Регулирование скорости двигателя постоянного тока с использованием нейросети
Автор: Коротков А. В., ассистент, Улахович В. В., инженер
Источник: Публікації співробітників кафедри ЕАПУ.
Автор: Коротков А. В., ассистент, Улахович В. В., инженер
Источник: Публікації співробітників кафедри ЕАПУ.
Обьектом исследования в данной работе является злектропривод постоянного тока по системе тиристорний преобразователь - двигатель. Предмет исследования - система управлення злектроприводом постоянного тока с улучшенными динамическими показателями на основе нейросетей. Цель исследования - выявление возможности применения нейросетевмх методов в традиционных злектроприводах.
Для регулирования скорости злектропривода постоянного тока применяются системи подчиненного регулирования (СПР) [1]. Существуют различные способы получения в таких системах регулирования астатизма по управляющему воздействию, астатизма по возмущающему воздействию. Однако, как правило, повышение астатизма в таких системах приводит к уменьшению быстродействия. Неплохие показатели точности и быстродействия в СПР получаются в случае применения комбинированного управлення [2].
Однако в свете развития теории нейросетей и нейросетевмх методов управлення динамическими обьектами [3] возникла идея - попробовать симбиоз традиционных систем управлення и нейросетевмх методов.
Рассмотрим СПР скорости (рис. 1).
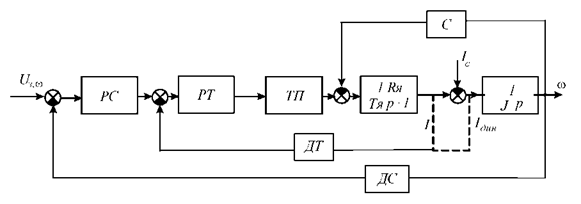
Рисунок 1 - Система подчиненного регулирования скорости
На рисунке 1 приняты следующие обозначения: РС - регулятор скорости; РТ - регулятор тока; ТП - тиристорный преобразователь; ДС - датчик скорости; ДТ - датчик тока; U3ω - сигнал задания на скорость вращения вала двигателя; ω - скорость вращения вала двигателя; I - полный ток двигателя; Іс - статический ток двигателя; Ідин - динамический ток двигателя; С – постоянная злектродвигателя; Rя - сопротивление якорной цепи; Тя - злектромагнитная постоянная времени якорной цепи; J - момент инерции двигателя и жестко связанных с ним масс.
Регулятор тока в данной системе - пропорционально-интегральный, а ре-гулятор скорости может быть, как пропорциональным, так и пропорционально- интегральным. Обратная связь по току может применяться, как по полному току І, так и по динамическому току Ідин.
Добиться астатизма по нагрузке в СПР можно применением пропорцио- нально-интегрального РС и обратной связи по полному току или пропорцио- нального РС и обратной связи по динамическому току. Определение полного тока двигателя не вызывает особых трудностей. Для того, что бм определить динамический ток двигателя необходимо знать параметры двигателя и вычис¬лять его в процессе работы системы. Здесь возможен иной подход для определения динамического тока двигателя - использовать нейромодель двигателя. Преимуществами такого подхода являются - отсутствие необходимости знання параметров двигателя и механизма, возможность переобучения нейронной сети в процессе работы, если изменились параметры объекта управления.
Для получения динамического тока двигателя можно использовать простейшую нейронную сеть, состоящую из одного нейрона, нескольких весовых коэффициентов по входным сигналам и смещения [4]. При этом необходимым условием нормального функционирования полученной нейромодели в динамических режимах является наличие необходимого количества задержек выходных сигналов. Это связано с тем, что нейронная сеть по своей природе - статический объект. На вход нейромодели необходимо подавать сигнал управления тиристорным преобразователем, а с выхода снимать сигнал, пропорциональный динамическому току двигателя, этот же сигнал после определенного числа задержек поступает на вход нейромодели. В соответствии с этим подготавливается обучающая выборка, состоящая из набора входных и выходных сигналов, затем необходимо произвести обучение нейронной сети по методу обратного распространения ошибки или одной из модификаций этого метода.
На рисунке 2 показаны переходные процессы (разгон, наброс и сброс нагрузки) в СПР скорости в случаях пропорционально-интегрального РС и обрат-ной связи по полному току (1), пропорционального РС и обратной связи по ди-намическому току, восстановленному нейромоделью (2). Здесь применено масштабирование токов и скоростей к их номинальным величинам, время при-ведено в долях постоянных времени тиристорного преобразователя. Как видно в случае (1) мы получаем астатизм по нагрузке, но проигрываем в быстродействии, а в случае (2) система достаточно быстродействующая и астатическая по нагрузке.

Рисунок 2 - Переходные процессы в СПР с различными обратными связями по току