Полунатурное моделирование системы автоматического управления расходом воздуха в сетевом динамическом объекте с распределёнными параметрами
Авторы: Кириллов А.Г., Лютый Е.В., Бондини С.С., Святный В.А.
Источник: Информатика и компьютерные технологии-2011 / Матерiали II мiжнародної науково-технiчної конференцiї студентiв, аспiрантiв та молодих вчених. — Донецьк, ДонНТУ — 2011, с. 67-69.
Аннотация
Кириллов А.Г., Лютый Е.В., Бондини С.С., Святный В.А. Полунатурное моделирование системы автоматического управления расходом воздуха в сетевом динамическом объекте с распределенными параметрами. Рассмотрены основные идеи полунатурного моделирования. Разработана универсальная система для тестирования аппаратуры автоматического управления. Ключевые слова: полунатурное моделирование, микроконтроллерная система управления, сетевой динамический объект, кластер.
Постановка проблемы
Основная часть современных исследований не обходится без моделирования изучаемых процессов. Оно применяется не только в математике, физике, экономике, но и в химии и даже биологии. В первую очередь моделирование используется для экономии средств, затрачиваемых на исследование, так как позволяет примерно оценить результаты работы, выявить ошибки, еще до ее непосредственного выполнения.
Полунатурное моделирование – это создание системы, состоящей из двух частей. Первая часть представляет собой реальный, натуральный объект, который функционирует полноценно. Вторая часть – модель, которая выполняется на вычислительной машине. Т.е. такой подход позволяет протестировать работу готовой системы при отсутствии натуральных условий эксплуатации. Модель в такой системе должна создавать полную видимость действительных условий работы тестируемой системы.
Актуальность темы
Полунатурная модель дает наиболее полное представления о работе тестируемой системы, что позволяет ее точно настроить, исправить ошибки. В большинстве случаев микроконтроллерные системы управления работают с дорогостоящими опасными объектами, в этом случае разработчик не имеет возможности полноценной проверки работы такой системы. С другой стороны, до ввода системы в эксплуатацию, ее работа должна на требуемом уровне обеспечивать управление объектом. Все эти проблемы позволяет решить полунатурное моделирование.
Магистерская работа посвящена актуальной задачи полунатурного моделирования, так же затронуты идее распараллеливания и их реализация с помощью библиотеки MPI.
Цель статьи – разработка системы управления сетевым динамическим объектом с распределенными параметрами и ее тестирование с помощью полунатурного моделирования.
Исследования
Работа с моделями сетевых динамических объектов началась на третьем курсе в рамках групповой курсовой работы по дисциплине «Параллельное программирование». В ходе данной курсовой работы была спроектирована модель сетевого динамического объекта с сосредоточенными параметрами. В данном проекте использованы результаты курсовой работы, но в дальнейшем предполагается введение модели с распределенными параметрами, что даст большую реалистичность и детальность.
Разработанная система состоит из 3-х частей:
- модель динамического объекта;
- интерфейс пользователя и связь всех частей системы;
- микроконтроллерная система управления.
Структура системы представлена на рисунке 1.

Рисунок 1 – Структура системы управления потоками воздуха
В данной структуре видно, что микроконтроллерная система управления – это реальный, натуральный объект, а СДО модель, реализованная на кластере, создает полную видимость действительных условий работы. Интерфейс пользователя в этой системе используется для:
1. Постановки различных задач кластеру (изменение структуры, расстановка датчиков, изменение параметров динамического объекта);
2. Настройки системы управления (конфигурирование системы, задание начальных значений);
3. Так же программа клиента используется для связи модельной части и микроконтроллерной системы управления.
Сетевой динамический объект представляется графом, в ветвях которого установлены регуляторы. Пример такого графа представлен на рисунке 2.
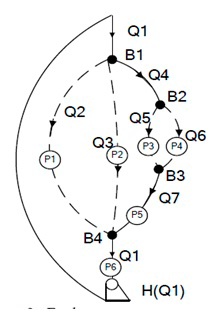
Рисунок 2 – Граф сети динамического объекта
Где Q – потоки; B – узлы; H – вентилятор; Р – регуляторы;
Регуляторы в такой системе разбиваются на 3 группы:
1. Основные регуляторы – регуляторы, которые располагаются в тех ветвях, воздушные потоки которых требуют управления (Р1 – Р4);
2. Групповые регуляторы – работают в том случае, если основные регуляторы не справляются с поставленной задачей (Р5);
3. Регуляторы вентиляторов – работают в том случае, если при текущей мощности вентиляторов невозможно достичь заданного уровня потоков воздуха (Р6).
Основные и групповые регуляторы имеют одинаковую структуру и состоят из 3 последовательно подключенных блоков. Структура регулятора представлена на рисунке 3.
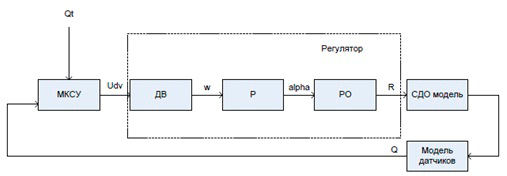
Рисунок 3 – Структура регулятора
Где МКСУ – микроконтроллерная система управления; ДВ – двигатель; Р – редуктор; РО – регулирующий орган; СДО – сетевой динамический объект.
Регуляторы вентиляторов более простые, основной принцип их работы заключается в повышении мощности. Это требуется только в том случае, если основные и групповые регуляторы не могут обеспечить нужный поток воздуха.
Список использованной литературы
1. Svjatnyj V., Resch M., Keller R., Rabenseifner R.: Virtuelle Simulationsmodelle und ein Devirtualisierungsvorgang fur die Entwicklung der parallelen Simulatoren von komplexen dynamischen Systemen. Donezk, 2006. – S. 36–43.
2. Feldmann L.P., Resch M., Svjatnyj V.A., Zeitz M.: Forschungsgebiet: parallele Simulationstechnik. In: DonNTU, FRTI-Werke, Reihe “Probleme der Modellierung und rechnergestьtzten Projektierung von dynamischen Systemen”, Band 9(150). – Donezk, 2008. – S. 9-36.