Аннотация
Борейко О.В.
Исследование робастной устойчивости с переменным периодом
дискретности . Исследовано моделирование системы 2
порядка.
Теория
автоматического регулирования как живая бурно развивающяся теория,
имеющая
прямое влияние на развитие производительных сил общества, приблизилась
к
решению многих сложных задач, решение которых еще до недавнего времени
было
немыслимым. С развитием средств связи и коммуникаций появилась
возможность
построения так называемых сетевых систем управления, в которых средой
передачи
информации от датчиков к регулятору и от него – к исполнительному
механизму
объекта управления является телекоммуникационная сеть, ресурсы которой
одновременно
используются многими участниками сети. В
результате известной неопределенности, вносимой телекоммуникационной
сетью
(задержки в передаче информации из-за коллизий в сети, потеря пакетов в
сетях с
пакетной передачей информации, джиттер и др.)
в системе автоматического управления объектом
ухудшается качество регулирования, изменяется
запас устойчивости, что может привести даже к потере устойчивости
системы.
Весьма актуальной задачей теории регулирования
является управление группой однородных объектов, которые в своей
совокупности
образуют единый объект, который в свою
очередь должен выполнить определенную задачу. Возникает необходимость
управления как объединенным объектом, так и отдельными его частями. Как
правило, это приводит к построению иерархической системы управления, в
которой
необходимо определять стратегию управления.
От выбранной стратегии управления
в конечном счете будет зависеть качество управления и
устойчивость как
системы верхнего уровня, так и качество
и устойчивость отдельных подсистем нижнего уровня. В ряде публикаций по
современным задачам теории управления приводятся и другие примеры объектов,
для которых задача синтеза
регуляторов и анализа устойчивости замкнутой системы регулирования может быть сведена к задаче оценки
устойчивости цифровой системы управления объектом с запаздыванием [1,
2, 3].
В то время как задача проектирования регуляторов
для объектов с постоянным запаздыванием решена (см. например, [4, 5]),
решение
задачи управления объектами с переменным во времени запаздыванием,
обусловленным различными причинами, все еще не доведено до
практического его
использования. Поэтому данная статья имеет своей целью изложить один из
подходов оценки устойчивости замкнутых систем регулирования объектами с
переменным (случайным) временем транспортного запаздывания. При этом
предполагается, что замкнутая система в результате
разумного выбора структуры и параметров
регулятора, спроектированного для
некоего номинального запаздывания, устойчива и соответствует
троебованиям к качеству
регулировния.
Для достижения этой цели необходимо раскрыть
механизм влияния переменного запаздывания на
устойчивость замкнутой системы регулирования, исследовать возможность
использования
теории робастных систем для оценки устойчивости систем управления
объектами с
переменным запаздыванием и выработать некоторые рекомендации по
методике оценки
робастной устойчивости рассматриваемого класса систем.
Для выяснения механизма влияния переменного
запаздывания на устойчивость замкнутой
системы рассмотрим одномерную цифровую систему управления объектом
второго
порядка с запаздыванием (выбор объекта второго порядка продиктован
стремлением
к большей наглядности изложения, а
последовательность рассуждений может
быть повторена для объекта любого порядка с любым разумным
запаздыванием).
Пусть передаточная функция непрерывного объекта
регулирования с запаздыванием имеет следующий вид:  .
.
Пусть далее запаздывание составляет целое число периодов
дискретности (в примере номинальное запаздывание принято равным двум
периодам
дискретности, , ).
Для заданного периода дискретности определена z-передаточная функция объекта 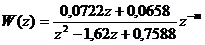 ,
и передаточная
функция регулятора
,
и передаточная
функция регулятора .
Переходный процесс в замкнутой системе (рис.1б) показывает,
что система устойчива, и качество управления достаточно хорошее.
Рассмотрим
далее, как будет меняться переходный процесс замкнутой системы при
изменении
запаздывания. На рис.1а приведена переходная функция в замкнутой
системе при
уменьшении запаздывания ровно на время одного периода дискретности.
Этого и
следовало ожидать: уменьшение запаздывания приводит к тому, что общий
запас
устойчивости по фазе увеличивается, колебательность уменьшается,
качество
регулирования улучшается. К прямо противоположному результату ведет
увеличение
запаздывания (рис. 1в, 1г)
.
Переходный процесс в замкнутой системе (рис.1б) показывает,
что система устойчива, и качество управления достаточно хорошее.
Рассмотрим
далее, как будет меняться переходный процесс замкнутой системы при
изменении
запаздывания. На рис.1а приведена переходная функция в замкнутой
системе при
уменьшении запаздывания ровно на время одного периода дискретности.
Этого и
следовало ожидать: уменьшение запаздывания приводит к тому, что общий
запас
устойчивости по фазе увеличивается, колебательность уменьшается,
качество
регулирования улучшается. К прямо противоположному результату ведет
увеличение
запаздывания (рис. 1в, 1г)
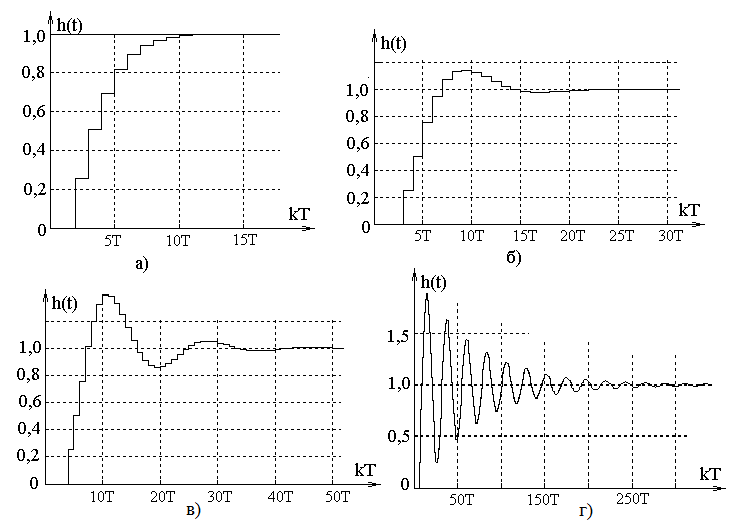
Рисунок 1. Переходные функции в
замкнутой системе
управления
объектом с запаздыванием: а)
запаздывание меньше
на один период
дискретности, б) номинальное
запаздывание, в)
увеличение запаздывания
на один период дискретности, г)
увеличение
запаздывания на 2 периода
дискретности
Потеря устойчивости системы
управления имеет место при увеличении времени запаздывания, которое
сохраняется
длительное время. В сетевых системах управления транспортное
запаздывание,
обусловленное коллизией в сети, может существенно измениться на короткое время. Приведет ли
кратковременное увеличение транспортного запаздывания к ситуации, когда
система
становится неустойчивой и неспособной обеспечить заданное качество
управления?
Возможно, при незначительном увеличении транспортного запаздывания сбой
в
системе передачи информации хотя и ухудшает качество регулирования, тем
не
менее не приводит к катастрофической потере устойчивости системы. Для
выяснения
характера изменения процессов в системе в среде Matlab/Simulink
создадим модель
замкнутой цифровой системы управления объектом c
переменным транспортным запаздыванием (рис. 2)
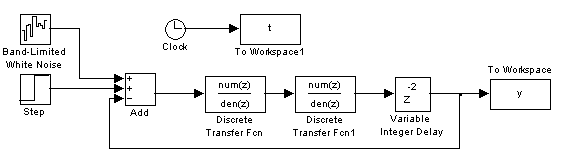
Рисунок 2 – Схема моделирования
замкнутой системы
управления
объектом с изменяющимся запаздыванием
Для моделирования
воспользуемся методом «сшивки»: сначала моделируется
система по рис.2 при
нулевых начальных условиях. После определенного времени (в примере
через 4
секунды) достигнутые значения величин на выходе регулятора, объекта и
звена
постоянного запаздывания передаются командой
set_param('fileName/Discrete
Transfer Fcn1','Initialstates','Value')
аналогичной
схеме, в которой реализуется уже другое запаздывание.
Моделирование второй схемы осуществляется в течение короткого времени,
соответствующего длительности «сбоя» в сети, например, в
течение четырех-шести
тактов дискретизации (напомним, что в ифровой системе запаздывание
указывается
в количестве периодов дискретизации). По окончании этого этапа
моделирования
значения переменных передаются исходной схеме, что означает
исчезновение
коллизии в сети и возвращение системы управления к номинальному режиму
работы.Результы моделирования иллюстрируются рис.3.
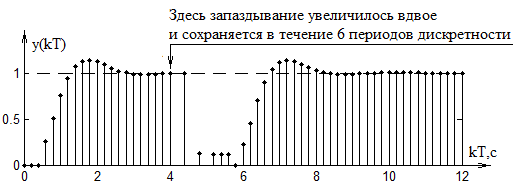
Рисунок 3 – Переходные процессы в
системе
регулирования объектом
с изменяющимся временем
транспортного запаздывания
Результат моделирования, представленный на рис.3,
может быть интерпретирован следующим образом. При значительном и
достаточно
длительном изменении времени запаздывания система регулирования теряет
устойчивость, регулятор не в состоянии принять решение об управлении
объектом
из-за длительного отсутствия информации о его состоянии. Очевидно, что
такая
ситуация будет только обостряться в случае «быстрого»
объекта, состояние
которого может существенно измениться даже за один-два периода
дискретности. С
восстановлением нормального режима работы (то есть с восстановлением
принятого
при расчетах запаздывания) система становится устойчивой и способной
обеспечить
заданное качество регулирования. Таким образом, остается открытым
главный
вопрос: что следует называть допустимым изменением времени запаздывания и как определить верхнюю границу времени
запаздывания, при которой сохраняется не
только устойчивость системы, но и качество регулирования.
Эффективным методом оценки границы изменения
параметров системы управления является метод, базирующийся на теории
робастных
систем. Если в рассматриваемом случае изменение времени запаздывания
приводит к
изменению передаточной функции объекта управления, то следует
передаточную
функцию объекта рассматривать как номинальную (для расчетного
запаздывания) и
некоторую неопределенность (аддитивную или мультипликативную), которую
создает
изменяющееся случайным образом
транспортное запаздывание. Воспользовавшись критерием робастной
устойчивости системы можно найти наименьшую допустимую ошибку в
определении
передаточной функции объекта с запаздыванием, а по ней – верхнюю
границу
запаздывания.
С другой стороны, зная передаточную функцию
регулятора и номинальную передаточную функцию объекта с запаздыванием,
можно
исследовать поведение корней характеристического уравнения замкнутой
системы в
зависимости от запаздывания (рис.4).
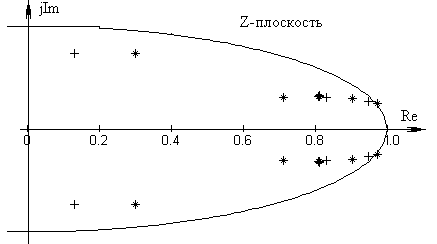
Рисунок 4 – Расположение корней
характеристического уравнения (фрагмент)
в зависимости от величины транспортного
запаздывания
Как следует из рис.4 при увеличении транспортного
запаздывания два корня приближаются к границе устойчивости, и при
запаздывании,
составляющем для рассматриваемого примера 6 периодов дискретности,
система
теряет устойчивость. Таким образом, при наличии современных
вычислительных
средств достаточно просто может быть промоделировано кратковременное
увеличение
транспортного запаздывания, а также проведена оценка допустимого
транспортного
запаздывания, при котором система сохраняет устойчивость.
Список
использованной литературы
1. Amos,
Albert:
Comparison of Event-Triggered and Time-Triggered Concepts
with Regard to Distributed Control
Systems. Embedded World 2004,
N¨urnberg,
17.–19.02.2004
pages 235–252
http://www.bosch-semiconductors.de/media/pdf_1/canliteratur/embedded_world_04_albert.pdf
2. J¨org Fischer, Achim Hekler, and
Uwe D. Hanebeck
State Estimation
in Networked Control
Systems. Intelligent Sensor-Actuator-Systems Laboratory (ISAS),
Institute for
Anthropomatics, Karlsruhe Institute of Technology (KIT), Karlsruhe, Germany,
http://isas.uka.de/Publikationen/Fusion12_Fischer.pdf
3. Системы
автоматического
управления с запаздыванием :
учеб.пособие / Ю.Ю. Громов, Н.А. Земской, А.В. Лагутин, О.Г. Иванова,
В.М.
Тютюнник. – Тамбов : Изд-во Тамб. гос. техн. ун-та, 2007. –
76 с.
4. Клюев, А.С.
Синтез
быстродействующих регуляторов для
объектов с запаздыванием / А.С. Клюев, В.С. Карпов. – М.:
Энергоатомиздат,
1990. – 176 с.