
Реферат по теме выпускной работы
Содержание
- ВВЕДЕНИЕ
- 1. АКТУАЛЬНОСТЬ ТЕМЫ
- 2. АНАЛИЗ ОБЪЕКТА ИССЛЕДОВАНИЯ
- 2.1 Диагностирование состояния канала связи
- 2.2 Концепция устройства диагностирования состояния канала связи на основе измерения параметров сигнала. Ограничение «погрешность - время измерения»
- 3. АНАЛИЗ СУЩЕСТВУЮЩИХ МЕТОДОВ ИЗМЕРЕНИЯ ЧАСТОТЫ В ТКС
- 4. МЕТОД ИЗМЕРЕНИЯ ЧАСТОТЫ ПРИ ПОМОЩИ РАЦИОНАЛЬНЫХ ПРИБЛИЖЕНИЙ
- ВЫВОДЫ
- СПИСОК ИСТОЧНИКОВ
ВВЕДЕНИЕ
В современных телекоммуникационных системах чаще всего присутствуют изменения частоты несущего сигнала, причинами которых являются как особенности алгоритмов их функционирования (периодические прыжки по частоте, в связи с чем происходит переход приемника с одной частотного диапазона работы на другой - frequency hopping, WiMAX), так и влияние внешних факторов (эффект Доплера при перемещении передатчика и/или приемника, влияние внешних шумов и шумов аппаратуры). Все это приводит к тому, что теоретические расчеты и модели во многих аспектах не соответствуют реальным процессам, которые существуют в телекоммуникационных системах и сетях. Поэтому как на этапе построения системы, так и на этапе ее функционирования (для диагностики состояния оборудования) одной из важнейших фаз является измерение параметров сигналов, передаваемых на разных участках, проведение сбора и анализа полученной информации и идентификация существующих проблем. Однако выявление недоработок и проблемных участков невозможно без получения достоверной и актуальной информации.
Тематика данной научной работы посвящена направлению сбора информации о параметрах сигнала в канале связи с определенной точностью в условиях ограниченного времени и задаче оценки частоты на основе этих данных.
1 АКТУАЛЬНОСТЬ ТЕМЫ
Актуальность работы состоит в поиске методов решения фундаментальной проблемы ограничения «погрешность-время измерения» в аспекте задачи повышения точности измерения частоты за ограниченное время, что в дальнейшем может быть использовано для дальнейшего диагностирования состояния телекоммуникационного канала связи.
Цель работы - повышение точности измерений частоты в условиях ограниченного времени измерения.
Для достижения поставленной цели необходимо решить следующие задачи:
- Сформировать концепцию диагностирования состояния телекоммуникационного канала связи на основании измерения частоты.
- Обосновать требования, предъявляемые к процессу измерения частоты.
- Рассмотреть существующие методы измерения частоты в аспекте ограничения «погрешность-время измерения».
- Выполнить структурно-алгоритмический синтез схемы прибора измерения частоты.
Методика исследования: математические методы, структурно-алгоритмический синтез.
2 АНАЛИЗ ОБЪЕКТА ИССЛЕДОВАНИЯ
2.1 Диагностирование состояния канала связи
Примером систем, где существует необходимость измерения довольно быстро изменяющейся частоты, является GPS. Спутниковая радионавигационная система или, как она еще называется, глобальная система позиционирования, GPS (Global Positioning System) обеспечивает высокоточное определение координат и скорости объектов в любой точке земной поверхности, в любое время суток, в любую погоду, а также точное определение времени. В околоземном пространстве развернута сеть искусственных спутников Земли (ИСЗ), которые равномерно «покрывают» всю земную поверхность. Орбиты ИСЗ вычисляются с очень высокой точностью, поэтому в любой момент времени известны координаты каждого спутника. Радиопередатчики спутников непрерывно излучают сигналы в направлении Земли. Эти сигналы принимаются GPS-приемником, который находится в определенной точке земной поверхности, координаты которой нужно определить. В приемнике измеряется время распространения сигнала от ИСЗ и вычисляется расстояние «спутник-приемник». Поскольку для определения местоположения точки нужно знать три координаты (плоские координаты X, Y и высоту H), то в приемнике должны быть измерены расстояния до трех различных ИСЗ. Передающая аппаратура спутника излучает синусоидальные сигналы на двух несущих частотах: L1 = 1575,42 МГц и L2 = 1227,6 МГц. Перед этим сигналы модулируются так называемыми псевдослучайными цифровыми последовательностями. При этом частота L1 модулируется двумя видами кодов: C/A-кодом (код свободного доступа) и P-кодом (код санкционированного доступа), а частота L2 - только P-кодом. Несущие частоты теоретически неизменны, однако вследствие движения спутника и GPS приемника друг относительно друга возникает эффект Доплера. Кроме того, скорость распространения электромагнитной волны непостоянна и зависит от свойств среды. В данном случае важна траектория прохождения сигнала и свойства атмосферы (ее температура, состав, диэлектрическая проницаемость). В связи с неоднородностью атмосферы возникает эффект тропосферного распространения сигнала. Происходят изменения скорости распространения, частоты и траектории сигнала. Изменение траектории луча составляет десятые доли градуса, но за счет расстояния от спутника до поверхности Земли эти искажения приводят к значительному влиянию на конечный результат. В связи с этим необходимо проводить периодические измерения частоты и ее мониторинг для повышения точности результатов определения местоположения [1,2].
Для диагностирования состояния канала связи в составе телекоммуникационной системы необходимо проводить довольно частые измерения с высокой точностью. Требования к точности оговариваются соответствующими стандартами [3]. Требование к времени измерения возникает вследствие того, что важные для анализа быстрые изменения частоты будут усредненные при длительном периоде измерения. Более конкретные ограничения по времени измерения можно получить из теоремы Котельникова, т.е. измерения должны проводиться с частотой, не менее чем в два раза превышает максимально необходимую для наблюдения частоту отклонения измеряемого параметра от теоретического. По сути предполагается определять дрожание (или джиттер) (см. рис. 1) частоты относительно ее номинального значения и анализировать измеренный джиттер в частотной области (т.к. одним из его наиболее важных при диагностировании оборудования параметров является частота), при этом чем чаще будут проводиться измерения частоты рассматриваемого сигнала, тем более высокочастотные составляющие джиттера частоты могут быть обнаружены.

Рисунок 1 – Формирование джиттера сигнала
(анимация: 7 кадров, задержка между кадрами 1,5 с, количество циклов повторения — 5, размер 49 Кбайт, создана при помощи Gif Animator )
На состояние канала связи влияет множество факторов и причин. К ним можно отнести параметры приемо-передающего оборудования, которые зависят от его состояния, параметры среды распространения сигнала, которые постоянно меняются под влиянием внешних факторов. Однако все это влияние отражается на сигнале и по его случайным изменениям можно, в свою очередь, оценивать и прогнозировать состояние оборудования и его отказы [4].
2.2 Концепция устройства диагностирования состояния канала связи на основе измерения параметров сигнала. Ограничение «погрешность - время измерения»
Исходя из вышесказанного, можно сформировать концепцию устройства диагностирования состояния системы на основе анализа джиттера частоты (см. рис. 2).

Рисунок 2 – Концепция устройства диагностирования состояния канала связи
Исследуемый сигнал поступает на вход измерителя частоты, который в течение некоторого ограниченного промежутка времени устанавливает усредненное значение частоты за этот период. Формируется выборка значений частоты. Сложность данного этапа заключается в том, что промежуток времени, необходимый измерителю частоты для определения искомого значения должен быть достаточно мал для того, чтобы были зафиксированы быстрые изменения частоты, и при этом позволял проводить измерения с необходимой точностью, в противном случае весь процесс теряет смысл.
На следующем этапе проводится обработка полученных ранее данных. Определяется джиттер значений частоты, его максимальное и минимальное значения для выборки, а также СКО. Вследствие того, что джиттер содержит в общем случае в себе как периодическую, так и случайную составляющие, для анализа и вычислений целесообразно применить аппарат математической статистики.
Наиболее информативной среди параметров и характеристик джиттера с точки зрения диагностирования состояния системы является его частота. Поэтому далее совокупность полученных амплитудных значений джиттера переносится в частотную область и проводится анализ спектра джиттера.
Как известно, сигнал может рассматриваться в различных формах представления: во временной и в частотной областях. Связь осуществляется с помощью преобразования Фурье [4]. Однако данный математический аппарат предполагает наличие бесконечной по времени реализации сигнала, что в реальных системах является неосуществимым условием и противоречит самому принципу передачи информации, так как информативными являются только такие параметры сигнала, которые изменяются во времени (в соответствии с определенными правилами). Оперирование ограниченными реализациями сигналов приводит к «размытию» спектра сигнала, увеличению его ширины, а, следовательно, при измерении частоты, к повышению погрешности результатов (см. рис. 3).
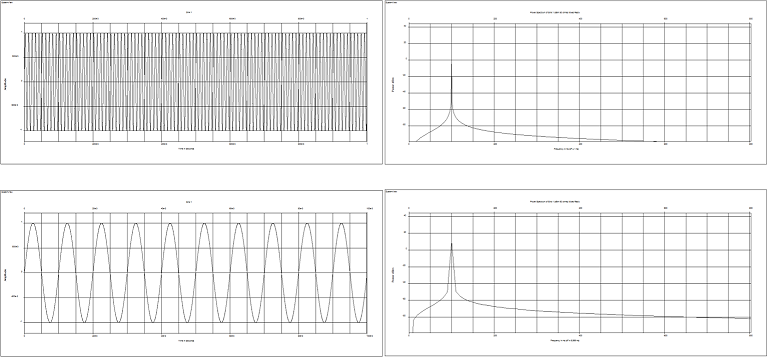
Рисунок 3 – Пример формирования спектров различных по времени реализаций сигнала
Все вышесказанное приводит нас к формированию фундаментального ограничения «погрешность - время измерения». Его суть заключается в том, что в классических методах измерения частоты для повышения точности результатов необходимо увеличивать время этого измерения, то есть повышать продолжительность рассматриваемой реализации. И наоборот, снижение времени измерения приводит к снижению точности измерения частоты. Обойти это ограничение невозможно, можно лишь снизить его влияние посредством усовершенствования методов измерения частоты (применение взвешивающих окон, использование более подходящих для данного случая методов).
Из всего вышесказанного также следует, что результаты перехода при анализе джиттера из временной в частотную область будут напрямую зависеть от того, насколько мал был интервал измерения частоты исходного сигнала. То есть, чем меньше был интервал, тем более высокочастотные составляющие в спектре джиттера мы сможем наблюдать. Увеличение интервала будет приводить к тому, что наиболее быстрые колебания частоты исходного сигнала будут усреднены. В результате энергия этих высокочастотных составляющих в спектре джиттера будет распределена между низкочастотными составляющими, что приведет к возможности анализа джиттера и его составляющих только в этой области спектра.
Перевод значений из временной области в частотную по сути является завершением работы устройства. Последним этапом является представление полученных результатов в удобной для пользователя форме. Далее уже специалистом соответствующей квалификации проводится их анализ, определение текущего состояния системы и поиск методов решения проблемы.
3 АНАЛИЗ СУЩЕСТВУЮЩИХ МЕТОДОВ ИЗМЕРЕНИЯ ЧАСТОТЫ В ТКС
Аппаратура для частотно-временных измерений образует единый комплекс приборов обеспечивающих возможность проведения измерений с непосредственным их привязкой к Государственного эталона частоты и времени. Основными измерительными приборами и средствами измерений частоты являются [5,6]:
- осциллограф;
- приемники сигналов эталонных частот и компараторы;
- преобразователи частоты сигналов;
- измерители частоты резонансные;
- измерители частоты на основе метода заряда-разряда конденсатора;
- измерители частоты цифровые;
- цифровые измерители частоты и интервалов времени.
В зависимости от диапазона неизвестных частот, допустимой погрешности и необходимой скорости работы на практике применяют различные методы измерения частоты, например:
- методы сравнения;
- методы усреднения (основанные на определении дисперсии Аллана, пример - измерители частоты Tektronix FCA3000 и FCA3100);
- метод определения степени перекрытия импульсов;
- метод подсчета импульсов - временная база (время измерения) - фиксированная [7];
- нониусный метод (уточнение метода подсчета импульсов).
В методах сравнения (резонансный, гетеродинный методы, а также при измерении с использованием осциллографа) используют сравнение измеряемой частоты с эталонной частотой источника образцовых колебаний. Эти методы применяются в основном для градуировки генераторов различных измерительных приборов. Для их реализации необходим эталонный генератор более высокой точности и устройство сравнения частот. К методам, которые используют осциллограф, относятся:
- определение частоты методом фигур Лиссажу (используется синусоидальная развертка осциллографа);
- определение интервалов времени (периода, длительности импульса и т.д.) с использованием калиброванной развертки осциллографа;
- определения частоты по яркости меток на круговой развертке.
Минусом данных методов является их аналоговая природа, а также необходимость дополнительной обработки полученных результатов, что вносит дополнительную погрешность и увеличивает время измерения.
Все эти методы могут обеспечивать минимальную погрешность и даже теоретическое отсутствие систематической погрешности. Условия наступления такого события для каждого из методов свои, но в их основе лежит кратность измеряемой частоты и эталонной, на основе которой производится измерение. Проблема заключается в том, что такие ситуации являются уникальными, маловероятными и не могут рассматриваться как стандартные.
Однако существует и другой подход к решению задачи измерения частоты за ограниченный промежуток времени с максимизацией точности. Идея заключается в подборе временной базы измерения кратной измеряемому периоду, в результате чего за время измерения наблюдается целое число периодов неизвестной частоты. Таким образом сводится к минимуму методическая погрешность и теоретически она равна нулю. Примером такого подхода является метод измерения частоты с помощью рациональных приближений [8,9].
4 МЕТОД ИЗМЕРЕНИЯ ЧАСТОТЫ ПРИ ПОМОЩИ РАЦИОНАЛЬНЫХ ПРИБЛИЖЕНИЙ
Для большинства практических задач точная оценка частоты за короткий период может быть достигнута с помощью специальной математической обработки информации. В частности, такой подход характерен для расматриваемого метода (см. рис. 4, 5).
Неизвестная частота измеряется путем сравнения ее со стандартной частотой. На вход системы подаются два синусоидальных сигнала с эталонной (или стандартной) и неизвестной (или исследуемой) частотой. Выявляются переходы через ноль обеих частот, создавая две регулярные независимые последовательности узких импульсов. Неизвестна и эталонная последовательности полученных импульсов сравниваются по совпадениям. Это сравнение проводится с использованием логического элемента И. Генерируется последовательность импульсов совпадений. Импульсы совпадения могут быть использованы в качестве признака, по которому определяются моменты запуска и остановки пары цифровых счетчиков.

Рисунок 4 – Структурная схема измерителя частоты на основе метода рациональных приближений

Рисунок 5 – Функциональная схема измерителя частоты на основе метода рациональных приближений
Эталонная и исследуемая последовательности импульсов поступают на счетчики и измерение неизвестной частоты производится путем умножения известной эталонной частоты на отношение количества импульсов исследуемой последовательности к количеству импульсов стандартной последовательности, полученных из двух цифровых счетчиков [8].
На вход измерителя частоты поступает импульсная последовательность с неизвестной частотой fx. Есть источник эталонного сигнала с частотой f0, причем он может быть как встроенным, так и внешним. Рекомендуется использование высокочастотного источника атомного стандарта частоты (погрешность 10^-9-10^-10). Кроме того, значение эталонной частоты должно быть кратно десяти. Следует отметить, что импульсы в общем случае имеют не идеальные фронты (то есть имеется определенный наклон) и нестабильное размещения во времени (джиттер). При этом идентификация переднего и заднего фронтов обычно происходит после достижения половины амплитудного значения. Однако в данном случае для упрощения представления процесса функционирования метода, примем отсутствие джиттера. Также учтем в модели неидеальность фронтов.
Импульсные последовательности неизвестной и эталонной частот поступают на логический элемент И. После первого полного совпадения начинается подсчет импульсов. После достижения на счетчике импульсов неизвестной частоты значения, равного заданной степени числа десять, происходит расчет неизвестной частоты.
Сформируем требования к элементам схемы:
- генератор эталонной частоты: погрешность 10^-9-10^-10;
- RS-триггер: отсутствие неопределенного состояния, fmax=max(f0,fx);
- логические элементы
І
: fmax=max(f0,fx); - счетчики: fmax=max(f0,fx), выбранная разрядность влияет на доступные для выбора значения r. Для 16 разрядов имеем 65536 возможных состояний, т.е. r=1…4 (Σm(Pn)=10…10000). Для 32 разрядов имеем 4294967296 возможных состояний, т.е. r=1…9 (Σm(Pn)=10…1000000000).
- микропроцессор: fmax=max(f0,fx )/10^r;
- блок цифровой индикации: особых требований нет.
ВЫВОДЫ
Измерение частоты с достаточной точностью за определенный, заранее оговоренный временной интервал - одна из фундаментальных задач отрасли телекоммуникаций. Существует множество различных методов измерения. Однако практическое применение требует конкретных, наиболее подходящих решений для каждой из поставленных задач.
Был проведен анализ существующих методов измерения частоты в условиях ограничения «погрешность-время измерения» для устройства диагностирования состояния канала связи на основе измерения частоты сигнала. В результате рассмотрения концептуальной годности данных методов для точных измерений для задач диагностирования, в частности, джиттера, а также их достоинств и ограничений, была выбрана наиболее подходящая инновационная модернизация метода дискретного счета - метод измерения частоты на основе рациональных приближений. В процессе исследования было выявлено, что погрешность методов зависит не только от идеи, лежащей в основе самих методов, но и от соотношения измеряемой и эталонной величин. Для выбранного метода такое соотношение оптимальное и оно является не случайным, а стандартным режимом процесса измерения.
Также был проведен поиск спорных вопросов (влияние джиттера импульсов, определение степени перекрытия импульсов для запуска метода и соответствующей ширины импульсов) и намечены пути их решения с точки зрения практической реализации метода.
Дальнейшие исследования будут заключаться в моделировании процесса функционирования данного метода в MatLab и минимизации влияния его слабых сторон на получаемые результаты.
При написании данного автореферата квалификационная работа магистра еще не завершена. Дата окончательного завершения работы: декабрь 2013 года. Полный текст работы и материалы по теме работы могут быть получены у автора или его научного руководителя после указанной даты.
СПИСОК ИСТОЧНИКОВ
- Козловский Е.А. Искусство позиционирования / Е.А. Козловский — М.: Вокруг света, 2006. - № 12 (2795). — 204-280 с.
- GPS-навигаторы для путешественников, автомобилистов, яхтсменов/ В.С. Найман — Санкт-Петербург: НТ Пресс, 2008.— 400 с.
- Бакланов И.Г. Технологии измерений в современной телекоммуникации. / И.Г.Бакланов – М.: Эко-Трендз, 1998. – 264 с.
- Скляр Б. Цифровая связь. Теоретические основы и практическое применение. Изд. 2-е, испр. :Пер. с англ. – М. : Издательский дом «Вильямс», 2003. – 1104 с.
- Аппаратура для частотных и временных измерений/ Под ред. А.П.Горшкова. Изд-во «Советское радио», 1971, 336 с.
- Ратхор Т.С. Цифровые измерения. Методы и схемотехника/ Т.С. Ратхор — М.: Техносфера, 2004. — 376 с.
- J.C. Fletcher, Frequency measurement by coincidence detection with standard frequency/ US Patent 3, 924,183, 1975.
- Daniel Hernаndez Balbuena, Oleg Sergiyenko, Vera Tyrsa, Larysa Burtseva, Moisеs Rivas Lоpez, Signal frequency measurement by rational approximations, Measurement, vol. 42, no. 1, Elsevier, 2009, pp. 136–144.
- Полапа А.А. Анализ и обоснование методов измерения частоты колебаний в условиях ограничения «время – погрешность измерений» / А.А. Полапа // Мат. 9-й Междунар. молодежной научно-технической конф. «Современные проблемы радиотехники и телекоммуникаций» (РТ-2013). — Севастополь: Изд-во СевНТУ, 2013. — С. 158 — 159.