Создание и управление квадрокоптера
Автор: Pavel Chmelar
Перевод: В.В. Перебейнос
Источник: Источник оригинальной статьи
Аннотация
Pavel Chmelar - Создание и управление квадрокоптера. Статья о построении квадрокоптера, его регулировании. Рассмотрены все аспекты создания данного летательного аппарата: ориентация в пространстве, регулирование, подбор коэффициентов фильтра и контроллеров.
Введение
Первая информация о квадрокоптерах начала появляться в начале 20го столетия. Первый функциональный quadracopter был построен в 1920 году Этьеном Омишеном. Сначала были созданы устройства, которые смогли бы поднять вес человеческого тела. На сегодняшний день главным трэндом является создание небольшого беспилотного квадрокоптера. Основными причинами такого положения являются возможность простого управления и маневренность. Квадрокоптеры имеют большой спрос среди авиамоделистов, но также находят свое применение и в профессиональной сфере, например, полиции или армии.
В данной статье рассматриваются впросы о создании квадрокоптера, который был построен в сотрудничестве с моим коллегой Ing. Pavel Rozsival. Также рассматривается принцип управления, вопрос об устойчивости и возможности использования квадрокоптера для многих целей.
Квадрокоптер
Квадрокоптер (рис.1), это беспилотный летательный объект (БПЛА), который летает с помощью четырех винтов включенных попарно перпендикулярно (т.е. первая пара противоположных винтов (рис. 2) вращается в одном направлении для поддержания баланса в оси х. Вторая пара противоположных винтов вращается в противоположном направлении, для поддержания баланса в оси Y (рис. 3).) Такая конструкция обсловленна необходимостью ликвидации вращения квадрокоптера относительно оси Z.
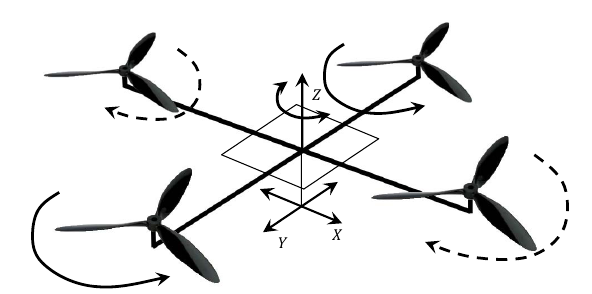
Рисунок 1 – Принцип полёта квадрокоптера.
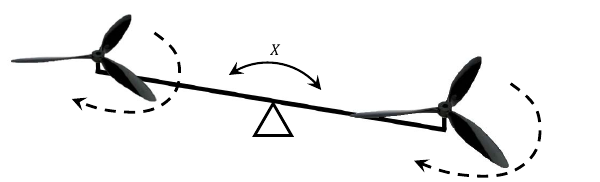
Рисунок 2 – Принцип работы первого плеча.

Рисунок 3 – Принцип работы второго плеча.
В вопросе о контроле, правильно будет разбить проблемы на три независимые части. Первая часть представляет собой контроль по оси Х (рис. 2), где важно равновесие на рычаге, вторая часть аналогична первой, по оси Y (рис. 3). В последней части управляем вращением по оси Z (рис. 1), которое необходимо предотвращать.
Двигатели и драйвера управления ими
При решении задачи стабилизации, управления двигателем, передачи данных требуется большие ресурсы центрального микроконтроллера (MCU). В данном случае используется ARM Cortex-M3, являющийся 32-х битным микроконтроллером.Структурная схема подключения одного двигателя приведена ниже.

Рисунок 4 – Структурная схема подключения одного двигателя.
Квадрокоптеру необходима относительно высокая тяга двигателя. Для этих целей хорошо подходят бесколлекторные двигатели, управляющиеся с помощью широтно-импульсной модуляции (ШИМ/PWM). Функция генерации ШИМ импульсовдля управления двигателями перенесена на драйвера двигателей (ESC – Electronics Speed Control). Для успешного управления, необходимо знать положение ротора в каждый момент времени. Часто двигатели уже имеют встроенные датчики, дающие полную картину о положении ротора, но это далеко не правило, а скорее исключение. Зачастую положение ротора определяют посылая на обмотки двигателя высокочастотный импульс и оценивается их обратное индуцированное отражение, которое зависит от положения магнита находящегося ближе всего к катушке.
Преимуществом такого решения является низкая цена на такой двигатель (без датчика положения), меньшее количество проводов (у двигателей с датчиками положения их пять).
Для полетов также хорошо подходят outrunner двигатели (вид бесколлекторных). Они имеют более выскоий крутящий момент. Двигатели переменного тока на 30-50% легче двигателей постоянного тока с теми же параметрами и имеют больший КПД. Также лучше их показатели крутящего момента. Единственное преимущество двигателей постоянного тока проявляется на максимальных оборотах. но хорошие моторы переменного тока используются в квадрокоптерах лишь на 20% от их возможностей. Поэтому рекомендуется использовать их. Все это позволяет строить легкие модели с большим временем автономного полёта.
При выборе мотора необходимо обращать внимание на его производительность. Необходимо чтобы двигатели обеспечивали взлет сконкретным весом, но также неплохо иметь запас, чтобы избежать перегрузки двигателя.
Управление двигателями с помощью ШИМ
Способ управления двигателями переменного тока основан на принципе управления серводвигателями. Основной сигнал имеет ширину 1мс с периодом 20 мс. После включения ширина управляющего импульса должна быть равна 1мс, что соответствует остановке двигателя (рис. 5 верх). Если при старте длительность импульса более 1 мс, драйвер не позволит включиться двигателю из соображений безопасности. Для пуска двигателей нужно длительность импульса 1 мс. Плавное увеличение ширины импульса приводит к увеличению числа оборотов двигателя. Верхний предел ширины импульса это 2 мс (рис. 5 низ), при этом значении двигатель имеет максимальную производительность.
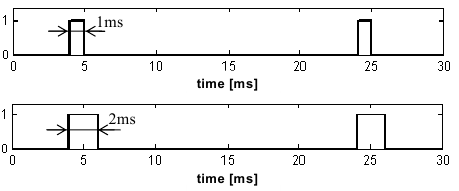
Рисунок 5 – Управление двигателями с помощью ШИМ.
Непрерывность изменения направления вращения является критическм фактором для стабилизации. Изменение числа оборотов должно быть плавным, так как это может привести к высоким изменениям выходного значения контроллера, и это может привести к дестабилизации квадрокоптера.
ПИД регулятор
Пропорционально-интегрально-дифференциальный (ПИД) регулятор является общим контуром управления механизма обратной связи. ПИД-регулятор вычисляет значение ошибки е(t) в виде разницы между измерянной переменной процесса (PV) и требуемым значением. Регулятор с каждой итерацией делает попытку минимизировать ошибку путем регулирования входами управляемого процесса. Основное уравнение ПИД регулятора приведено ниже.

Блок-схема параллельного ПИД-регулятора приведена на Рис. 6
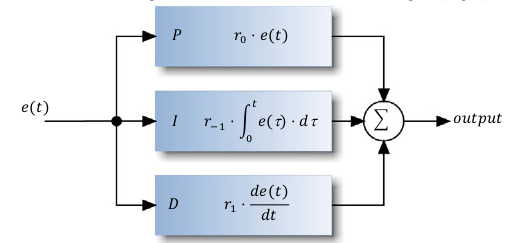
Рисунок 6 – Блок-схема параллельного ПИД-регулятора.
e(t) – ошибка
r0 – коэффициент усиления пропорциональной составляющей
r-1 – коэффициент усиления интегральной составляющей
r1 – коэффициент усиления дифференциальной составляющей
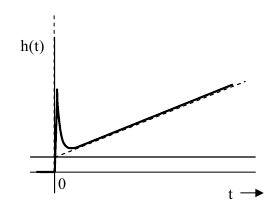
Рисунок 7 – Передаточная характеристика ПИД-регулятора.
Передоточная характеристика ПИД-регулятора (рис. 7) показывает влияние каждой составляющей регулятора. Пропорциональная составляющая вырабатывает выходной сигнал, противодействующий отклонению регулируемой величины от заданного значения, наблюдаемому в данный момент времени. Интегральная составляющая пропорциональна интегралу от отклонения регулируемой величины. Её используют для устранения статической ошибки. Она позволяет регулятору со временем учесть статическую ошибку. Дифференциальная составляющая пропорциональна темпу изменения отклонения регулируемой величины и предназначена для противодействия отклонениям от целевого значения.
Этот тип регуляторов не всегда является лучшим решением, но с оптимальными настройками коэффициентов способин бороться с нестабильностью. Неточные коэффициенты регулятора приведут к большему времени обработки ошибки, поэтому целесообразно уделить этому вопросу должное внимание.
Ориентация в пространстве
Для описания движения квадрокоптера необходимо определить подходящую систему координат. Для решения большинства проблем, связанных с движением самолетов, существует две системы координат. Первая система координат – относительно земли и может рассматриваться для анализа движения (инерциальная система координат). Вторая система координат - относительно самолета и называется системой координат тела. На следующем рисунке (рис. 8) представлены две правые системы координат.
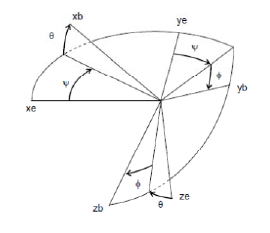
Рисунок 8 – Система координат относительно земли и относительно корпуса.
Ориентации самолета часто описывается тремя последовательными поворотами, порядок которых имеет важное значение. Угловые вращения называются углами Эйлера. Ориентации тела по отношению к неподвижной точке на земле могут быть определены следующим образом:
- Поворот вокруг оси zb а угол рыскания Ψ
- Поворот вокруг оси yb а угол тангажа Θ
- Поворот вокруг оси хb а угол крена φ

Существует и другой путь определения углов, через показания гироскопа:

Данные с гироскопа – угловая скорость. Время Δt – это время между двумя измерениями и из выражения для определения расстояния:

можно рассчитать углы.
Заключение
Теперь квадрокоптер имеет возможность находиться в устойчивом стостоянии на высоте, но есть еще несколько моментов необходимых для полной стабилизации. Более точный подбор коэффициентов ПИД-регулятора всегда имеет место быть. Выбор другого регулятора. Также можно более точно определять положение в пространстве используя более сложные фильтры. Важным фактором в стабилизации полёта квадрокоптера являются погодные условия.
В будущем планируется добавить некоторые дополнительные функции управления для осуществления специальных маневров.
Для увеличения функциональности квадрокоптера на его борт могут быть добавлены различные датчики, нарпимер высотомер или камера. Квадрокоптер отлично подходит для разведки мест труднодоступных человеку. С дополнительными устройствами можно задавтаь траекторию полета и проводить исследования местности.
Список использованной литературы
1. KUBIK S., KOTEK Z., Salamon M. 1968. Teorie regulace. 1., Linearni regulace. Praha: Statni nakladatelstvi technicke literatury, 1974. 269 s.
2. Vassilis' Project. Vassilis' Hobbies and Projects. [Online] [Citace: 12. 02. 2011.] Dostupne z :
3. Quadrocopter - Gluonpilot. Quadrocopter. [Online] [Citace: 12. 02. 2011.] Dostupne z :
4. WINKLER, ZBYNEK, 2005. Rizeni (Robotika.cz > Guide). Robotika.cz. [Online] 11. 10. 2005. [Citace: 19. 02. 2011.] < http://robotika.cz/guide/servo/cs>
5. PELIKAN, DANIEL. RCM Pelikan. [Online] [Citace: 10. 05. 2011.] Dostupne z :
6. PREMERLANI, WILLIAM A BIZARD, PAUL. 2009. Direction Cosine Matrix IMU: Theory. gentlenav - Firmware for Bill Premerlani's IMU based UAV Dev Board autopilots. [Online] 17. 05. 2009. [Citace: 05. 05. 2011.] Dostupne z :