Аннотация
Рассмотрены вопросы дистанционного управления электротехническими комплексами преимущественно беспроводного типа. Приведена классификация подземных систем БДУ по виду канала передачи информации.
1. Роль и место систем управления в составе электротехнического комплекса
Современное понятие электротехнического комплекса достаточно сложно, обширно и включает в себя электротехническое и элек- тромеханическое оборудование, объединенное различными системами, основные из которых – это системы управления и контроля, силовая часть привода.
Наиболее полно возможный состав электротехнического комплекса и его систем, в современном представлении, изложен в исследованиях И.В. Брейдо, П.И. Сагитова и Б.Н. Фешина. В соответствии с этими представлениями и классификацией, на современном этапе развития техники недостаточно подразделять электротехническое, электромеханическое оборудование и системы электротехнического комплекса на силовую и информационную части, как это было принято ранее. Условность такого деления связана с тем, что широкое внедрение полупроводниковой техники, создание новых способов и средств преобразования электрической энергии, использование новых материалов, качественное изменение методов и средств управления и регулирования, обусловленное интенсивным развитием и внедрением компьютерных и микропроцессорных систем и разработкой новых информационных технологий, размывает ранее существующие четкие границы между силовым и управляющим каналами электротехнических комплексов и систем. Расширились представления и о подсистемах, в том числе входящих в состав силовой части электромеханических систем. Примером могут служить исследования и разработки взаимосвязанных электроприводов технологических линий и комплексов, исследования и разработки в области мехатроники и супервизорных многосвязных систем управления автоматизированными электроприводами.
В соответствии с классическим определением система управления – это совокупность управляемого объекта и устройства управления (комплекс средств сбора, обработки, передачи информации и формирования управляющих команд), действие которой направлено на поддержание или улучшение работы объекта.
Системы управления электротехническими комплексами, включая и системы электроснабжения, электроприводы, электромеханические и мехатронные установки и системы, традиционно также делятся на автоматические (работающие без участия человека, по заданному алгоритму) и автоматизированные (работающие с участием человека, являющегося самостоятельным звеном управления).
Достижения силовой полупроводниковой электроники, микропроцессорной и компьютерной техники, информационных технологий практически сняли ограничения на сложность и техническую реализуемость систем управления. По существу, современные системы управления и регулирования представляют собой интегрированные программно-аппаратные комплексы, обеспечивающие на основе единых подходов и унифицированной элементной базы решение всего круга задач управления, регулирования и контроля. Место, состав и границы подсистем, образующих системы управления, можно установить, определив их функции и взаимодействие с другими подсистемами электротехнических комплексов.
В обобщенном виде СУ ЭТС может содержать СПИ, СОИ, СФУК, средства и системы контроля (СК), СФУВ, имитационные модели (ИМ), прогнозирующие модели (ПМ)
и другие средства. Принципы построения систем и подсистем управления, алгоритмы их функционирования, технические решения определяются не только
вышеизложенными факторами, но и техническими средствами, применяемыми для реализации силового канала. Характерным примером являются системы
дистанционного управления, особенно локальные системы беспроводного управления, где, в случае применения тиристорного электропривода в силовой части ЭТК,
возникают специфические проблемы, связанные с большим уровнем помех и требованиями безопасности, по которым управление должно осуществляться в пределах
прямой видимости с постоянным контролем канала управления, при возможном наличии нескольких аналогичных систем по соседству. Ситуация еще более
усложняется, если объекты управления находятся в подземных условиях, например, если объектами управления являются угольный комбайн, скребковый конвейер
или насосная станция с тиристорными электроприводами и другие устройства, да еще и объединенные в ЭТК. Известные методы и средства управления
подобными ЭТК, из-за противоречивых и специфических требований к системе управления, ограничены и не позволяют в должной мере решить все проблемы по
управлению. В результате возникает научная проблема создания и разработки локальной дистанционной системы управления электротехническими комплексами
с тиристорными электроприводами для подземной добычи угля, являющейся неотъемлемой частью электротехнического комплекса и содержащей ранее неизвестные
принципы и средства передачи и обработки информации. Актуальность этой проблемы увеличивается в связи с неудавшейся попыткой создания так называемой
«безлюдной выемки угля», предпринятой в конце семидесятых – восьмидесятых годов прошлого столетия.
В процессе проведенных исследований было установлено, что пока роль человека-оператора в шахтных условиях, на фронте технологического процесса,
чрезвычайно велика и именно системы локального управления нижнего информационного уровня и связывают человека-оператора с верхним уровнем системы
управления и интегрируют его в электротехнический комплекс, образуя, таким образом, полноценную систему автоматизированного управления
технологическим процессом.
2. Методы построения локальных подземных систем дистанционного управления
Ранее было показано место систем локального
управления нижнего уровня в структуре ЭТК и сделан вывод, что в этой части системы управления имеется научная проблема, заключающаяся в том, что
необходимо включить человека-оператора в контур управления ЭТК. В подземных условиях от правильного решения этой проблемы зависит не только (и не
столько) производительность труда оператора, сколько его безопасность и безопасность работающих рядом с ним людей.
Здесь необходимо отметить особенности
среды, в которой происходит функционирование рассматриваемой системы управления и которые значительно влияют на разработку эффективной системы локального
управления. Прежде всего, подземные системы управления, большинство которых тем или иным образом связаны с добычей угля, должны быть взрывобезопасными
(искробезопасными). Это накладывает значительные ограничения на уровень используемой электрической мощности и реактивные параметры используемых
технических устройств. Кроме этого, локальные системы этого типа должны предоставлять возможность оператору активно участвовать в технологическом
процессе и обеспечивать его подвижность в технологической зоне, то есть системы должны быть дистанционными. Но, с другой стороны, система
дистанционного управления (СДУ), по требованиям безопасности, должна функционировать только в пределах прямой видимости и обеспечивать непрерывный
контроль оператора над объектом управления с возможностью аварийного отключения за нормативное время. К этому следует добавить, что сама
технологическая среда, в которой должно происходить функционирование системы локального дистанционного управления для подземных объектов, содержит
большое количество металлических конструкций с изменяющейся конфигурацией, обладает большой запыленностью и насыщена большим количеством разнообразного электрооборудования,
включая и системы связи и телемеханики. При этом должна выдерживаться электромагнитная совместимость с другими подсистемами управления и отсутствовать возможность несанкционированного
запуска и управления с аналогичных систем, расположенных вне технологической зоны управления объектом.
Многопроводные СДУ, по причине несложности их реализации, традиционно широко применяются для управления различными объектами, в том числе и подземными. Однако системы управления,
содержащие многожильный кабель, уже при количестве команд управления, превышающем десяток, и длине кабеля более 10 м становятся тяжелыми, громоздкими, малонадежными и даже опасными
в подземных условиях из-за возможности зацепления кабеля за стойки крепи и другие элементы горной техники. Это приводит к тому, что несмотря на наличие выносного пульта управления такими
объектами, например, как очистной комбайн, реально пульт дистанционного управления крепится к корпусу комбайна и используется как пульт местного управления, то есть на практике функция
дистанционного управления подвижным объектом, в большинстве случаев, не реализуется, из-за опасности получения травм при пространственных эволюциях объекта. В то же время, в результате
некоторых исследований установлено, что применение дистанционного управления горными машинами (например очистным комбайном) способствует снижению травматизма до 11%, а извлечение
полезных ископаемых увеличивается на 10–20 %. Облегчить ситуацию, а также значительно увеличить дальность дистанционного управления за счет снижения массы кабеля можно, применяя,
как уже отмечалось, различные методы разделения и уплотнения информационных каналов. Исследования, проведенные в этой области с участием автора, позволили получить ряд оригинальных
технических решений, применение которых, однако, ограничено специализированными малораспространенными объектами. Для большинства объектов управления, содержащих один или несколько
тиристорных электроприводов, наиболее актуальна задача локального управления на небольшом расстоянии 10–15 м, ограниченном прямой видимостью объекта и требованиями безопасности.
Для некоторых горных машин эти требования вошли в нормативные документы, например, в п.2.6 ГОСТ11986–83. При указанных условиях, с учетом упомянутых недостатков проводных систем
управления, альтернативой этим системам являются беспроводные системы управления, наиболее известными из которых являются системы радиоуправления . Для беспроводных систем,
действующих на малых расстояниях (от единиц до сотен метров), был даже предложен специальный термин «радиосистемы ближнего радиуса действия» (РБД), но в рассматриваемой ситуации
этот термин некорректен из-за существования систем индукционного управления , в которых отсутствуют явления формирования радиоволн, поэтому для обозначения и
характеристики систем малого радиуса действия (как правило, эксплуатируемых в пределах прямой видимости) более уместным является термин «системы локального управления».
3. Беспроводные системы дистанционного управления для подземных условий
Для реализации беспроводного дистанционного управления (БДУ) в принципе могут использоваться следующие виды энергии:
– энергия акустических колебаний
(звуковые и ультразвуковые);
– энергия светового излучения;
– энергия электрического, магнитного, электромагнитного полей.
Однако, так как задача дистанционного управления в рассматриваемом случае решается для системы «человек-машина», работающей в основном в подземных условиях угольных шахт,
на источник энергии управления налагаются дополнительные ограничения, основные из которых: искро– и взрывобезопасность; безвредность для человека при
длительном воздействии; высокая проникающая способность (для исключения «мертвых зон», где управление невозможно); возможность близкого к изотропному
излучению энергии с пульта, находящегося у оператора.
Пик интенсивности исследований систем БДУ для подземных условий и их аппаратная реализация и испытания, пришлись на восьмидесятые годы прошлого столетия.
Научные исследования в этой области привели к тому, что ведущие зарубежные фирмы остановили свой выбор на системах радиоуправления сверхвысоких частот, чему в немалой степени
способствовали технические успехи радиосвязи в области создания сотовых телефонов и средств мобильной связи, а также более лояльные санитарные нормы безопасности на высокочастотное
излучение. При этом используется два основных варианта передачи энергии управления. Во-первых – непосредственно через технологическую среду, что в горных условиях в протяженных
выработках, насыщенных металлом, уже на небольших расстояниях, приводит к появлению «мертвых зон», из которых управление невозможно, и в то же время неконтролируемое распространение
энергии возможно на значительные расстояния, в том числе и в соседние выработки.
На основе анализа состояния вопроса в области дистанционного управления электротехническими комплексами можно сделать следующие выводы:
1. Cистемы дистанционного управления, в том числе и беспроводные, являются неотъемлемой частью электротехнического комплекса;
2. Основными видами систем беспроводного управления по типу используемой энергии управления являются оптические, радиосистемы и индукционные системы;
3. Применение в подземных системах управления оптических систем невозможно, а радиотехнических систем затруднено из-за особенностей распространения электромагнитной энергии
в подземных выработках, содержащих большое количество металлических конструкций и обладающих значительной запыленностью, а также из-за требований искробезопасности и взрывобезопасности
и проблем с биологическим воздействием на персонал;
4. В подземных условиях перспективно применение индукционных систем беспроводного управления из-за большой проникающей способности магнитной компоненты электромагнитного поля
подобных систем и способности к локализации энергии управления в непосредственной близости от индуктора;
5. Основными проблемами при создании индукционных систем управления являются обеспечение невосприимчивости к помехам от электрооборудования электротехнических комплексов,
особенно от тиристорного электропривода, и выбор рациональной рабочей частоты, которая зависит от необходимой дальности работы системы ;
6. В области систем управления электротехническими комплексами с тиристорным электроприводом существует проблема исследования, создания и разработки систем подземного
беспроводного индукционного управления без использования специализированных направляющих, а также инженерной методики их расчета.
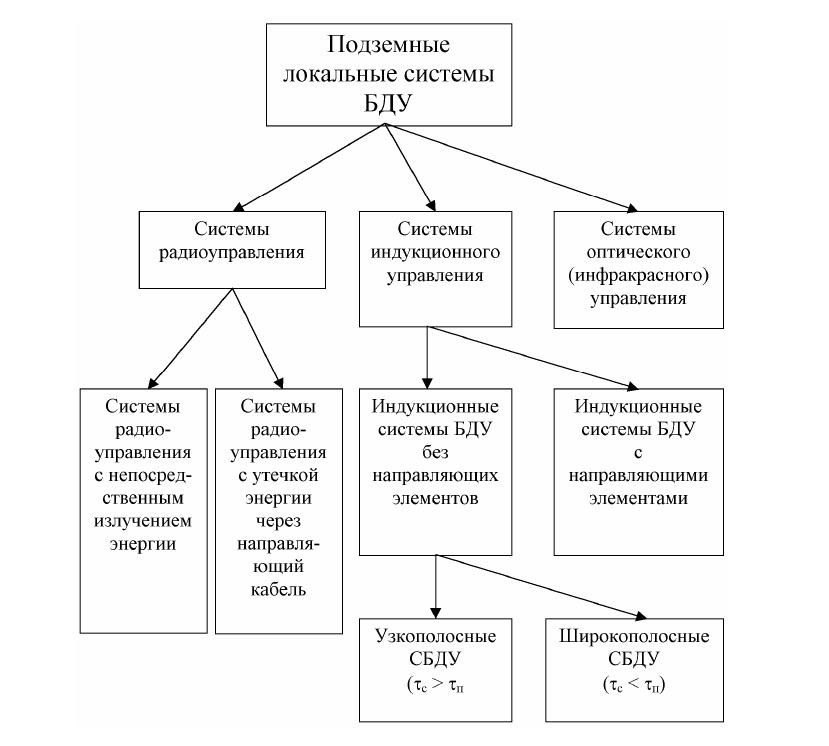
Рис. 2. Классификация подземных систем БДУ по виду канала передачи информации
ЛИТЕРАТУРА
1. Брейдо И.В., Сагитов П.И., Фешин Б.Н. Классификационные признаки систем управления электротехническими комплексами и системами / КарГТУ // Труды университета.– 2002.– № 1.– С. 55–57.
2. Брейдо И.В. Структурно–параметрическая оптимизация управляемых электроприводов подземных подвижных машин: Дис. … д–ра техн. наук. – Екатеринбург, 1996. – 270 с.
3. Фешин Б.Н. Супервизорные многосвязные системы управления автоматизированными электроприводами горнодобывающих машин: Дис. … д–ра техн. наук. – Алматы, 2001. – 274 с.
4. Советский энциклопедический словарь / Под ред. А.М. Прохорова.– 3–е изд.– М.: Сов. энциклопедия, 1984.– 1600 с.
5. Сердюк А.А., Мищенко Н.А., Олейник Н.М. Эффективность применения аппаратуры автоматизации забойного оборудования // Забойная автоматика: Сб. научн. тр. – М., 1985. – С. 89–94.