Назад в библиотеку
The Power Plant Voltage/Reactive Power
Regulator with an Adaptive Control Solution
Автор: S. Bittanti, S. Corsi, M. Pozzi and M. Zaramella
Источник: The Electrical Systems Planning Research Laboratory Presantation, http://www.labplan.ufsc.br...
Аннотация
S. Bittanti, S. Corsi, M. Pozzi and M. Zaramella. The Electrical Systems Planning Research Laboratory Presantation. Статья описывает теоритическую основу и математического моделирования адаптивных регуляторов, которые применяются для контроля напряжения и реактивной мощности энергосистемы, приминительно к многоуровненвой системе регулирования Итальянской энергосистемы
Description
In the new scenario of electrical energy competition and
ancillary services market, it has grown the need and interest
in developing and applying suitable real-time control systems
for the grid voltages and reactive powers regulation.
Even if the non-linear characteristics of a power system do
not generally compromise its operation control, they certainly
affect the dynamic performances and reduce the stability
margins of its control systems, including grid voltages and
reactive powers regulation. As well known, such a criticism
related to the non-linearities can be alleviated by adopting
advanced adaptive solutions [1÷4], which are able to improve
the control dynamic performances and to increase its stability
margins, mainly where conventional - constant parameters -
solutions may introduce limitation on power system operation.
In the following reference is made to ENEL project for the
application at national level of the coordinated transmission voltage control [5÷10], taken over by the Italian Independent
System Operator (GRTN) after energy market liberalization.
This control system is based on a hierarchical decentralized
solution (see Fig.1), with the aim to regulate the voltage of the
main HV busses (pilot nodes) through controlling in real-time
the reactive power resources which most influence those
buses. In this way it is possible to operate in security the
transmission network very close to the highest voltage limits,
through the real-time fast control of the main generators which
are automatically forced to their limits only when needed.
The pilot node voltage and related area of influence
voltages are controlled by a signal called "reactive power
level" (one for each area) supplied to the main power plants in
the area by an innovative Regional Voltage Regulator (RVR).
The closing of the real-time pilot node voltage control loop is
achieved by its control generators through a power plant,
microprocessor based, Voltage and Reactive Power Regulator,
(named REPORT), which directly operates on the set-points of
the Automatic Voltage Regulators (AVR) of the plant units.
The AVRs very fast control is called Primary Voltage
Regulation. The combination of the REPORT and RVR
apparatuses realizes the Secondary Voltage Regulation (SVR).
At a higher hierarchical level, the Tertiary Voltage Regulation
(TVR) co-ordinates in real-time and closed-loop, the actions of
the regional controllers, establishing the voltage pattern of the
pilot nodes and effecting slow corrections, in order to have a
better balance of reactive power generation among the areas.
The TVR task is to achieve an optimal compromise
between both the objectives to reduce the differences in the
actual and forecast pilot nodes voltage values (economy
reason) and to maintain a control margin in the operating
reactive power levels (security reason). A not real-time
Optimal Reactive Power Flow (ORPF) program, for the Losses
Minimization Control (LMC), computes the short-term
forecasting of optimal voltages and reactive levels taking into
account of the actual network estimated state.
The considered three levels are real-time, overlapped and
closed control loops which require a defined design of their
stability and dynamics. The coordination in space and time of
the different control loops is, in addition, a crucial design
aspect for a correct and stable dynamic performance of the
overall system, even in front of network contingencies. The
success of a hierarchical control solution depends in fact not
only on the way the pilot nodes and the control generators are
chosen, but mainly on the coordinated actions of the regulators
and on the robustness of each control loop stability.
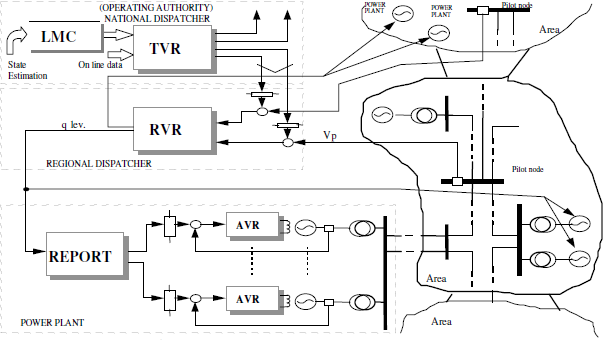
Fig. 1. Schematic diagram of the Italian hierarchical voltage control system.
According with this relevant objective, in the following the
REPORT conventional control scheme and regulation laws
(generator reactive power control loop and power plant high
side voltage control loop) are described in some detail, as
mainly concerns their possible innovation through a timely
control parameters adaptation algorithm, depending on the
interconnected network variations synthesized by changes in
the equivalent external reactance parameter XE. The aim is to
define a suitable adaptive control strategy, based on the
identification X*E of the external equivalent reactance, in such
a way the REPORT control parameters can be updated with
the purpose to maintain the different dynamics of the system
and their de-coupling unchanged. In the authors’ opinion this
aim is till now unexplored also because the strong interest for
the multilevel automatic HV control is somewhat recent.
A software code, based on a linearized model, has been
developed in Matlab-Simulink with the aim to reproduce the
REPORT adaptive control performances. Two different
algorithms for identification, based on the Recursive Least
Square (RLS) method and the Kalman Filter (KF) procedure,
are considered in the simulation code. The innovative aspect of
the proposed identification algorithms is the use of either a not
conventional trigger mechanism, which allows to run the
estimation procedure only when it is necessary for the system
("discontinuous identification"), or a linearized computing
method, which is the basis for the estimation process updating.
The REPORT Apparatus and Its Control Law
The REPORT apparatus, already applied to the main ENEL
power plants, has two different control modes, synthetically
shown by the block diagram in Fig.2. In the first control mode,
REPORT regulates the reactive power delivered by the power
plant generators, according with the reactive level signal sent
by the remote RVR. In the second control mode REPORT
operates the local high-side voltage regulation.
In both these control modes, the reactive power generated
by each unit is controlled by REPORT through a closed loop
which overlaps the primary voltage regulators AVRs.
In the following the local high-side voltage control mode is
mainly considered and tested, because inclusive of both the
overlapped control loops and of the dynamic interaction
among the power plant reactive control loops. Therefore its
analysis is the most meaningful, because all the mentioned
dynamics are involved and interested by the adaptive control.
In line of principle the same analysis is valid also for the RVR
pilot node voltage control loop, with the exception of the
telecommunications delays on either the pilot node voltage
measurement or the control signal sent to the power plants.
The REPORT control loops are of integral (I) type, in the
unit reactive power regulation (the inner loop), and of
proportional-integral (P-I) type, in the plant HV bus-bar
voltage regulation (the outer loop). These loops, if based on
conventional - constant parameters - solutions, are affected by
the power system non-linearities, making worse their dynamic
performances and reducing their stability margins in some
operating conditions, essentially corresponding to particular
values of some actual network parameters. A controllers
parameters adaptation, at both the inner and outer loops, can
instead avoid alterations of the different dynamics of the
system and maintain their de-coupling unchanged.
Because a simple Thevenin equivalent computation, based
on an external reactance (see next chapter), can be used for
describing the network seen from the power plant, then the
criticism related to the above described dependence on the
operating point can be alleviated defining a suitable algorithm
with control parameters adaptation based on the significant
parameter of this equivalent network.
Such adaptive control
strategy consists of timely identifying the external reactance
significant changes, in such a way the control parameters can
be updated in order to realize an adaptive algorithm.
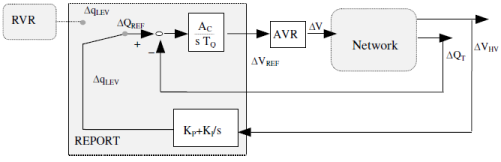
Fig. 2. REPORT apparatus and control system block diagram.
CONCLUSION
The paper describes an adaptive control solution for the
REPORT regulator which provides, at power plant level, the
generators reactive power control and the local high side
voltage regulation. The proposed innovation concerns a timely
identification and control parameters adaptation, depending on
the interconnected network conditions, synthesized by the
continuous change of the external reactance parameter. The
introduction of an adaptive control within the REPORT
control loops, as far concerns the implementation adopted and
the simulations carried out, has proven to be an effective way
to keep the system dynamics at their nominal design values,
also in presence of load modifications and grid perturbations,
so resulting very promising for practical