Р. С. Рутман
Автоматическое управление в технике, совокупность действий, направленных на поддержание или улучшение функционирования управляемого объекта без непосредственного участия человека в соответствии с заданной целью управления. А. у. широко применяется во многих технических и биотехнических системах для выполнения операций, не осуществимых человеком в связи с необходимостью переработки большого количества информации в ограниченное время, для повышения производительности труда, качества и точности регулирования, освобождения человека от управления системами, функционирующими в условиях относительной недоступности или опасных для здоровья (см. Автоматизация производства, Автоматизация управленческих работ, Большая система). Цель управления тем или иным образом связывается с изменением во времени регулируемой (управляемой) величины — выходной величины управляемого объекта. Для осуществления цели управления, с учётом особенностей управляемых объектов различной природы и специфики отдельных классов систем, организуется воздействие на управляющие органы объекта — управляющее воздействие. Оно предназначено также для компенсации эффекта внешних возмущающих воздействий, стремящихся нарушить требуемое поведение регулируемой величины. Управляющее воздействие вырабатывается устройством управления (УУ). Совокупность взаимодействующих управляющего устройства и управляемого объекта образует систему автоматического управления.
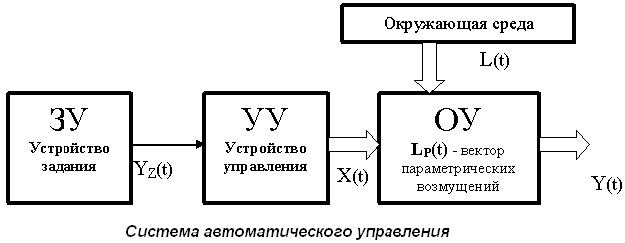
Система автоматического управления (САУ) поддерживает или улучшает функционирование управляемого объекта. В ряде случаев вспомогательные для САУ операции (пуск, остановка, контроль, наладка и т.д.) также могут быть автоматизированы. САУ функционирует в основном в составе производственного или какого-либо другого комплекса.
История техники насчитывает много ранних примеров конструкций, обладающих всеми отличительными чертами САУ (регулирование потока зерна на мельнице с т. н. «потряском», уровня воды в паровом котле машины Ползунова, 1765, и т. д.). Первой замкнутой САУ, получившей широкое техническое применение, была система автоматического регулирования с центробежным регулятором в паровой машине Уатта (1784). По мере совершенствования паровых машин, турбин и двигателей внутреннего сгорания всё более широко использовались различные механические регулирующие системы и устройства, достигшие значительного развития в конце 19 — начале 20 вв. Новый этап в А. у. характеризуется внедрением в системы регулирования и управления электронных элементов и устройств автоматики и телемеханики. Это обусловило появление высокоточных систем слежения и наведения, телеуправления и телеизмерения, системы автоматического контроля и коррекции. 50-е гг. 20 в. ознаменовались появлением сложных систем управления производственными процессами и промышленными комплексами на базе электронных управляющих вычислительных машин.

САУ классифицируются в основном по цели управления, типу контура управления и способу передачи сигналов. Первоначально перед САУ ставились задачи поддержания определённых законов изменения во времени управляемых величин. В этом классе систем различают системы автоматического регулирования (CAP), в задачу которых входит сохранение постоянными значения управляемой величины; системы программного управления, где управляемая величина изменяется по заданной программе; следящие системы, для которых программа управления заранее неизвестна. В дальнейшем цель управления стала связываться непосредственно с определёнными комплексными показателями качества, характеризующими систему (её производительность, точность воспроизведения и т. п.); к показателю качества могут предъявляться требования достижения им предельных (наибольших или наименьших) значений, для чего были разработаны адаптивные, или самоприспосабливающиеся системы. Последние различаются по способу управления: в самонастраивающихся системах меняются параметры устройства управления, пока не будут достигнуты оптимальные или близкие к оптимальным значения управляемых величин; в самоорганизующихся системах с той же целью может меняться и её структура. Наиболее широки, в принципе, возможности самообучающихся систем, улучшающих алгоритмы своего функционирования на основе анализа опыта управления. Отыскание оптимального режима в адаптивных САУ может осуществляться как с помощью автоматического поиска, так и беспоисковым образом.
Способ компенсации возмущений связан с типом контура управления системы. В разомкнутых САУ на УУ не поступают сигналы, несущие информацию о текущем состоянии управляемого объекта, либо в них измеряются и компенсируются главные из возмущений, либо управление ведётся по жёсткой программе, без анализа каких-либо факторов в процессе работы. Основной тип САУ — замкнутые, в которых осуществляется регулирование по отклонению, а цепь прохождения сигналов образует замкнутый контур, включающий объект управления и УУ; отклонения управляемой величины от желаемых значений компенсируются воздействием через обратную связь, вне зависимости от причин, вызвавших эти отклонения. Объединение принципов управления по отклонению и по возмущению приводит к комбинированным системам. Часто, помимо основного контура управления, замыкаемого главной обратной связью, в САУ имеются вспомогательные контуры (многоконтурные системы) для стабилизации и коррекции динамических свойств. Одновременное управление несколькими величинами, влияющими друг на друга, осуществляется в системах многосвязного управления или регулирования.
По форме представления сигналов различают дискретные и непрерывные САУ. В первых сигналы, по крайней мере в одной точке цепи прохождения, квантуются по времени (см. Импульсная система), либо по уровню (см. Релейная система), либо как по уровню, так и по времени (см. Квантование сигнала).
Простейший пример САУ — система прямого регулирования частоты вращения двигателя (рис. 1). Цель управления — поддержание постоянной частоты вращения маховика, управляемый объект — двигатель 1; управляющее воздействие — положение регулирующей заслонки дросселя 3; УУ — центробежный регулятор 2, муфта 4 которого смещается под действием центробежных сил при отклонении от заданного значения частоты вращения вала 5, жестко связанного с маховиком. При смещении муфты изменяется положение заслонки дросселя. Структурная схема рассмотренного примера (рис. 2) типична для многих САУ вне зависимости от их физической природы. Описанная система представляет собой замкнутую одноконтурную непрерывную систему автоматического регулирования механического действия, допускающую линеаризацию при исследовании.
Промышленность выпускает универсальные регуляторы, в том числе с воздействием по производной, по интегралу (см. Коррекция динамических свойств), экстремальные регуляторы, для управления различными объектами. Специализированные САУ широко применяются в различных областях техники, например: следящая система управления копировально-фрезерным станком по жёсткому копиру; САУ металлорежущих станков с программным управлением от магнитной ленты, перфоленты или перфокарты (преимущества такого управления заключаются в относительной универсальности, лёгкости перестройки программы и высокой точности обработки деталей); система программного управления реверсивным прокатным станом, включающая в свой контур управляющую вычислительную машину. В относительно медленных технологических процессах в химической и нефтяной промышленности распространены многосвязные САУ, осуществляющие регулирование большого количества связанных величин; так, при перегонке нефти информация о температуре, давлении, расходе и составе нефтепродуктов, получаемая от нескольких сотен датчиков, используется для формирования сигналов управления десятками различных регуляторов. САУ играют важную роль в авиации и космонавтике, например автопилот представляет собой САУ связанного регулирования, а иногда и самонастраивающуюся систему. В военной технике применяются высокоточные следящие системы, часто включающие вычислительные устройства (например, система углового сопровождения радиолокационной станции). При анализе многих физиологических процессов в живом организме, таких как кровообращение, регуляция температуры тела у теплокровных животных, двигательные операции, обнаруживаются характерные черты САУ (см. Кибернетика биологическая).