Загальна постановка проблеми
Сушильний агрегат, як об'єкт
управління має багато вхідних і вихідних технологічних параметрів, які
в тій чи іншій мірі використовуються для управління об'єктом і для
контролю його функціонування. Головними технологічними керованими
величинами сушильного агрегату є продуктивність і вологість продукту на
виході агрегату. Для підтримки процесу сушіння в оптимальному режимі
потрібно підтримувати співвідношення газ / повітря в пальнику.
Розглянемо технологію сушіння з
точки зору управління процесом. У процесі роботи сушильного агрегату на
нього діють керуюча величина (подача газу), обурення (швидкість подачі
вологого матеріалу в піч) та інші впливи такі, як подача повітря для
підтримки необхідної температури сушильного агента і для оптимального
горіння топки. Продуктивність сушарні, як головна вхідна величина і
головна вихідна величина, є з точки зору управління сушкою, обуренням.
Вологість матеріалу на вході також є обуренням, так як вона не може
регулюватися при управлінні безпосередньо сушильним агрегатом.
Управління продуктивністю
сушильного агрегату здійснюється САР з жорстким управлінням (рис. 1).

Рисунок
1. Система управління сушильним агрегатом
Система управління сушильним
агрегатом складається з декількох САР та систем контролю. У тому числі:
- зовнішня САР управляє
продуктивністю агрегату. У даному випадку це розімкнена САР з жорстким
управлінням. Розімкнена САР продуктивності з жорстким управлінням в
даному випадку не враховує реальні значення вологості на вході і
виході. Тому продуктивність задається по суті темпом завантаження
матеріалу, т.зв. «продуктивністю за входом».
Реальна продуктивність буде відрізнятися від темпу завантаження на
величину випаруваної в сушарні вологи;
- головна САР підтримує
вологість матеріалу на виході на заданому оператором рівні;
- допоміжна САР управляє
співвідношенням газ / повітря, забезпечуючи оптимальні умови для
згоряння газу.
Таким чином, система управління
сушильним агрегатом, що представляє собою багатовимірний багатозв'язний
об'єкт, може бути побудована у вигляді ієрархічної структури, що
складається з паралельно, одночасно працюючих і пов'язаних САР.
Зовнішньої, стосовно процесу сушіння, є САР продуктивності, завдання
для якої визначається оператором чи технологією. Решта САР забезпечують
якість процесу сушіння. Головна з них забезпечує необхідну вологість
матеріалу на виході. Допоміжна - оптимізує процес горіння та сушіння. В
цьому випадку розробляється математична модель об'єкта по кожному
каналу і проводиться оптимізація параметрів елементів контурів так
само, як це робиться для об'єкта з однієї керуючої і однієї керованої
величинами. Оцінюється перехресний вплив керуючих величин при
паралельній роботі всіх САР і, при необхідності, уточнюються
налаштування регуляторів, виключаючи потенційну можливість переходу САР
в нестійкий стан.
Процеси сушіння відносяться до
об'єктів з елементами запізнювання. Синтез систем управління сучасними
методами синтезу потребує опис моделі в термінах змінних стану. Тому
при описі математичної моделі в термінах змінних стану необхідно
враховувати те, що кожна змінна стану вихідної моделі може бути
затримана на деякий час відповідною ланкою запізнювання. Таким чином,
мета статті полягає в моделюванні об'єкту з ланками запізнювання в
просторі змінних стану за рахунок модифікації операторної матриці і
матриць рівнянь стану об'єкту без запізнювання.
Методика рішення задачі
Динаміка процесу сушіння
визначається двома факторами: часом проходження сушильного газу, що
представляє собою суміш процесів горіння з додаванням стороннього
повітря, і часом переміщення концентрату по довжині сушильного
барабана. При ступінчастій зміні керованої величини, тобто подачі газу,
протягом 80 сек. фронт зміни температури осушувальних газів пройде
уздовж печі. Це може бути промоделювати запізненням на 80 сек. Лінійна
динамічна модель по каналу управління являє собою послідовне з'єднання
ланки запізнювання і аперіодичної ланки. Перехідну характеристику по
каналу обурення, з реакції сушильного агрегату на ступеневу зміну
подачі концентрату, можна задати як результат чистої затримки, яка
дорівнює 150 сек. [1].
Опишемо об'єкт управління
попередньо виключивши з нього ланки запізнювання, замінивши їх прямими
жорсткими зв'язками [2, 3]. У цьому випадку об'єкт без запізнювання
може бути описаний в традиційній формі Коші (1):
 (1)
(1)
Перше матричне рівняння в
системі (1) може бути записано в наступному вигляді:
 (2)
(2)
де L – матричний
оператор диференціювання:
 (3)
(3)
Доповнимо набір змінних стану
рівняння (2) таким же числом змінних стану, відповідних вихідним
сигналам ланок запізнювання:
 (4)
(4)
де  - формальний матричний
оператор
диференціювання:
- формальний матричний
оператор
диференціювання:
 (5)
(5)
У матриці (5)
коефіцієнт  дорівнює одиниці, якщо ланка запізнювання для деякої змінної стану є, і
дорівнює нулю, якщо таке відсутнє. Оператор дорівнює одиниці, якщо
ланка запізнювання для деякої змінної стану є, і дорівнює нулю, якщо
таке відсутнє. Оператор
дорівнює одиниці, якщо ланка запізнювання для деякої змінної стану є, і
дорівнює нулю, якщо таке відсутнє. Оператор дорівнює одиниці, якщо
ланка запізнювання для деякої змінної стану є, і дорівнює нулю, якщо
таке відсутнє. Оператор  описує
значення функції, випереджаюче за часом поточне на інтервал τ.
Операторна матриця отримана з
вихідної операторної матриці L шляхом додавання рядків відповідних
затримок за часом вихідних змінних стану [4,5]. Праворуч матриця
доповнена такою ж кількістю нульових стовпців. Оскільки може бути, що
не всі вихідні змінні стану затримуються, що відповідає = 0, то ці
рядки і стільки ж нульових стовпців праворуч виключається з кінцевої
операторної матриці.
описує
значення функції, випереджаюче за часом поточне на інтервал τ.
Операторна матриця отримана з
вихідної операторної матриці L шляхом додавання рядків відповідних
затримок за часом вихідних змінних стану [4,5]. Праворуч матриця
доповнена такою ж кількістю нульових стовпців. Оскільки може бути, що
не всі вихідні змінні стану затримуються, що відповідає = 0, то ці
рядки і стільки ж нульових стовпців праворуч виключається з кінцевої
операторної матриці.
Матриця внутрішніх зв'язків між
змінними стану об'єкта з урахуванням ланок запізнювання приймає вигляд:
 (6)
(6)
У компактному вигляді матриці
(5) і (6) можна представити так:
 (7)
(7)
Матриця  тепер
повинна містити стільки ж рядків, як і матриці та
тепер
повинна містити стільки ж рядків, як і матриці та  . Оскільки до
вихідних «інерційних» змінних стану були додані
«запізнілі» змінні стану, то слід модифікувати і
рівняння виходу:
. Оскільки до
вихідних «інерційних» змінних стану були додані
«запізнілі» змінні стану, то слід модифікувати і
рівняння виходу:
 (8)
(8)
Матриця  тепер
повинна містити стільки ж стовпців ,
як і матриці та , їх число дорівнює
числу змінних стану.
тепер
повинна містити стільки ж стовпців ,
як і матриці та , їх число дорівнює
числу змінних стану.
Для нашого об'єкта управління
за допомогою Matlab отримаємо матрицю внутрішніх зв'язків:
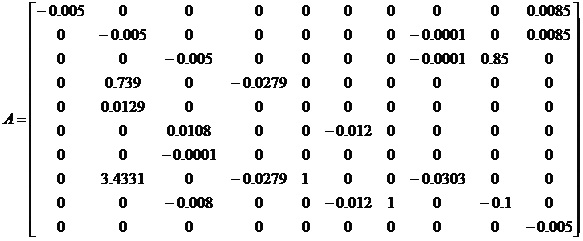 (9)
(9)
Оскільки контур регулювання
співвідношення газ/повітря не має запізнювання, то тільки
коефіцієнт  = 0, і матриця
коефіцієнтів запишеться у вигляді:
= 0, і матриця
коефіцієнтів запишеться у вигляді:
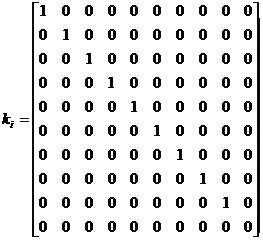 (10)
(10)
Номінальна продуктивність печі
сушки концентрату 100 т/год. При номінальній подачі матеріалу в сушарку
і за номінальною вологістю концентрату на вході в 40% потрібно, щоб
вологість концентрату на виході становила 3%. Із технологічних умов
випливає, що для забезпечення оптимального процесу сушіння необхідно
підтримувати в пальнику значення співвідношення газ/повітря рівне 1.
Результати моделювання системи
управління, наведені на рис.1, здійснювались в пакеті прикладних
програм Matlab з урахуванням оператора запізнювання Fwd. В якості
закону регулювання обраний ПІД-закон. Результати моделювання у вигляді
перехідних процесів, наведені на рис. 2, рис. 3 и рис. 4. Ці процеси
відповідають заданим умовам.

Рисунок
2. Кількість сухого матеріалу, т

Рисунок
3. Вологість матеріалу, %

Рисунок
4. Співвідношення газ/повітря, відн.од.
Висновки
У результаті введення оператора Fwd, рівняння стану об'єкта із
затримками приймають ту ж саму традиційну форму. Однак розмірність
матриць збільшується на число змінних стану, відповідних ланкам
запізнювання в об'єкті. Рівняння стану з урахуванням запізнювання
відображають всі фундаментальні інерційно-динамічні і просторово-часові
властивості безперервних лінійних фізичних об'єктів, включаючи як
динамічні їх властивості, так і просторову протяжність об'єктів та
пов'язані з цим затримки в поширенні сигналів. Матриця A відображає
фізичні зв'язки всередині об'єкту.
Бібліографічні посилання
1. Федосов Б.Т. Многомерные объекты. Описание, анализ и управление.
Рудный, 2010.
2. Ким Д.П. Теория автоматического управления. Т.2. Многомерные,
нелинейные, оптимальные и адаптивные системы: Учеб. Пособие. –
М.: ФИЗМАТЛИТ, 2004. – 464 с.
3. Ким Д.П. Сборник задач по теории автоматического управления.
Многомерные, нелинейные, оптимальные и адаптивные системы. – М.:
ФИЗМАТЛИТ, 2008. – 328 с.
4. Гурецкий Х. Анализ и синтез систем управления с запаздыванием.
– М.:Машиностроение, 1984. – 329с.
5. Ю.Ю. Громов и др. Системы автоматического управления с
запаздыванием. – Тамбов. :Издательство ТГТУ, 2007.