До бібліотеки
РОЗРОБКА ВИМІРЮВАЛЬНОГО ІНТЕРФЕЙСА ДЛЯ ЗАБЕЗПЕЧЕННЯ ЗВОРОТНЬОГО ЗВЯЗКУ ЗА КОНТАКТНОЮ ДЕФОРМАЦІЄЮ ЛАНКИ МАНІПУЛЯТОРА РОБОТА
Автор: Камозіна О.І., Переверзєв І.С.
Джерело: СУЧАСНІ ПРОБЛЕМИ СИСТЕМ ЕЛЕКТРОПОСТАЧАННЯ ПРОМИСЛОВИХ ТА ПОБУТОВИХ ОБ’ЄКТІВ 2012 / Матерiали І всеукраїнської науково-технічної конференції викладачів, аспірантів і студентів. — Донецьк, ДонНТУ — 2012, с. 147-148.
Анотація
Камозіна О.І., Переверзєв І.С. - РОЗРОБКА ВИМІРЮВАЛЬНОГО ІНТЕРФЕЙСА ДЛЯ ЗАБЕЗПЕЧЕННЯ ЗВОРОТНЬОГО ЗВЯЗКУ ЗА КОНТАКТНОЮ ДЕФОРМАЦІЄЮ ЛАНКИ МАНІПУЛЯТОРА РОБОТА. Було розроблений та експериментально перевірений
прототип вимірювального інтерфейсу між давачами деформації та робочою станцією ПК робота-маніпулятора, що застосовується для реалізації системи взаємодії робота із його
навколишнім середовищем.
Вступ
Персональний комп’ютер (ПК) є невід’ємною частиною сучасного
лабораторного дослідницького стенда. Спеціалізовані інтерфейсні модулі дозволяють
здійснювати обмін інформацією між робочою станцією на основі ПК та периферійними
пристроями (об’єктом управління). Інтерфейс вимірювальних перетворювачів сигналів і
персонального комп’ютера дослідницького стенда фізично організовано за допомогою
додаткових модулів узгодження сигналів та послідовних портів вводу-виводу. Порт являє
собою точку підключення зовнішнього пристрою комп’ютера до внутрішньої шини
процесора. Програма або пристрій можуть посилати дані у порти або отримувати дані з
портів для обробки процесором. Введення-виведення інформації через шину відбувається у
вигляді послідовності цифрових сигналів [1], тому первинний вимірювальний перетворювач,
який перетворює фізичну величину в аналоговий непереривний сигнал, підключається до
входу цифро-аналогового перетворювача (АЦП).
Актуальність.
Стрімкий розвиток робототехнічної індустрії вимагає вдосконалення
систем керування, організації нових способів інтерактивного управління роботами. Для
цього потрібна організація контурів управління за різноманітною інформацією: тактильний
зворотний зв’язок, візуальна інформація (оптичний потік), зовнішня прикладена сила
(відносна деформація ланки). Різноманітність та складність первинних перетворювачів та
відповідних фізичних процесів, які мають місце при відмірюванні, вимагає створювати
специфічні вторинні перетворювачі [2] для узгодження параметрів сигналу із входом
аналого-цифрового перетворювача ПК.
Для реалізації ланки «вимірювальний перетворювач – персональній комп’ютер»
необхідно провести аналого-цифрове перетворення сигналу давача. В роботі використано
аналого-цифровий перетворювач National Instruments PCI 6023E, бібліотеку драйверів для
отримання даних Comedi та Comedilib (остання надає програмний інтерфейс для пристроїв
отримання аналогової інформації).
Нами розроблено фізичний інтерфейс для ПК, що дозволяє обробляти сигнали давача
сили (групи тензодавачів). Була використана інструментальна мікросхема-підсилювач
INA118р, яка має високу точність і великий коефіцієнт підсилення (рис. 1).
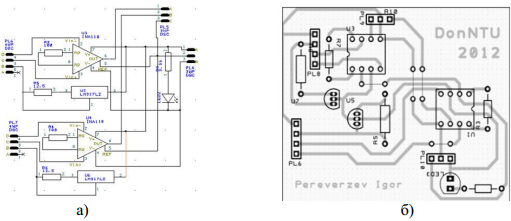
Рисунок 1 – Фізичний інтерфейс між первинними перетворювачами сили і АЦП: (а)
електрична принципіальна схема; (б) печатна плата
Первинна перевірка роботи тензометричної системи здійснюється в режимі вільних
коливань (рис. 2). Один край балки жорстко зафіксований,а до іншого було прикладене
імпульсне зусилля. Отримали графік затухаючих коливань балки (рис. 3, а).
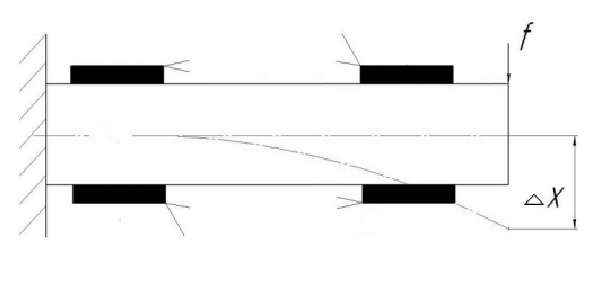
Рисунок 2 – Розміщення датчиків на балці
В момент часу t = 1?2 с до балки прикладається зусилля вгору, а потім його різко
убирають,таким чином виникають затухаючі коливання балки. В час t = 5?6 с прикладаються
зусилля вгору-вниз, які потім також різко зникають. Ми бачимо, що система у спокої
знаходиться не в нулі, існує зміщення сигналу, цей ефект спричинено тим, що розміщення
датчиків на балці не ідеально симетричне.
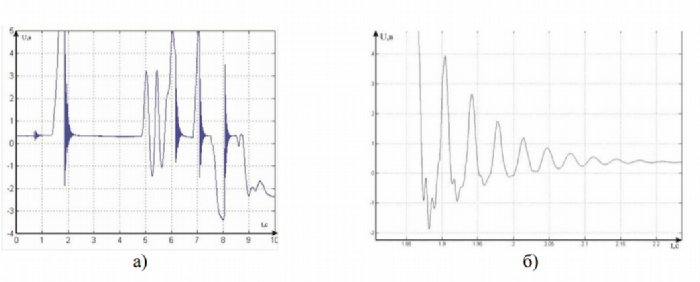
Рисунок 3 – Експериментальні дані, перевірка підсилювача в режимі вільних коливань: (а)
повна діаграма; (б) графік вільних коливань консольної балки
Наступним етапом перевірки роботи було прикладення статичних зусиль до жорстко
зафіксованої з однієї сторони консольної балки, в результаті нами отримано сигнал,
пропорційний до прикладеного зусилля.
Висновки.
В результаті роботи був розроблений та експериментально перевірений [3]
прототип вимірювального інтерфейсу між давачами деформації та робочою станцією ПК
робота-маніпулятора, що застосовується для реалізації системи взаємодії робота із його
навколишнім середовищем. Інтерфейс розроблено на сучасній базі електронних компонентів
та він є конкурентоспроможним із існуючими аналогами.
Дана робота виконується в рамках українсько-французького науково-дослідного
проекту ДонНТУ та Universite de Cergy-Pontoise (НДР 12-316 «Біо-подібні Моделі
гуманоїдніх роботів у рітмічній взаємодії з їх навколішнім оточенням»).
Перелік посилань
1. Бусигін Б.С. Прикладна інформатика: Підручник / Б.С. Бусигін, Г.М. Коротенко, Л.М. Коротенко // Дніпропетровськ: Національний гірничий університет, 2004. – 559 с.
2. Хоменко В.М. Вимірювальний перетворювач сигналів // В.М. Хоменко, А.А. Мельник, В.Ф. Борисенко // Деклараційний патент на корисну модель 51164.
3. Рябченко В.В. Исследование взаимодействия роботов-манипуляторов с окружающей
средой / В.В. Рябченко, Н.Н. Дацун // Материалы III всеукраинской научно-технической
конференции студентов, аспирантов и молодых ученых «Информационные управляющие
системы и компьютерный мониторинг – 2012». 16-18 аплеля 2012 г., г. Донецк, 2012. – Секц.
6 – 1 електрон. опт. диск. (CD-ROM).