До бібліотеки
Адаптивне керування приводом інвалідного візка при компенсації та спрощенні дій третьої особи.
Автори: Д.О. Іпанов, О.І. Камозіна
Джерело: ЭЛЕКТРОТЕХНИЧЕСКИЕ И ЭЛЕКТРОМЕХАНИЧЕСКИЕ СИСТЕМЫ / Материалы XVIII Всеукраинской студенческой научно-технической конференции. - Севастополь, 2013
Анотація
Д.О. Іпанов, О.І. Камозіна - Адаптивне керування приводом інвалідного візка при компенсації та спрощенні дій третьої особи.
В роботі було розглянуто загальні властивості штучних нейонних мереж, их применения для управления инвалидным креслом с электроприводом.
В роботі запропоновано метод управління електричним інвалідним кріслом, що спрощує дії третьої особи. Ураховуючи можливі переміщення крісла, була розроблена його кінематична модель на базі
системи рівнянь:
які дають можливість показати переміщення у площині. У модель у якості початкових задаються Х0, Y0, ?0.
Характер прикладних сил до крісла третьою особою, а також швидкості кожного колеса приведені на рис. 1.
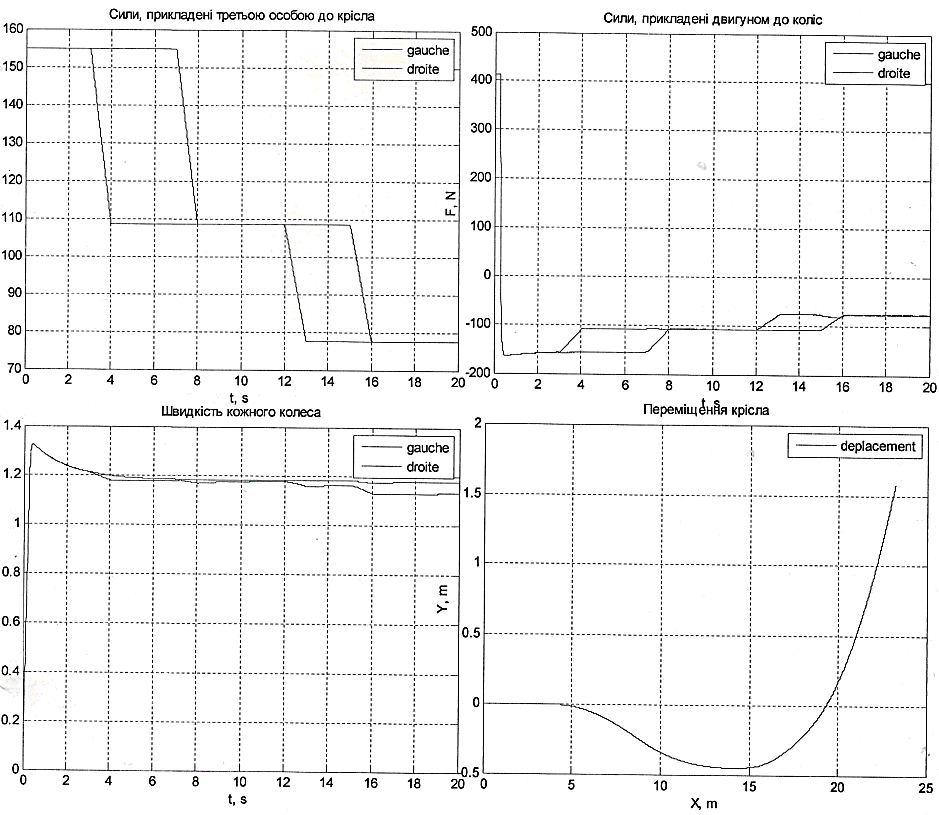
Рисунок 1 – Характер зміни сил від третьої особи та відпрацювання швидкостей колесами
Для управління кріслом запропоновано використати статичну нейронну мережу на першому етапі досліджень, для другого етапу – буде використана динамічна нейронна мережа і виконано навчання
нейронної мережі ехо станів на базі реальних даних, отриманих у ході експериментальних досліджень.
Перелік посилань
1. Jaeger Herbert. Reservoir computing approaches to recurrent neural network training / Jaeger Herbert, Mantas Lukosevicius. – Elsevier, 2009. – pp. 127-149.