Назад в библиотеку
УДК
[621.436-529:629.5]: 004.89 ББК 39.455.54
Буй Нгок Хай, С. В. Головко, Ф. В. Свирепов
Источник: Журнал: Вестник Астраханского государственного технического университета. Серия: Морская техника и технология [Перейти]
Задача работы - создание адекватной модели судового дизеля на основе экспертных систем, учитывающей технические и технологические параметры конкретного двигателя. Модульная структура модели должна предоставлять возможность изменять алгоритмы управления объектом, что позволит оценить их эффективность и перспективность дальнейшего развития.
В качестве объекта управления был выбран дизель 6ЧН 15/18 (3Д6Н). Для повышения качества переходных процессов, происходящих в двигателе, при создании его модели было решено использовать нечетко-нейронные сети. В ходе серии экспериментов на нагрузочном стенде параллельно снимались и записывались массивы данных, характеризующие поведение системы управления и ответные реакции объекта управления. Был собран массив данных, характеризующий изменение мощности, выдаваемой двигателем в процессе работы. Моделирование проводилось с использованием пакета MATLAB Simulink. Полученная система после испытания подтвердила свою адекватность реальному судовому дизелю и возможность использования для разработки и тестирования на ее основе систем управления.
Ключевые слова: судовой дизельный двигатель, нечетко-нейронная сеть, объект управления, модульная структура.
The work problem is creation of adequate model of a ship diesel engine on the basis of expert systems which should consider technical and technological parameters of the certain engine. The modular structure of model should allow changing algorithms of management of object that will allow estimating their efficiency and perceptivity of their further development. As object of control the diesel engine 6ЧН 15/18 (3Д6Н) has been chosen. For improvement of quality of the transient processes occurring in the engine, it has been decided to use fuzzy-neural network at creation of its model. In the course of carrying out of experiments at the loading stand the data files characterizing behavior of the control system and responses of the control object have been registered. Also the data file characterizing change in capacity, produced by the engine in the course of work has been collected. Modelling was spent with use of package MATLAB Simulink. The received system after test has confirmed the adequacy to real diesel engine and possibility of its using for working out and testing on its basis of control systems.
Key words: the ship diesel engine, fuzzy-neural network, object of control, modular structure.
Судовой дизель (СД) как объект управления характеризуется существенной нелинейностью, нестационарностью. Сложность применения традиционных систем управления дизелем и отсутствие полной адекватной модели обусловили поиск новых методов оптимизации управления СД и описания его как объекта управления. Это объясняется недостаточной точностью и полнотой информации о его характеристиках и возмущениях, возникающих в процессе эксплуатации дизеля [1]. Имеющийся опыт проектирования и настройки систем регулирования позволяет считать целесообразным использование нечетко-нейронных сетей (ННС) для решения задачи повышения качества управления.
Целью исследований стало создание адекватной модели СД, которая должна учитывать технические и технологические параметры конкретного двигателя [2]. Модульная структура модели должна позволять изменять алгоритмы управления объектом, что даст возможность оценить их эффективность и перспективность дальнейшего развития. Для моделирования был выбран дизель 6ЧН 15/18(3Д6Н). По разработанной методике были получены экспериментальные данные с системы управления двигателем. Были проведены также стендовые испытания и получены нагрузочные характеристики.
Для разработки модели была проведена серия экспериментов на нагрузочном стенде. В процессе экспериментов параллельно снимались и записывались данные, характеризующие поведение системы управления и ответные реакции объекта управления. Были также собраны данные, характеризующие изменение мощности, выдаваемой двигателем в процессе работы.
Моделирование проводилось с использованием пакета MATLAB Simulink [3]. Модель объекта управления СД состоит из нескольких подсистем (рис. 1).
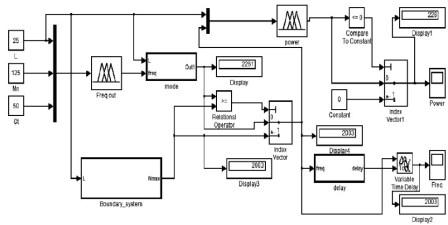
Рис. 1. Структура модели судового двигателя как объекта управления
Рассмотрим работу модели и каждую из подсистем подробнее. На входе система использует три сигнала, на выходе имеет два. Для удобства восприятия условные обозначения сигналов с расшифровками сведены в табл. 1.
Таблица 1 Параметры модели СД
* ТНВД - топливный
насос высокого давления.
Первоначально входные сигналы поступают на мультиплексор, где формируется единый вектор входных значений, который далее подается на блок «Freq out». Задачей этого блока является расчет частоты вращения в соответствии с полученными входными данными (рис. 2) с применением нечетких алгоритмов типа Сугено (Sugeno). Этот тип называют еще гибридными сетями ввиду того, что они сочетают в себе достоинства нечетких алгоритмов и способность к обучению, которая является свойством нейронных сетей [4, 5].
Формирование функций принадлежности входных сигналов гибридной сети проводилось методом нечеткой кластеризации экспериментально полученных данных (рис. 3). Задачей нечеткой кластеризации является нахождение нечеткого разбиения или нечеткого покрытия множества элементов исследуемой совокупности, которые образуют структуру нечетких кластеров, присутствующих в рассматриваемых данных.

Рис. 2. Сгенерированная структура нейронечеткого вывода (ННВ) после определения входных и выходных переменных блока «Freq out»

Рис. 3. Формирование функций принадлежности входных сигналов методом нечеткой кластеризации
Эта задача сводится к нахождению степеней принадлежности элементов универсума искомым нечетким кластерам, которые в совокупности и определяют нечеткое разбиение или нечеткое покрытие исходного множества рассматриваемых элементов [3]. Для решения задачи нечеткой кластеризации использовался специализированный пакет Anfis из Fuzzy Logic Toolbox среды MATLAB.
Графически каждую из полученных подсистем Сугено можно представить так, как показано на рис. 4. Такое представление систем ННВ является общепринятым. Обучение подсистем осуществлялось при помощи пакета Anfis на массиве экспериментальных данных, полученных при работе реального двигателя.

Рис. 4. Графическое представление полученных систем типа Сугено
Теперь можно выполнить оценку построенной системы ННВ для задачи автоматического управления. С этой целью воспользуемся программой просмотра правил системы MATLAB и введем значения входных переменных для частного случая. Процедура нечеткого вывода для разработанной нечеткой модели выдает в результате значение выходной переменной «output» (рис. 5).
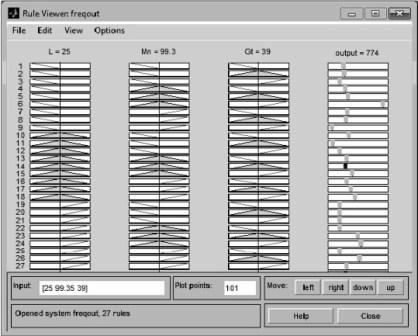
Рис. 5. Графический интерфейс программы просмотра правил после выполнения процедуры ННВ для значения входных переменных блока «Freq out»
Далее с блока «Freq out» сигнал поступает в подсистему «mode», которая необходима, во-первых, для определения режима работы двигателя и, во-вторых, для учета динамики и инерционности (рис. 6).
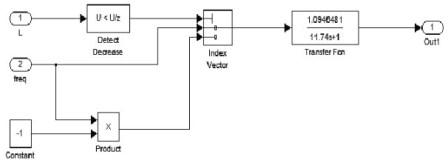
Рис. 6. Подсистема определения режима работы двигателя
Под режимами работы двигателя в данном случае подразумеваются режимы разгона и торможения. Параметры работы в режимах пуска и ограничения минимальной частоты вращения (холостой ход) заложены в систему во время обучения блока «Freq out». Для определения режима работы используется сигнал с датчика положения рейки ТНВД. При постоянном либо увеличивающемся угле открытия двигатель работает в режиме разгона, для чего с помощью управляемого коммутатора устанавливается положительный коэффициент для апериодического звена первого порядка, которое позволяет учитывать динамику и инерционность. При уменьшении степени открытия заслонки знак коэффициента меняется на отрицательный. Расчет коэффициента апериодического звена и постоянной времени производился на основе экспериментальных данных.
Теперь рассмотрим формирование функции ограничения максимальной частоты вращения, которая рассчитывается в подсистеме «Boundary system» (рис. 7).
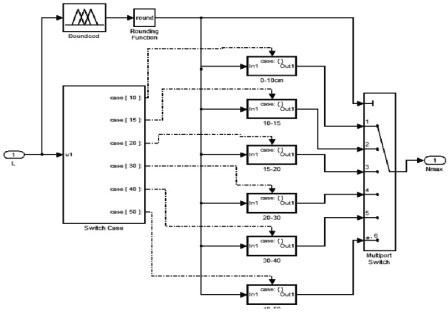
Рис. 7. Подсистема ограничения максимальной частоты вращения
В реальном двигателе максимальная частота вращения естественно ограничивается конструктивными и технологическими параметрами либо принудительно - системой управления двигателем. Созданная модель реализует оба типа ограничений. Ограничения системы управле-
ния закладываются в электронный блок управления на этапе его обучения. Технические и технологические ограничения реализуются с помощью подсистемы «ВоиМагу_8у81еш». Подсистема реализует линейно-кусочную функцию ограничения максимальной частоты вращения, основываясь на полученных экспериментальных данных.
Сигнал с датчика положения рейки ТНВД на входе попадает, во-первых, на блок «ВоиМсо^> и, во-вторых, на шесть подсистем формирования функций ограничения. Блок «ВоиМсо^> предназначен для определения зоны работы системы. Данный блок реализован на основе нечетких алгоритмов типа Мамдани (рис. 8). Его реализация возможна с помощью классических алгоритмов ветвления, однако такой способ, по нашему мнению, является более громоздким и ресурсоемким.
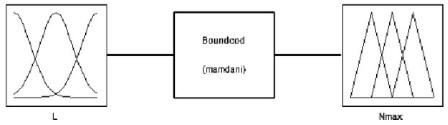
Рис. 8. Сгенерированная структура ННВ после определения входного и выходного сигналов переменного блока «Boundcod»
Изначально все шесть подсистем неактивны. После определения зоны работы блоком «Boundcod» он выдает сигнал на коммутатор активации подсистем генерации функций, который, в свою очередь, активирует только одну необходимую подсистему. Получив информацию о степени открытия дроссельной заслонки и сигнал активации, подсистема формирует необходимую функцию ограничения максимальной частоты вращения, используя коэффициент корреляции, полученный на основе экспериментальных данных. Далее сигнал с подсистемы поступает на многопортовый коммутатор, к которому подключены выходы всех подсистем. Получая информацию с блока «Boundcod», он коммутирует с выходом только ту систему, которая активна в данный момент. Сигнал с выхода подсистемы «Boundary_system» сравнивается с сигналом на выходе подсистемы «mode». Если сигнал подсистемы «mode» не превышает значения функции ограничения максимальной частоты вращения для данной зоны, он проходит на вход подсистемы «Delay». В случае превышения максимальной частоты вращения срабатывает коммутатор и далее используется значение максимальной частоты вращения для данной зоны.
Подсистема «Delay» необходима для моделирования переменной задержки сигнала обратной связи с датчика положения коленчатого вала двигателя (рис. 9), поскольку реальная система управления получает данные с разной скоростью, что напрямую зависит от частоты вращения коленчатого вала двигателя.
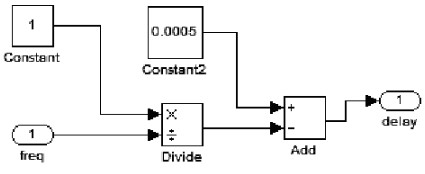
Рис. 9. Подсистема моделирования переменной задержки сигнала обратной связи датчика положения коленчатого вала двигателя
Расчет времени задержки построен на вычислении времени одного оборота коленчатого вала двигателя. Построение данной подсистемы потребовалось ввиду невозможности реализовать данный алгоритм работы исключительно с помощью стандартного блока «Variable time delay». После внесения временной задержки сигнал поступает на выход системы, и, таким образом, формируется сигнал, характеризующий частоту вращения коленчатого вала двигателя.
Перейдем к определению мощности на валу. После проведения сравнения с функцией ограничения максимальной частоты вращения сигнал, кроме блока «Delay», попадает также на мультиплексор, куда также подается сигнал с датчика положения рейки ТНВД. Формируется единый вектор входных значений, который подается на блок «Power». Задача блока «Power» -расчет мощности на валу двигателя. Блок «Power», так же как блок «Freq out», реализован на основе нечеткой системы типа Сугено. Ввиду ограниченного набора экспериментальных данных, полученных с нагрузочного стенда, и специфики работы гибридных сетей, сигнал с выхода блока «Power» проходит несколько элементов сравнения, которые позволяют сформировать граничные условия, обусловленные недостаточностью данных. После этого сигнал поступает на выход системы.
Проведем оценку точности полученной системы. Анализ результатов будем проводить в сравнении с данными, полученными в ходе экспериментов. В качестве основного критерия оценки возьмем остатки (разница значений для модели и экспериментальных данных). Коэффициент Пирсона для массива экспериментальных данных и массива остатков составил формулу (1) [б]. Это позволяет говорить об отсутствии линейной корреляции выходного сигнала и величины ошибки, а также об отсутствии накапливающейся ошибки.
где xi и yi - сравниваемые количественные признаки; n - число сравниваемых наблюдений.
Обобщенные данные для удобства восприятия сведены в табл. 2.
Таблица 2
Результаты сравнения экспериментальных и выходных данных модели свидетельствуют о том, что полученная система после испытания подтвердила свою адекватность реальному СД и возможность использования для разработки и тестирования на ее основе систем управления. Блочная структура модели позволяет адаптировать ее под конкретные судовые двигатели и сохранить эффективность при изменении требований к системе. Моделирование таких сложных объектов, как СД, позволяет отказаться от дорогостоящих стендовых испытаний и создания для этих целей специальных программно-аппаратных комплексов.
СПИСОК ЛИТЕРАТУРЫ
1. Крутов В. И. Автоматическое регулирование и управление ДВС. - М.: Машиностроение, 1989. - 416 с.
2. Надеев А. И., Хай Нгок Буй, Свирепов Ф. В. Интеллектуальное управление судовым двигателем внутреннего сгорания с учетом диагностики состояния оборудования // Вестн. Астрахан. гос. техн. ун-та. Сер.: Морская техника и технология. - 2011. - № 1. - С. 45-50.
3. Леоненков А. В. Нечеткое моделирование в среде МЛТЬЛБ и 1и22уТЕСН. - СПб.: БХВ-Петербург, 2005. - 736 с.
4. Мельников Д. А. Применение нейронных сетей в системах управления двигателя внутреннего сгорания // Материалы 65-й Междунар. науч.-техн. конф. Ассоциации автомоб. инженеров (ААИ) «Приоритеты развития отечественного автотракторостроения и подготовки инженерных и научных кадров» Междунар. науч. симпоз. «Автотракторостроение-2009». Кн. 2. - М.: МГТУ «МАМИ», 2009. - 227 с.
5. Ярушкина Н. Г. Основы теории нечетких и гибридных систем: учеб. пособие. - М.: Финансы и статистика, 2004. - 320 с.
6. Боровиков В. П. 8ТЛТ18Т1СЛ. Искусство анализа данных на компьютере: для профессионалов. -СПб.: Питер, 2003. - 688 с.
Статья поступила в редакцию 18.01.2012
ИНФОРМАЦИЯ ОБ АВТОРАХ
Надеев Альмансур Измайлович - Астраханский государственный технический университет; д-р техн. наук, профессор; зав. кафедрой «Электрооборудование и автоматика судов»; elmech@astu.org.
Nadeev Alimansur Izmailovich - Astrakhan State Technical University; Doctor of Technical Science,
Professor; Head of the Department "Electrical Equipment and Ship Automatics"; elmech@astu.org.
Буй Нгок Хай - Астраханский государственный технический университет; аспирант кафедры «Электрооборудование и автоматика судов»; hai_nht251083@yahoo.com.
Bui Ngoc Hai - Astrakhan State Technical University; Postgraduate Student of the Department "Electrical Equipment and Ship Automatics"; hai_nht251083@yahoo.com.
Головко Сергей Владимирович - Астраханский государственный технический университет; канд. техн. наук; доцент кафедры «Электрооборудование и автоматика судов»; elmech@astu.org.
Golovko Sergey Vladimirovich - Astrakhan State Technical University; Candidate of Technical Science, Assistant Professor of the Department "Electrical Equipment and Ship Automatics"; elmech@astu.org.
Свирепов Филипп Васильевич - Астраханский государственный технический университет; магистрант кафедры «Электрооборудование и автоматика судов»; philipp.88@mail.ru.
Svirepov Philip Vasilievich - Astrakhan State Technical University; Undergraduate of the Department "Electrical Equipment and Ship Automatics"; philipp.88@mail.ru.
Буй Нгок Хай, С. В. Головко, Ф. В. Свирепов
Источник: Журнал: Вестник Астраханского государственного технического университета. Серия: Морская техника и технология [Перейти]
МОДЕЛИРОВАНИЕ СУДОВОГО
ДИЗЕЛЯ КАК ОБЪЕКТА УПРАВЛЕНИЯ НА БАЗЕ НЕЧЕТКОЙ
ЛОГИКИ
Bui Ngoc Hai, S. V. Golovko, Ph. V. Svirepov
MODELLING OF THE SHIP DIESEL ENGINE AS AN OBJECT OF CONTROL ON THE BASIS OF FUZZY LOGIC
Bui Ngoc Hai, S. V. Golovko, Ph. V. Svirepov
MODELLING OF THE SHIP DIESEL ENGINE AS AN OBJECT OF CONTROL ON THE BASIS OF FUZZY LOGIC
Задача работы - создание адекватной модели судового дизеля на основе экспертных систем, учитывающей технические и технологические параметры конкретного двигателя. Модульная структура модели должна предоставлять возможность изменять алгоритмы управления объектом, что позволит оценить их эффективность и перспективность дальнейшего развития.
В качестве объекта управления был выбран дизель 6ЧН 15/18 (3Д6Н). Для повышения качества переходных процессов, происходящих в двигателе, при создании его модели было решено использовать нечетко-нейронные сети. В ходе серии экспериментов на нагрузочном стенде параллельно снимались и записывались массивы данных, характеризующие поведение системы управления и ответные реакции объекта управления. Был собран массив данных, характеризующий изменение мощности, выдаваемой двигателем в процессе работы. Моделирование проводилось с использованием пакета MATLAB Simulink. Полученная система после испытания подтвердила свою адекватность реальному судовому дизелю и возможность использования для разработки и тестирования на ее основе систем управления.
Ключевые слова: судовой дизельный двигатель, нечетко-нейронная сеть, объект управления, модульная структура.
The work problem is creation of adequate model of a ship diesel engine on the basis of expert systems which should consider technical and technological parameters of the certain engine. The modular structure of model should allow changing algorithms of management of object that will allow estimating their efficiency and perceptivity of their further development. As object of control the diesel engine 6ЧН 15/18 (3Д6Н) has been chosen. For improvement of quality of the transient processes occurring in the engine, it has been decided to use fuzzy-neural network at creation of its model. In the course of carrying out of experiments at the loading stand the data files characterizing behavior of the control system and responses of the control object have been registered. Also the data file characterizing change in capacity, produced by the engine in the course of work has been collected. Modelling was spent with use of package MATLAB Simulink. The received system after test has confirmed the adequacy to real diesel engine and possibility of its using for working out and testing on its basis of control systems.
Key words: the ship diesel engine, fuzzy-neural network, object of control, modular structure.
Судовой дизель (СД) как объект управления характеризуется существенной нелинейностью, нестационарностью. Сложность применения традиционных систем управления дизелем и отсутствие полной адекватной модели обусловили поиск новых методов оптимизации управления СД и описания его как объекта управления. Это объясняется недостаточной точностью и полнотой информации о его характеристиках и возмущениях, возникающих в процессе эксплуатации дизеля [1]. Имеющийся опыт проектирования и настройки систем регулирования позволяет считать целесообразным использование нечетко-нейронных сетей (ННС) для решения задачи повышения качества управления.
Целью исследований стало создание адекватной модели СД, которая должна учитывать технические и технологические параметры конкретного двигателя [2]. Модульная структура модели должна позволять изменять алгоритмы управления объектом, что даст возможность оценить их эффективность и перспективность дальнейшего развития. Для моделирования был выбран дизель 6ЧН 15/18(3Д6Н). По разработанной методике были получены экспериментальные данные с системы управления двигателем. Были проведены также стендовые испытания и получены нагрузочные характеристики.
Для разработки модели была проведена серия экспериментов на нагрузочном стенде. В процессе экспериментов параллельно снимались и записывались данные, характеризующие поведение системы управления и ответные реакции объекта управления. Были также собраны данные, характеризующие изменение мощности, выдаваемой двигателем в процессе работы.
Моделирование проводилось с использованием пакета MATLAB Simulink [3]. Модель объекта управления СД состоит из нескольких подсистем (рис. 1).
Рис. 1. Структура модели судового двигателя как объекта управления
Рассмотрим работу модели и каждую из подсистем подробнее. На входе система использует три сигнала, на выходе имеет два. Для удобства восприятия условные обозначения сигналов с расшифровками сведены в табл. 1.
Таблица 1 Параметры модели СД
| № | Тип сигнала | Сигнал | Переменная модели |
| 1 | Вход | Положение рейки ТНВД | L |
| 2 | Вход | Крутящий момент двигателя | Mn |
| 3 | Вход | Расход топлива | Gt |
| 4 | Выход | Развиваемая мощность двигателя | Power |
| 5 | Выход | Измеренная частота вращения коленчатого вала | Freq |
Первоначально входные сигналы поступают на мультиплексор, где формируется единый вектор входных значений, который далее подается на блок «Freq out». Задачей этого блока является расчет частоты вращения в соответствии с полученными входными данными (рис. 2) с применением нечетких алгоритмов типа Сугено (Sugeno). Этот тип называют еще гибридными сетями ввиду того, что они сочетают в себе достоинства нечетких алгоритмов и способность к обучению, которая является свойством нейронных сетей [4, 5].
Формирование функций принадлежности входных сигналов гибридной сети проводилось методом нечеткой кластеризации экспериментально полученных данных (рис. 3). Задачей нечеткой кластеризации является нахождение нечеткого разбиения или нечеткого покрытия множества элементов исследуемой совокупности, которые образуют структуру нечетких кластеров, присутствующих в рассматриваемых данных.
Рис. 2. Сгенерированная структура нейронечеткого вывода (ННВ) после определения входных и выходных переменных блока «Freq out»
Рис. 3. Формирование функций принадлежности входных сигналов методом нечеткой кластеризации
Эта задача сводится к нахождению степеней принадлежности элементов универсума искомым нечетким кластерам, которые в совокупности и определяют нечеткое разбиение или нечеткое покрытие исходного множества рассматриваемых элементов [3]. Для решения задачи нечеткой кластеризации использовался специализированный пакет Anfis из Fuzzy Logic Toolbox среды MATLAB.
Графически каждую из полученных подсистем Сугено можно представить так, как показано на рис. 4. Такое представление систем ННВ является общепринятым. Обучение подсистем осуществлялось при помощи пакета Anfis на массиве экспериментальных данных, полученных при работе реального двигателя.
Рис. 4. Графическое представление полученных систем типа Сугено
Теперь можно выполнить оценку построенной системы ННВ для задачи автоматического управления. С этой целью воспользуемся программой просмотра правил системы MATLAB и введем значения входных переменных для частного случая. Процедура нечеткого вывода для разработанной нечеткой модели выдает в результате значение выходной переменной «output» (рис. 5).
Рис. 5. Графический интерфейс программы просмотра правил после выполнения процедуры ННВ для значения входных переменных блока «Freq out»
Далее с блока «Freq out» сигнал поступает в подсистему «mode», которая необходима, во-первых, для определения режима работы двигателя и, во-вторых, для учета динамики и инерционности (рис. 6).
Рис. 6. Подсистема определения режима работы двигателя
Под режимами работы двигателя в данном случае подразумеваются режимы разгона и торможения. Параметры работы в режимах пуска и ограничения минимальной частоты вращения (холостой ход) заложены в систему во время обучения блока «Freq out». Для определения режима работы используется сигнал с датчика положения рейки ТНВД. При постоянном либо увеличивающемся угле открытия двигатель работает в режиме разгона, для чего с помощью управляемого коммутатора устанавливается положительный коэффициент для апериодического звена первого порядка, которое позволяет учитывать динамику и инерционность. При уменьшении степени открытия заслонки знак коэффициента меняется на отрицательный. Расчет коэффициента апериодического звена и постоянной времени производился на основе экспериментальных данных.
Теперь рассмотрим формирование функции ограничения максимальной частоты вращения, которая рассчитывается в подсистеме «Boundary system» (рис. 7).
Рис. 7. Подсистема ограничения максимальной частоты вращения
В реальном двигателе максимальная частота вращения естественно ограничивается конструктивными и технологическими параметрами либо принудительно - системой управления двигателем. Созданная модель реализует оба типа ограничений. Ограничения системы управле-
ния закладываются в электронный блок управления на этапе его обучения. Технические и технологические ограничения реализуются с помощью подсистемы «ВоиМагу_8у81еш». Подсистема реализует линейно-кусочную функцию ограничения максимальной частоты вращения, основываясь на полученных экспериментальных данных.
Сигнал с датчика положения рейки ТНВД на входе попадает, во-первых, на блок «ВоиМсо^> и, во-вторых, на шесть подсистем формирования функций ограничения. Блок «ВоиМсо^> предназначен для определения зоны работы системы. Данный блок реализован на основе нечетких алгоритмов типа Мамдани (рис. 8). Его реализация возможна с помощью классических алгоритмов ветвления, однако такой способ, по нашему мнению, является более громоздким и ресурсоемким.
Рис. 8. Сгенерированная структура ННВ после определения входного и выходного сигналов переменного блока «Boundcod»
Изначально все шесть подсистем неактивны. После определения зоны работы блоком «Boundcod» он выдает сигнал на коммутатор активации подсистем генерации функций, который, в свою очередь, активирует только одну необходимую подсистему. Получив информацию о степени открытия дроссельной заслонки и сигнал активации, подсистема формирует необходимую функцию ограничения максимальной частоты вращения, используя коэффициент корреляции, полученный на основе экспериментальных данных. Далее сигнал с подсистемы поступает на многопортовый коммутатор, к которому подключены выходы всех подсистем. Получая информацию с блока «Boundcod», он коммутирует с выходом только ту систему, которая активна в данный момент. Сигнал с выхода подсистемы «Boundary_system» сравнивается с сигналом на выходе подсистемы «mode». Если сигнал подсистемы «mode» не превышает значения функции ограничения максимальной частоты вращения для данной зоны, он проходит на вход подсистемы «Delay». В случае превышения максимальной частоты вращения срабатывает коммутатор и далее используется значение максимальной частоты вращения для данной зоны.
Подсистема «Delay» необходима для моделирования переменной задержки сигнала обратной связи с датчика положения коленчатого вала двигателя (рис. 9), поскольку реальная система управления получает данные с разной скоростью, что напрямую зависит от частоты вращения коленчатого вала двигателя.
Рис. 9. Подсистема моделирования переменной задержки сигнала обратной связи датчика положения коленчатого вала двигателя
Расчет времени задержки построен на вычислении времени одного оборота коленчатого вала двигателя. Построение данной подсистемы потребовалось ввиду невозможности реализовать данный алгоритм работы исключительно с помощью стандартного блока «Variable time delay». После внесения временной задержки сигнал поступает на выход системы, и, таким образом, формируется сигнал, характеризующий частоту вращения коленчатого вала двигателя.
Перейдем к определению мощности на валу. После проведения сравнения с функцией ограничения максимальной частоты вращения сигнал, кроме блока «Delay», попадает также на мультиплексор, куда также подается сигнал с датчика положения рейки ТНВД. Формируется единый вектор входных значений, который подается на блок «Power». Задача блока «Power» -расчет мощности на валу двигателя. Блок «Power», так же как блок «Freq out», реализован на основе нечеткой системы типа Сугено. Ввиду ограниченного набора экспериментальных данных, полученных с нагрузочного стенда, и специфики работы гибридных сетей, сигнал с выхода блока «Power» проходит несколько элементов сравнения, которые позволяют сформировать граничные условия, обусловленные недостаточностью данных. После этого сигнал поступает на выход системы.
Проведем оценку точности полученной системы. Анализ результатов будем проводить в сравнении с данными, полученными в ходе экспериментов. В качестве основного критерия оценки возьмем остатки (разница значений для модели и экспериментальных данных). Коэффициент Пирсона для массива экспериментальных данных и массива остатков составил формулу (1) [б]. Это позволяет говорить об отсутствии линейной корреляции выходного сигнала и величины ошибки, а также об отсутствии накапливающейся ошибки.
n n n (ХгУг ) - Z x Z
Уі r = . i=1 i=1 i=1 (1)
xy I n n n n (nZ x12 - x1 )2(nZ У12 - (Z У1)2)
V i=1 i=1 i=1 i=1
xy I n n n n (nZ x12 - x1 )2(nZ У12 - (Z У1)2)
V i=1 i=1 i=1 i=1
где xi и yi - сравниваемые количественные признаки; n - число сравниваемых наблюдений.
Обобщенные данные для удобства восприятия сведены в табл. 2.
Таблица 2
| № | Выходная переменная | Среднее значение ошибки | Среднее отключение ошибки | Коэффициент корреляции Пирсона |
| 1 | Частота вращения коленчатого вала | 0,45 | 15,7 (~0, 25 %) | 0,0б21 |
| 2 | Мощность на валу | 5,б7 | 10-7 0,б3 (1,7 %) | 0,0823 |
Результаты сравнения экспериментальных и выходных данных модели свидетельствуют о том, что полученная система после испытания подтвердила свою адекватность реальному СД и возможность использования для разработки и тестирования на ее основе систем управления. Блочная структура модели позволяет адаптировать ее под конкретные судовые двигатели и сохранить эффективность при изменении требований к системе. Моделирование таких сложных объектов, как СД, позволяет отказаться от дорогостоящих стендовых испытаний и создания для этих целей специальных программно-аппаратных комплексов.
СПИСОК ЛИТЕРАТУРЫ
1. Крутов В. И. Автоматическое регулирование и управление ДВС. - М.: Машиностроение, 1989. - 416 с.
2. Надеев А. И., Хай Нгок Буй, Свирепов Ф. В. Интеллектуальное управление судовым двигателем внутреннего сгорания с учетом диагностики состояния оборудования // Вестн. Астрахан. гос. техн. ун-та. Сер.: Морская техника и технология. - 2011. - № 1. - С. 45-50.
3. Леоненков А. В. Нечеткое моделирование в среде МЛТЬЛБ и 1и22уТЕСН. - СПб.: БХВ-Петербург, 2005. - 736 с.
4. Мельников Д. А. Применение нейронных сетей в системах управления двигателя внутреннего сгорания // Материалы 65-й Междунар. науч.-техн. конф. Ассоциации автомоб. инженеров (ААИ) «Приоритеты развития отечественного автотракторостроения и подготовки инженерных и научных кадров» Междунар. науч. симпоз. «Автотракторостроение-2009». Кн. 2. - М.: МГТУ «МАМИ», 2009. - 227 с.
5. Ярушкина Н. Г. Основы теории нечетких и гибридных систем: учеб. пособие. - М.: Финансы и статистика, 2004. - 320 с.
6. Боровиков В. П. 8ТЛТ18Т1СЛ. Искусство анализа данных на компьютере: для профессионалов. -СПб.: Питер, 2003. - 688 с.
Статья поступила в редакцию 18.01.2012
ИНФОРМАЦИЯ ОБ АВТОРАХ
Надеев Альмансур Измайлович - Астраханский государственный технический университет; д-р техн. наук, профессор; зав. кафедрой «Электрооборудование и автоматика судов»; elmech@astu.org.
Nadeev Alimansur Izmailovich - Astrakhan State Technical University; Doctor of Technical Science,
Professor; Head of the Department "Electrical Equipment and Ship Automatics"; elmech@astu.org.
Буй Нгок Хай - Астраханский государственный технический университет; аспирант кафедры «Электрооборудование и автоматика судов»; hai_nht251083@yahoo.com.
Bui Ngoc Hai - Astrakhan State Technical University; Postgraduate Student of the Department "Electrical Equipment and Ship Automatics"; hai_nht251083@yahoo.com.
Головко Сергей Владимирович - Астраханский государственный технический университет; канд. техн. наук; доцент кафедры «Электрооборудование и автоматика судов»; elmech@astu.org.
Golovko Sergey Vladimirovich - Astrakhan State Technical University; Candidate of Technical Science, Assistant Professor of the Department "Electrical Equipment and Ship Automatics"; elmech@astu.org.
Свирепов Филипп Васильевич - Астраханский государственный технический университет; магистрант кафедры «Электрооборудование и автоматика судов»; philipp.88@mail.ru.
Svirepov Philip Vasilievich - Astrakhan State Technical University; Undergraduate of the Department "Electrical Equipment and Ship Automatics"; philipp.88@mail.ru.