Назад в библиотеку
Узагальнена структура системи контролю функціонування шахтної поідйомної машини
Автор: Дряпочка М.О., студент; Василець С.В., доц., к.т.н.
Источник: Автоматизація технологічних об’єктів та процесів. Пошук молодих / Збірник наукових праць XIII науково-технічної конференції аспірантів та студентів в м. Донецьку 14–17 травня 2013 р. – Донецьк, ДонНТУ – 2013, с. 20-21.
Аннотация
Дряпочка М.О., студент; Василець С.В., доц., к.т.н. – Узагальнена структура системи контролю функціонування шахтної поідйомної машини Розглянут процес підйому як об`єкт автоматизаціі та спроєктована структурна схема системи автоматичного контролю
Підіймальні установки шахт і копалень – найбільш складні і відповідальні об'єкти в загальному технологічному ланцюзі транспортування корисної копалини із забою на поверхню. Складність їх обумовлена тим, що електрична схема підіймальної машини повинна виконувати безліч контрольних і захисних функцій і забезпечувати автоматичне управління потужним приводом постійного або змінного струму при значному, змінному по рівню навантаженні для підтримання з великою точністю заданої швидкості судини на всіх ділянках його руху.
В результаті автоматизації підйомов їх продуктивність зростає у середньому на 10% за рахунок скорочення циклу підйома й усунення впливу кваліфікації машиніста. Скорочення циклу підйома дозволяє скоротити споживання електроенергії у середньому на 12%, а перехід на автоматичне керування й покращення профілактичного обслуговування дають можливість скоротити споживання на матеріали й запасні частини у середньому на 20%.
Нормальна робота підіймальної установки забезпечується апаратурою управління, захисту, контролю і регулювання. Низьковольтну електромагнітну і електричну апаратуру управління і контролю електроприводів встановлюють на станції управління. Різноманітні датчики управління і захисту встановлюють у відповідних місцях підіймальної установки.
Використання цифрових датчиків та засобів мікропроцесорної техніки для обробки та передачі інформації дозволяє з високою точністю контролювати достатню кількість параметрів шахтної підйомної машини, передавати дані на пульт диспетчера та на верхній рівень системи автоматизації, зберігати показання датчиків за тривалий період та аналізувати характер їх зміни у часі.
Задача статті – обгрунтувати структуру системи автоматичного контролю функціонування шахтної підйомної машини, яка дозволяє передавати дані про її роботу на пульт оператора та головного диспетчера.
На структурній схемі приведена схема обгрунтування структури пристрою контролю функціонування шахтної підіймальної машини. Виходячи з того, що інформацію безпосередньо з об'єкту необхідно передавати на велику відстань, той пристрій складатиметься з двох частин (мал. 1): 1 – частина, що знаходиться безпосередньо в машинному залі; 2 – частина, розташована на пульті діспетчера. На структурній схемі приведені наступні позначення: ДН – датчик напруги (наприклад, типа LV–25P), ДТ – датчик струму (наприклад типа ТМ–0,66, ТМД–0,66, ДТ424, ДТ124), ДТО – датчик температури електроприводу (наприклад типа ТСП9501, ТСМ9501, ТСП9502), ДВ – датчик вібрації (наприклад типа VSA), BR – тахогенератор (наприклад ТГП–5, ТП20–4–0,2), БКВ – блок контролю напряму обертання барабана підіймальної машини, БП1, БП2 – блоки живлення, АЦП – аналого – цифровий перетворювач, МК – мікроконтроллер, ЖКИ – елемент рідкокристалічної індикації. Принцип дії пристрою полягає в наступному: на барабан розташовується блок контролю напряму обертання барабана, що складається з магнітної мітки, розташованої безпосередньо на барабані і двох герконів, які при спрацьовуванні передають інформацію на мікроконтроллер. Датчики струму і напруги призначені для контролю електроприводу від перенагрузки і запобігання його роботі на низькій напрузі. Сигнал з даних датчиків передається на мікроконтроллер через пристрій гальванічної розв'язки та аналого – цифровий перетворювач. Сигнал з інших пристроїв передається на мікроконтроллер через пристрої узгодження, звідки далі по лінії зв'язку (А – В) через інтерфейс RS485 передається на мікроконтроллер і на рідкокристалічний дисплей на пульті диспетчера. Всі елементи живляться трансформаторним блоком живлення. У якості пристрою контролю використовується мікроконтроллер Atmel Mega 16.
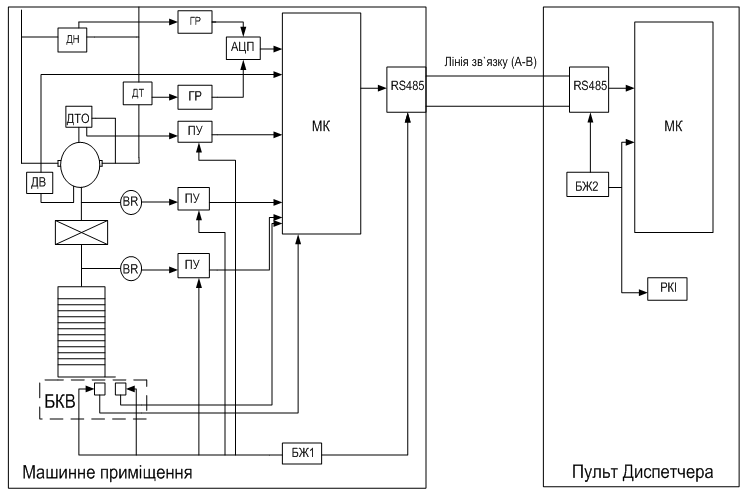
Рисунок 1 – Структурна схема пристрою контролю функціонування підіймальної машини
Таким чином було спроектовано пристрій контролю функціонування шахтної підіймальної машини, яке дозволяє контролювати основні технологічні параметри процесу. Пристрій може функціонувати як самостійно, так і у складі системи автоматизації.
Перелік посилань
1. Завозін Л.Ф. – Шахтные подъемные установки. Изд. 2–е, переработ. и доп.– М.:, «Недра», 1975, 368 с.
2. Гутніков В.С. – Интегральная электроника в измерительных устройствах. – Л.: Энергия. Ленингр. отд–ние, 1980. – 248 с., ил.
3. Евстифеєв А.В. – Микроконтроллеры AVR семейств Tiny и Mega фирмы ATMEL, 5–е изд., стер. – М.: Издательский дом «Додэка–XXI», 2008. – 560с.
4. Рюмик С.М. – 1000 и 1 микроконтроллерная схема, 1–е изд. – М.: Издательский дом «Додэка–XXI», 2010.