічці, м/с; Е - агрегатна жорсткість стрічки при її розтягуванні, Н; p - еквівалентна погонна щільність стрічки, кг/м ( p = Е/ а^2).
Безрозмірні координати і безрозмірний час визначається по формулам:
E= х/L; n=at/L
де х – координата, спрямована уздовж стрічки в напрямку головного барабана, с центром на осі хвостового барабану конвеєру, м; t - поточний час, с; L – довжина контуру стрічки конвеєру, м.
Граничні умови на хвостовому і приводному барабанах залежать від типу натяжного пристрою.
Для жорсткого натяжного пристрою в силу умови нерозривності стрічки маємо:
на хвостовому барабані: при E=о
Vг(0,n)= -Vx(0,n), Wг(0,n)= -Wx(0,n);
на приводному барабані при: E=1/2
Vг(1/2,?)= -Vx(1/2,n)
Wг(1/2,?) -Wx(1/2,n)= F(Vг) – G1 - (a*m/L)*dV/dn
де F(Vг) – пускова характеристика приводу в координатах F, V, Н; G1 - сила опору руху стрічки і вантажу, яка включає скочующуся силу від ваги вантажу і стрічки конвеєра, Н; m – приведена маса вантажу обертових частин приводу стрічкового конвеєру, кг.
При цьому пускова характеристика двигуна апроксиміровалась кусочно-лінійним сплайном, котрий можна подати у вигляді

де Ni - координата перетину i-ї лінійної ділянки апроксимовуваноъ характеристики з віссю OF, H; q - тангенс кута нахилу лінійної ділянки апроксимувавоної характеристики до осі, кг/с; n - моменти переходу з одного лінійного ділянки пускової характеристики на інший; 6(n) - одинична функція Хевисайда; n – кількість лінійних ділянок характеристики.
Рис.3.2 - Пускова характеристика приводу
Згідно методу припасування, отримаємо рішення системи диференціальних рівнянь для i-ї лінійної ділянки апроксимовуваної характеристики двигуна.
Отже, обчисливши швидкість стрічки на приводному барабані, підставляючи ці значення, отримаємо швидкість і динамічне зусилля в будь-якій точці стрічки конвеєра.
4.Обгрунтування режиму гальвання стрічкового конвеєру
Екстремальні натягу стрічки і найгірші умови по зчепленню на приводних (гальмівних) барабанах можуть мати місце при гальмуванні конвеєра. Це стосується насамперед до похилим конвеєрам з негативним перепадом висот між кінцевими барабанами (в шахтах це бремсбергових конвеєрів). Якщо привід конвеєра і гальмівний пристрій розташовані в головній частині конвеєра, то при гальмуванні конвеєра від привода по верхній завантаженої гілці конвеєра починає поширюватися пряма хвиля, яка зменшує початкове натяг сталого режиму. В конвеєрі з жорстким натяжним пристроєм але нижньої гілки поширюється пряма хвиля динамічного розтягнення, якщо на конвеєрі встановлено податливе натяжний пристрій (див рис.1, б), то ця хвиля відсутня і каретка натяжного пристрою переміщується у напрямку до приводу. Так як в бремсбергових конвеєрах з кутом установки більш -3 ... -5 ° двигун працює в генераторному режимі і в точці набігання на привід стрічка має мінімальне натяг, то при подальшому зниженні цього натягу може бути вичерпаний запас по зчепленню на приводі і почнеться повне ковзання стрічки, що може привести до аварійної ситуації крем того, натяг стрічка може впасти нижче рівня, при якому забезпечується сталий рух без утворення неприпустимих прогинів між роликоопорами Так як при переході від сталого режиму до режиму гальмування напрямок сил опору руху не змінюється, то і швидкості поширення хвиль. Прямі хвилі частково відбиваються від кордону навантаженого і порожнього ділянок стрічок, коефіцієнти відбиття і знаки відбитих хвиль.
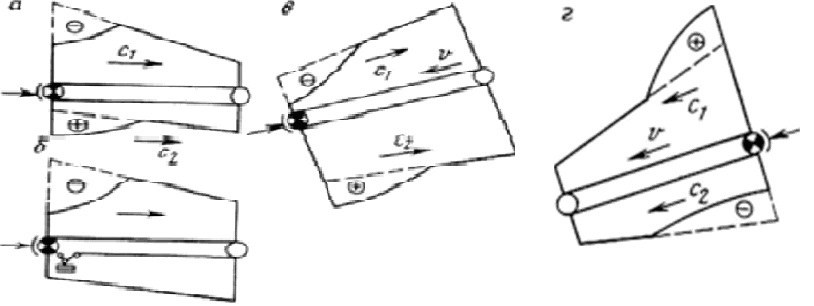
Рис.4.1 - Поширення хвиль при гальмуванні конвеєра: а, б - горизонтального ярма ухилу, г - бремсберговому
Для схеми з жорстким натяжним пристроєм натягнення в точці набігання має мінімум в момент часу розрахункова формула має вигляд:
 де
де
 - наведене до ободу барабана гальмівне зусилля;y - кутовий коефіцієнт механічної характеристики гальмівного пристрою;W - тягове зусилля привода в сталому режимі (в генераторному режимі - негативно)
Максимальний натяг при гальмуванні навантаженого бремсберговом конвеєра виникає в хвостовій частині конвеєра через після початку гальмування:
- наведене до ободу барабана гальмівне зусилля;y - кутовий коефіцієнт механічної характеристики гальмівного пристрою;W - тягове зусилля привода в сталому режимі (в генераторному режимі - негативно)
Максимальний натяг при гальмуванні навантаженого бремсберговом конвеєра виникає в хвостовій частині конвеєра через після початку гальмування:

де Ko - коефіцієнт, що враховує зниження амплітуди прямої хвилі внаслідок внутрішнього тертя в стрічці у міру її поширення до хвостової частини конвеєра. Для схеми з податливим натяжним пристроєм мінімальне натяг в точці набігання в залежності від інтенсивності хвилі, відбитої від границі вантажної і порожньої гілок стрічки. Для аналізу стійкості руху стрічки на роликовому ставі в режимі гальмування необхідно визначити динамічні натягу стрічки в різних точках по довжині става. При руху поширенні прямої хвилі ослаблення натягу вздовж завантаженої гілки натяг в точці, віддаленій від привода на відстань х, починає падати через час після початку гальмування і до моменту приходу в точку хвилі розтягнення.Тому

де
Умова стійкості дотримується, якщо
де Lp - відстань між роликоопорами на навантаженому гілки Рішення задачі про стійкість стрічки на роликовому ставе протягом усього періоду гальмування вимагає вельми громіздкого аналізу хвильових процесів, тому ці розрахунки доцільно проводити за допомогою обчислювальної техніки, особливо при складному профілі траси конвеєра. При установці привода бремсберговом конвеєра в зоні максимальних статичних натягів після докладання гальмівного зусилля по завантаженої гілки поширюється хвиля динамічного розтягування. Тому така схема кращий з погляду забезпечення стійкості завантаженої стрічки при гальмуванні Крім того, так як привід встановлений в зоні максимальних натягів, легко забезпечити необхідний запас по зчепленню на приводних барабанах і відсутність ковзання стрічки, коли динамічні натягу поблизу привода досягають екстремальних значень. З цих же причин іноді в бремсбергових конвеєрах застосовують схему, коли привід встановлюють в головній частині конвеєра, а гальмівний пристрій - на хвостовому барабані. У бремсбергових конвеєрах з гальмівним пристроєм, встановленим на головній станції конвеєра в зоні мінімальних статичних натягів, відсутність прослизання стрічки можна забезпечити лише при значному запасі по зчепленню на гальмівному барабані, що призводить до необхідності збільшення натягу контуру стрічки в сталому режимі, тек необхідності застосування більш міцною стрічки.
Висновки
1) Пуск конвеєрів через великі інерційних мас і статичних навантажень відрізняється значною тривалістю і супроводжується істотним нагріванням двигунів. Перевантаження конвеєра, знижена напруга живлення, деякі види несправності в механічному та електричному обладнанні можуть призводити до додаткового затягування процесу пуску і внаслідок цього до неприпустимого перевищення температури двигуна. Крім того, перевантаження стрічкових конвеєрів може призвести до пробуксовування тягового елемента на приводному органі При цьому закінчився процес пуску двигуна не виводить конвеєр на робочу швидкість, а тривале буксування призводить до псування тягового елемента, тому у всіх випадках тривалого пуску конвеєра понад регламентованого часу привід необхідно відключити. 2) Побудована математична модель, по якій може бути розраховані динамічні зусилля при пуску конвеєру. 3) Побудована математична модель, по якій може бути розраховані динамічні зусилля при гальмуванні конвеєру.
При написанні даного реферату магістерська робота ще не завершена. Остаточне завершення: грудень 2011 року. Повний текст роботи та матеріали по темі можуть бути отримані у автора або його керівника після зазначеної дати.
Перелік посилань
1. Бужинский И.А. Определение рациональных пусковых характеристик привода наклонного ленточного конвейера / И.А. Бужинский, Р.А. Кирия// Машины для предприятий горной промышленности. – К., 1986. - с.30-38
2. Кирия Р.В. Влияние типа натяжного устройства и места его установки на динамику пуска ленточного конвейера / Р.В. Кирия, В.Ю. Масютенко, И.А. Бужинский// Сб. науч. тр. Геотехническая механика – Д. -2006. – Выш. №67. – с.73-83.
3. Попов Е.П. Теория нелинейных систем автоматического регулирования и управления. – М., 1988. – 256с.
4. Спиваковский А.О. Теория ленточных конвейеров/ А.О. Спиваковский, В.Г. Дмитриев. – М., 1982. – 192с.
5. Штокман И.Г. Динамика тяговых цепей рудничных конвейеров. – М., 1959. – 304с.
6.Галкин В. И. , Дмитриев В. Г. , Дьяченко В. П. , Запенин И. В. , Шешко Е. Е.Современная теория ленточных конвейеров горных предприятий. Учебное пособие; М.: Горная книга, 2011. - 544 с.