Моделирование и анализ процесса разгона мостового крана
Автор: Е.В. Комерзан, О.М. Кирасиров
Источник: Вестник РГРТУ. № 4 (выпуск 26). Рязань, 2008.
Аннотация
Е.В. Комерзан, О.М. Кирасиров. Моделирование и анализ процесса разгона мостового крана. Представлены основные этапы разработки системы автоматизиро-ванного моделирования процесса разгона крана. В качестве основного пара-метра используется закон изменения момента электродвигателя, его меха-нические характеристики. Моделирование процесса разгона осуществляетсяв программе Solid Works приложения Cosmos Motion.
Введение
Автоматизированное проектирование представляет собой технологию использования вычислительных систем для оказания помощи проектировщикам при разработке, модификации, анализе или оптимизации проектных решений. Целью автоматизированного проектирования является сокращение времени разработ-ки и испытаний проектируемого объекта, а также обеспечение качества и снижение затрат при производстве.
Процесс передвижения крана по рельсовому пути состоит из трех режимов: разгона, движения с постоянной скоростью и торможения. Под процессом разгона следует понимать способность привода передвижения сообщить мосту (грузовой тележке крана) некоторую скорость движения, начиная с нулевой. Оптимальным следует считать такой способ разгона грузо- подъемных кранов, передвигающихся по рельсовому пути, который уменьшает колебания груза и динамические нагрузки, а также создает наиболее благоприятные услови
Грузоподъемные краны работают в режиме повторно-кратковременного включения механизмов, характеризующихся частыми пусками и остановками. Переходные процессы оказывают одно из решающих значений на эксплутационные показатели работы кранов. Одним из важнейших направлений при изучении данного вопроса является оптимизация переходных процессов, возникающих при передвижении мостовых кранов, а также создание устройств и автоматизированных систем управления кранами, обеспечивающих рациональное управление при пуске.
Исследование переходных режимов работы кранов связано с определением закономерностей возникновения динамических нагрузок и улучшением эксплутационных показателей машины, путем оптимизации переходных процессов.
Основная часть
Современное управление краном должно обеспечивать высокую плавность пуска и остановки всех механизмов крана, регулирование скоростей подъема, опускания и перемещения груза в широких пределах.
В настоящее время задача получения высокой плавности регулирования достигается путем совершенствования программ микроконтроллеров и оптимизацией параметров управления электроприводом. Иными словами, повышение степени автоматизации управления работой крана дает возможность максимально эффективно использовать силовые и скоростные возможности крана
В соответствии с вышеизложенным необходимо решать задачу не только способа управления, но и определения рационального закона изменения момента электродвигателя, который обеспечивал бы реализацию идеального процесса разгона. В свою очередь, идеальный процесс разгона мостового крана характеризуется тем, что некоторые основные величины такие, какмаксимальная амплитуда отклонения груза; максимальная динамическая нагрузка на металлоконструкцию; интенсивные упругие колебания в приводе и металлоконструкции при работе электродвигателя на неустойчивой ветви механиче-ской характеристики; время разгона и некоторые другие принимают наиболее приемлемые значения. При проектировании механизмов передвижения кранов возникает задача выбора такой системы управления, которая обеспечивала бы максимальное быстродействие при высоком качестве переходных процессов.
Актуальной является задача повышения технико-эксплутационных показателей работы грузоподъемных кранов мостового типа путем анализа динамических процессов с разработкой системы автоматизированного проектирования процесса разгона
В настоящее время на предприятиях машиностроения и краностроительных заводах широко внедряются в производство современные системы управления электроприводом. К ним, в частности, относятся преобразователи частоты, которые предназначены для управления работой асинхронного электропривода с короткозамкнутым ротором.
Относительно недавно механизмы передвижения мостовых кранов оснащались приводом от асинхронного электродвигателя с фазным ротором с системой ручного или полуавтоматического управления в период пуска. Сложность управления в период пуска такой системы состоит в том, что возникает необходимость рассчитывать пуск асинхронного электродвигателя, т.е. осуществлять переключение роторных резисторов в тот момент времени, когда движущий момент снизится до минимального. Реализовать такой закон разгона можно только при автоматическом управлении двигателем, например с помощью системы запуска в функции времени с коррекцией по току ротора.
Более прогрессивным и современным в настоящее время приобретающим все большее распространение при оборудовании механизмов передвижения является асинхронный электро-привод с короткозамкнутым ротором с системой частотного управления. К системе частотного управления предъявляются следующие требования: быстрота и точность перемещений, экономичность и возможность интеграции в автоматизированные системы. Преобразователи частоты строятся по модульному принципу и состоят из нескольких силовых компонентов: блока питания/рекуперации и инверторов, которые могут подключаться к любым приводам (подъемный механизм, крановая тележка, привод перемещения крана). В единое целое все компоненты связывает электронная промышленная сеть передачи данных. Благодаря построению системы на основе такой концепции любые движения механизмов крана могут осуществляться одновременно, например: механизма подъема и грузовой тележки, механизма передвижения грузоподъемного крана и тележки.
Преобразователи частоты позволяют получать требуемый процесс разгона способом изменения частоты подводимого напряжения, таким образом изменяя частоту вращения и момент. В научной литературе по электроприводу и в научных статьях недостаточное внимание уделено этому вопросу и в целом нет ясности в вопросе,каким образом на примере механических характеристик происходит плавный переход с одной характеристики на другую.
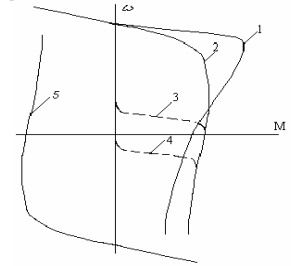
Рисунок 1 - Пример механических характеристик асинхронного электропривода с короткозамкнутым ротором при частотном управлении
Авторы предполагают, что преобразователи частоты позволяют получать множество характеристик на подобных кривым 1,2,3 для процесса разгона и 4,5 для процесса торможения (рисунок 1). Механическая характеристика 2 получается при использовании функции ограничения момента при векторном управлении и позволяет формировать характеристику экскаваторного типа. Множество характеристик обеспечивают плавный переход с одной характеристики на другую в точках пересечения или касания.
В таких условиях особое значение приобретает возможность на основании входных данных электропривода смоделировать процесс разгона и в результате получить основные динамические характеристики, такие как скорость, ускорение, путь, угол отклонения грузовых канатов от вертикали, время разгона и др.
Такие расчеты может выполнять программа Solid Works приложение Cosmos Motion
Для решения поставленной задачи для моделирования процесса разгона мостового крана была разработана система автоматизированного проектирования. Важными в практическом исследовании динамических систем являются современные технологии компьютерного моделирования. В последнее время значительно возрос интерес в различных отраслях промышленности к созданию автоматизированных систем проектирования, конструирования и технологической подготовки производства. Это вызвано, прежде всего, необходимостью обеспечивать качественный рост свойств и характеристик разрабатываемых образцов новой техники по сравнению с зарубежными и отечественными прототипами при одновременном сокращении затрат, необходимых для их серийного производства и эксплуатации.
Для разработки системы автоматизированного проектирования переходных процессов была создана трехмерная твердотельная модель мостового крана грузоподъемностью 20/5 т и пролетом 28.5 м. Наиболее известными CAD/CAM – системами являются: AutoCAD 2000, Mechanical Desktop, Cimatron, Master cam, Solid Works, MicroStation Modeler, Pro/Desktop идр. Компания Solid Works создает пакеты твердотельного моделирования на базе геометрического ядра Parasolid. Сейчас система входит в число ведущих систем среднего уровня [3]. Преимущество программы твердотельного моделирования Solid Works состоит в том, что позволяет в режиме реального времени наглядно наблюдать за процессом разгона. Для проведения исследований динамических процессов грузоподъемных кранов мостового типа и для оптимального подбора динамических характеристик, т.е. для проектирования динамической системы в нашей работе будет использовано приложение COSMOS Motion программы Solid Works. COSMOS Motion - это усеченный вариант программы MSC. ADAMS. Это один из наиболее популярных продуктов, предназначенных для расчета кинематики и динамики. Программа позволяет назначать движения и двигатели различных типов, в том числе и с использованием библиотеки функции MSC.ADAMS.
Разработка системы автоматизированного проектирования процесса разгона включает ряд
этапов:
1) выбор исследуемой модели и ее параметров;
2) создание трехмерных моделей деталей в Solid Works;
3) создание сборки мостового крана с определением взаимосвязей в сборке (подготовка геометрической твердотельной модели);
4) формирование возмущающих воздействий;
5) методика расчета входных величин в программе Excel;
6) реализация визуализации кинематики мостового крана с отображением результатов динамического расчета;
7) оптимальный подбор динамических характеристик, т.е. проектирование динамической системы.
Проектирование осуществляется с целью получения оптимальных динамических характеристик процесса разгона с учетом силовых и скоростных возможностей крана. Для использования в качестве объекта проектирования предлагается использовать привод механизма передвижения мостового крана грузоподъемностью 20/5 т пролетом 28.5 м.
На начальном этапе производится создание трехмерных моделей деталей по геометрическим параметрам реальных деталей крана. В режиме «деталь», которая представляет собой параметрическую элементно-ориентированную среду, строятся твердотельные модели деталей крана. На втором этапе в режиме «сборка» с помощью соответствующих инструментов выполняем объединение компонентов в сборку. Сборка компонентов осуществляется при помощи сопряжений, которые ограничивают их степень свободы. Благодаря поддержке динамических свойств конструкции в программе Solid Works получаем анимационную модель функционирующей сборки.
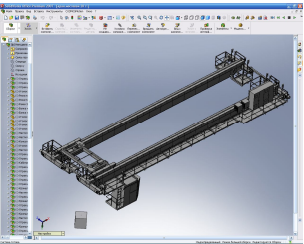
Рисунок 2 - Разработанная трехмерная модель мостового крана грузоподъемностью 20/5 т, пролетом 28.5 м в программе Solid Works
При передвижении крана основной характеристикой, которая задает параметры процесса разгона, является приведенная к ободу ходовых колес движущая сила электропривода. Так как объектом нашего исследования является электропривод механизма передвижения с короткозамкнутым ротором, то в этом случае будем использовать методику уточненного расчета меха- нических характеристик. Эта методика позволяет рассчитывать механическую характеристику по каталожным данным [2]. В результате расчета получаем зависимость момента от частоты вращения. Данный расчет производится в программе Excel.
Полученные данные зависимости момента от частоты вращения используем в приложении COSMOS Motion программы Solid Works. Далее задается генератор движения, т.е. приложение нагрузки или задание движения. Для представ-ленной модели задаем крутящий момент на два приводных колеса в зависимости от частоты вращения. Дополнительно следует выполнить ряд операций: определяем подвижные и неподвижные детали, задаем 3 D контакт, задаем материал поверхности трения. Момент задается следующим образом. В активном окне приложения COSMOS Motion в группе деталей Moving Parts для ходового колеса подаем команду Add Force – Action Only – Moment [1]. Для заполнения появившегося окна Insert указываем вторую деталь - рельс, что означает задание параллельности движения относительно этих деталей. Нажимая вкладку Function, выбираем Spline. В появившихся двух окнах следует задать параметры частоты вращения и крутящего момента из расчета, выполненного в программе Excel. Аналогичную операцию следует выполнить и для второго приводного колеса. Запуск расчета осуществляется нажатием кнопки Play на панели инструментов. После рассмотрения результатов возможно выполнить модифицирование конструкции изменением различных параметров.
После выполнения расчета отображаются графики зависимости результатов от времени. Результаты моделирования представлены в виде графиков на фоне модели сборки Solid Works.
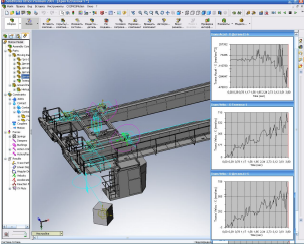
Рисунок 3 - Разработанная 3D модель мостового крана в среде приложения COSMOS Motion с результатами моделирования
Программа рассчитывает следующие динамические характеристики:
-скорости и ускорений концевых балок моста крана;
-путь проходимый концевыми балками в период разгона;
-скорости ускорения главных балок в середине пролета;
-скорость движения крана и груза;
-углы отклонения грузовых канатов от вертикали.
Выводы
Авторами представлена методика моделирования процесса разгона мостовых кранов. Основное преимущество заключается в том, что разработчик на этапе проектирования наблюдает ход симуляции трехмерной модели в режиме реального времени, которое сопровождается движением крана и груза. При этом программа позволяет легко выполнять модифицирование конструкции.
Список использованной литературы
1. Норенков И.П. Основы автоматизированного проектирования. – М.: Изд-во МГТУ им. Н.Э. Баумана, 2006. – 448 с. 2. Ахтулов А.Л., Кирасиров О.М., Комерзан Е.В.Теоретическое исследование и моделирование про- цесса разгона грузоподъемного крана мостового типа // Омский научный вестник. – 2008. – № 1. – С.59 - 63. 3. Solid Works. Компьютерное моделирование в инженерной практике/ А.А. Алямовский, А.А. Собачкин, Е.В. Одинцов. – СПб.: БВХ - Петербург, 2006. –800 с.