Назад в библиотеку
Применение нейросети в системах управления электроприводами
Автор: Шелудько Д. И., студент; Коротков А. В., ассистент
Источник: Сб. науч. трудов 5-й междунар. научно-техн. конф. аспирантов и студентов "Автоматизация технологических объектов и процессов. Поиск молодых", Донецк, 2005, с.220-222.
Проблематика статьи и её решение
Объектом исследования в данной работе является электропривод (ЭП) постоянного тока по системе тиристорный преобразователь - двигатель (ТПД). Предмет исследования - система управления ЭП на основе нейросетей. Цель исследования - анализ возможности применения нейросетевых методов в системах управления ЭП.
Искусственная нейронная сеть (ИНС) представляет собой структуру, эле-ментарным функциональным модулем которой есть нейрон [1] . ИНС строится из множества связанных между собой нейронов.
На рисунке 1 показана математическая модель нейрона, где приняты следующие обозначения; х - входной сигнал нейрона, w0 - смещение, wi - вес i - той связи, f - активационная функция нейрона, z - выходной сигнал нейрона.
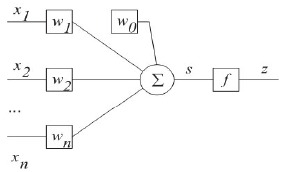
Рисунок 1 - Математическая модель нейрона
Выходной сигнал нейрона определяется следующим выражением:
Особенностью ИНС является ее способность к обучению (тренировке) - процессу, при котором свободные параметры нейронной сети адаптируются в результате ее непрерывной стимуляции внешним окружением, Обученная ИНС может быть использована при решении различных задач.
Практическое применение ИНС рассмотрим на примере прямой и обратной нейромодели системы ТПД. На рисунке 2 приведена структура ИНС прямой и обратной (инверсной) моделей.
Прямая модель [1, 2] предназначена для воспроизведения выходной координаты объекта управления Uвых(n) при подаче произвольного входного сигнала Uвх(n).
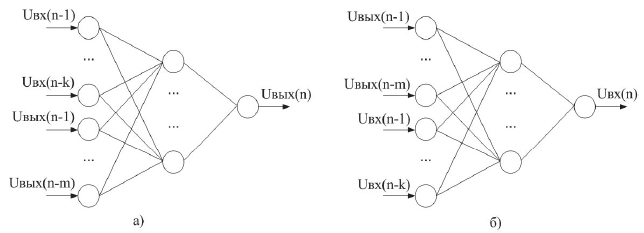
Рисунок 2 - Прямая (а) и обратная (б) модели объекта управления
Инверсная модель [1, 2] выполняет задачу обратную прямой, то есть вос-производит входной сигнал Uвх(n) при имеющемся выходном Uвых(n), При этом для лучшего воспроизведения динамических свойств объекта управления необходимо применять k задержек по входу и m задержек по выходу. Инверсная модель может быть поставлена последовательно с объектом управления для улучшения качества переходных процессов последнего при отработке задающего воздействия.
На рисунке 3 а приведены реакции синтезированной прямой нейромодели на скачок задающего воздействия при различном числе задержек сигнала задания и выходного сигнала. Откуда видно, что число задержек входных сигналов существенно не влияет на воспроизведение реакции объекта управления на скачок задания.
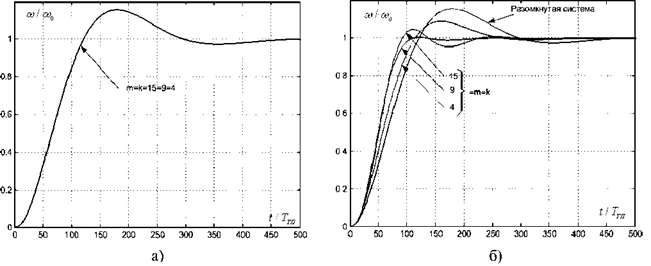
Рисунок 3 - Результат работы нейросети: а) прямая модель объекта управления, б) последовательное соединение инверсной модели и объекта управления
На рисунке 3 б показаны переходные процессы в системе ТПД, а также в системе, в которой последовательно с объектом управления включена инверсная модель для разного числа задержек входных (k) и выходных (m) сигналов нейросети, С точки зрения теории автоматического управления постановка обратной модели объекта в прямой канал последовательно с ним означает сведение передаточной функции всей системы к единице.
На рисунке 3 применяются следующие условные обозначения: ω/ω 0 - текущая частота вращения двигателя, в долях частоты вращения холостого хода, t /TТП - время в долях постоянной времени тиристорного преобразователя.
Как видим из рисунка 3 б, постановка инверсной нейромодели в канал управления увеличило быстродействие системы и уменьшило ее колебательность, причем оптимальный переходной процесс был получен для девяти задержек сигнала задания и выходного сигнала объекта управления.
В результате проведенных исследований, можно отметить как достоинства, так и недостатки использования нейросетевого подхода в системах управления электроприводами.
Достоинства:
- Получение модели объекта управления можно выполнять, не зная его параметров.
- Возможность воспроизведения выходного сигнала объекта управления при произвольном входном воздействии с использованием прямой нейромодели.
- Возможность улучшения качества переходных процессов в системе ТПД при включении инверсной нейромодели в прямой канал последовательно с объектом управления.
Недостатки:
- При использовании нейросетевых методов предъявляются повышенные требования к аппаратной и программной части системы управления.
- Для систем управления приводом постоянного тока отсутствует возможности ограничения тока якоря при использовании инверсной нейромодели в канале управления.
Список использованной литературы
- Комашинский В. И., Смирнов Д. А. Нейронные сети и их применение в системах управления и связи. – М.: Горячая линия - Телеком, 2002. - 94 с.
- Скляренко Е. Г. Системы регулирования электроприводов роботов с использованием нейромоделей // Проблемы автоматизированного электропривода. Теория и практика: Вестник ХГПУ. Специальный выпуск. – Харьков: ХГПУ, 1998 - с, 385 – 387.
