Кривошеев С.В.
Кафедра ЭВМ ДонНТУ
kryvosh@cs.donntu.ru
Аннотация
Кривошеев С.В. Особенности реализации интеллектуальных тренажерных комплексов на основе интегрированной навигационной системы. Данная статья посвящена особенностям реализации тренажерных комплексов на основе интегрированной навигационной системы. Описаны системы и подсистемы комплексов.
Ключевые слова: интеллектуальные тренажерные комплексы, интегрированная навигационная система, моделирование изображений, электронная картография.
Анотація
Кривошеєв С.В. Особливості реалізації інтелектуальних тренажерних комплексів на основі інтегрованої навігаційної системи. Дана стаття присвячена особливостям реалізації комплексів на основі інтегрованої навігаційної системи. Описано системи та підсистеми комплексів.
Ключові слова: інтелектуальні тренажерні комплекси, інтегрована навігаційна система, моделювання зображень, електрона картографія.
Abstract
Kryvosheev S. Features of intelligent training system on basis of integrated navigation system. This article deals with the features of realization training system on basis of integrated navigation system. The structures of system and subsystem are described.
Keywords: intelligent training systems, integrated navigation system, images modelling, electronic cartography.
Введение
Компьютерное моделирование для исследования технологических объектов и процессов, разработки управляющих систем и их включения в контур систем управления реальными объектами и процессами применяется в настоящее время очень широко. Оно позволяет проводить разносторонние эксперименты и ускоряет процесс проектирования нового оборудования.
Проблемы повышения безопасности судоходства в стесненных условиях, экономии энергоресурсов требуют разработки систем автоматического управления движением судна по заданному фарватеру. Эти системы управления носят название интегрированные навигационные системы (ИНС) для судов внутреннего и смешанного плавания [1]. Однако применение новых технологий требует высокой эффективности профессионального обучения пользователей подобных систем, которую можно достичь путем использования тренажерных средств.
Развитие информационных технологий позволило отказаться от механических и электромеханических способов реализации тренажеров и тем самым достичь высокой интеллектуализации конечного продукта. Применение вычислительной техники привело к наличию двух категорий тренажерных комплексов: программные (обучающие программы и автоматизированные рабочие места на основе компьютера) и аппаратно- программные (программный комплекс и элементы реального устройства). Применение таких продуктов значительно повысило качество подготовки специалистов.
Обучающие программы представляют собой самую простейшую реализацию, комплексные тренажерные системы являются самой сложной реализацией. Между ними образуется интервал, который призваны заполнить интеллектуальные тренажерные комплексы. Эти комплексы обладают свойствами и обучающих программ, и комплексных тренажеров. Главная их задача – отображение реального информационного пространства с сохранением основных характеристик информации. Этим достигается информационно-интеллектуальное подобие деятельности оператора.
Суть обучения оператора состоит в получении навыков управления некоторым объектом посредством изменения управляющих параметров. Информацию о состоянии объекта он получает от устройств визуализации. От результатов анализа состояния объекта зависит эффективность принятых решений по управлению объектом.
Отличие интеллектуальных систем от комплексных заключается в том, что первые используют для визуализации мониторы, а не проекционные экраны, а также используют в качестве силовых элементов программно реализованные математические модели этих устройств.
Одним из вариантов построения интеллектуальных тренажерных систем является использование в них элементов реальных систем автоматического управления, например ИНС.
В обобщенном виде принцип действия ИНС для судов внутреннего и смешанного плавания можно представить следующим образом: априорная информация о характеристиках заданного участка местности, имеющаяся на борту (например, электронная карта местности), сравнивается с текущей информацией, поступающей от бортовых датчиков. В результате сравнения определяется истинное местоположение объекта и на основе полученных координат вырабатываются управляющие воздействия в блоке управления исполнительными механизмами (руль и силовая установка).
Типовая конфигурация ИНС включает в себя следующие основные блоки: бортовые датчики информации, базы априорных знаний, блок определения местоположения судна, блок оценки навигационной обстановки, блок визуализации и диалога с судоводителем, блок управления исполнительными механизмами (рис. 1).
Описание одной из современных разработок ИНС такого типа
приведено в [1, 2]. Стандартный набор бортовых датчиков [3] можно
разделить на датчики «образной» (радиолокационная станция – РЛС,
лазерный сканер, видеокамера) и «необразной» (доплеровский лаг,
гироскоп, приемники сигналов радионавигационных систем) информации.
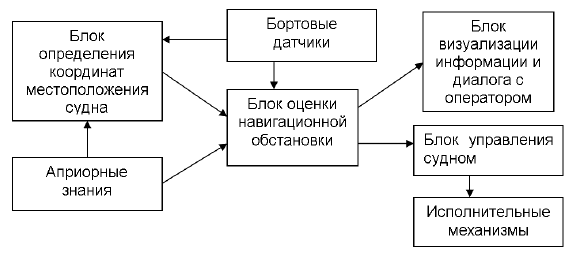
Рисунок 1 – Конфигурация интегрированной навигационной системы
В состав ИНС входят бортовой компьютер со специализированным ПО, различные устройства, передающие управляющие воздействия на органы управления судном, а также вспомогательное оборудование, обеспечивающее связь между стандартными навигационными устройствами, такими как эхолот, РЛС и др.
В задачи ИНС входят такие важные задачи, как прокладка курса и управлением судном в тяжелых условиях плавания, контроль за всеми судовыми устройствами, ответственными за управление судном.
Таким образом, при построении тренажерного комплекса на основе ИНС необходимо заменить датчики и исполнительные механизмы математическими моделями. Для интерпретации навигационной обстановки должен входить блок генерации изображений от РЛС, который структурно можно представить следующим образом: модели участников движения, генератор помех, генератор отраженных лучей, электронная карта, компоновщик (рис. 2). Для моделирования участников движения применяются математические модели описания динамики судна приведенные в [1, 2, 4]. Электронная карта в данной подсистеме служит как основа для генерации изображения. Кроме того, электронная карта используется для визуализации навигационной обстановки вокруг судна.
Использование электронной картографии позволяет судоводителям улучшить навыки организации работы, а также проводить обучение в реальных районах судоходства.
Математическая модель судна базируется на системах уравнений
движения судна на основании законов кинематики и динамики твердого
тела, а также теории силового воздействия жидкости на движущееся тело,
что позволяет моделировать практически любое водное транспортное
средство.
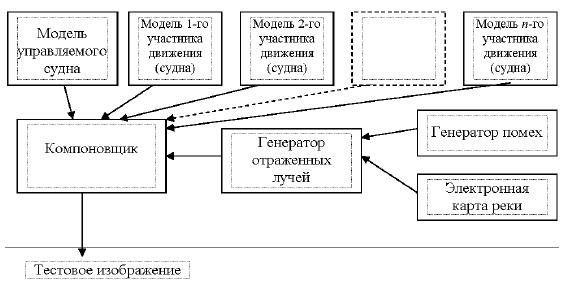
Рисунок 2 – Структурная схема блока моделирования изображений местности от радиолокационной станции для интегрированной навигационной системы
Для моделирования участников движения применяются те же математические модели описания динамики судна, что и базового судна. Влияние ветра и течения реки на движение судна описывается как стохастический процесс.
При многопользовательском режиме обучения динамика судна на котором отрабатываются навыки управления моделируется отдельно на компьютере обучаемого. Динамика остальных участников движения и навигационная обстановка формируется на центральном компьютере (сервере).
В реальных условиях рабочее место судоводителя составляют органы управления исполнительными механизмами и контроля состояния судна. При использовании ИНС данные органы при построении тренажерного комплекса идентичны. Это вызвано тем, что ИНС включается в контур управления [5], не модифицируя аппаратуру управления и контроля. Однако при построении алгоритмов и моделей для тренажера необходимо учитывать тот фактор, что информационное отражение измеряемых параметров на реальном и учебном объекте должно быть полностью идентично. Особенностью реализации информационных потоков в тренажерном комплексе является то, что данные в них известны – это выходные (т.н. «истинные») параметры блока определения координат местоположения судна. Однако входные данные для него получены путем зашумления значений полученных с помощью математических моделей датчиков, динамики судна и исполнительных механизмов с использованием алгоритмов, которые отражают динамику накопленных погрешностей и особенности работы устройств.
Использование ИНС представляет возможным построение распределенных тренажерных комплексов, что позволит одновременную подготовку нескольких судоводителей в пределах некоего учебного района навигации.
Заключение
Построение интеллектуальных тренажерных комплексов на основе интегрированной навигационной системы обеспечивает адекватность отработки учебных задач, что позволяет получить высокую учебную эффективность комплекса. Это достигается за счет состава (способность одновременной подготовки) и возможностей подсистем комплекса (аналогичные реальной ИНС). В основу подготовки судоводителя закладываются реальные условия, регламентированные нормативными документами.
Литература
1. Bittner R., Driescher A., Gilles E.D. Entwurf einer Vorsteuerung zur hochgenauen Bahnführung von Binnenschiffen. 3. Wismarer Automatisierungssymposium, September 2002, S.4-11
2. Zimmermann R. Repräsentation dynamischer Schiffsmodelle in einem Navigationssystem für die Binnenschiffahrt. Doktorarbeit, Universität Stuttgart, 2000. – 152 S.
3. Кривошеев С.В., Потапенко В.А. Подходы к моделированию работы интегрированных навигационных систем для судов внутреннего и смешанного плавания //Наукові праці Донецького державного технічного університету. Серія: Інформатика, кібернетика та обчислювальна техніка, вип. 6. – Донецьк: ДонДТУ. – 1999. С.115-120.
4. Аноприенко А.Я., Кривошеєв С.В. Информационно-программное обеспечение интегрированной навигационной системы. Збірка наукових праць міжнародної наукової конференції «Інтелектуальні системи прийняття рішень та прикладні аспекти інформаційних технології ISDMIT’2006». Т.3. Євпаторія, 2006 – с.90-93
5. Святный В.А., Кривошеев С.В. Автоматизация судовождения на основе интегрированной навигационной системы для речных судов. Збірка наукових праць міжнародної наукової конференції «Інтелектуальні системи прийняття рішень і проблеми обчислювального інтелекту ISDMCI’2008». Т.1 (ч.2). Євпаторія, 2008 – с.60-63