Аннотация
Абакумов И.В. - Разработка и исследование методов гашения колебаний груза в мостовых кранах. Исследованы методы управления электроприводом передвижения тележки мостового крана для обеспечения гашение колебаний перемещаемого груза. Для модели мостового крана, учитывающей изменение длины каната в процессе работы создана система модального управления, позволяющая эффективно гасить колебания груза при любом значении длины каната.
Мостовые краны широко используются в разных отраслях промышленности. Они осуществляют горизонтальные перемещения грузов, использую механизмы поступательного движения. При этом в процессе движения возникают колебания груза, которые существенно влияют на энергетические показатели работы электроприводов, увеличивают механические нагрузки в передаточных механизмах, увеличивают продолжительность производственного цикла и создают угрозу возникновения аварийных ситуаций. Это обуславливает необходимость внедрения мер по гашению колебаний груза.
В литературе часто описывают методы, основанные на применении задатчиков траектории движения или темпа разгона для электроприводов тележки и моста [1, 2, 3]. Каждый из приведенных законов обладает как преимуществами, так и недостатками.
Объектом исследований является компьютерная модель мостового крана.
Цель работы – исследование методов управления электроприводом передвижения тележки мостового крана, обеспечивающих гашение колебаний перемещаемого груза.
Получены формулы для расчета трехэтапных диаграмм разгона, обеспечивающих гашение колебаний груза при подержании постоянного ускорения или силы на каждом из этапов (см. рис.1).
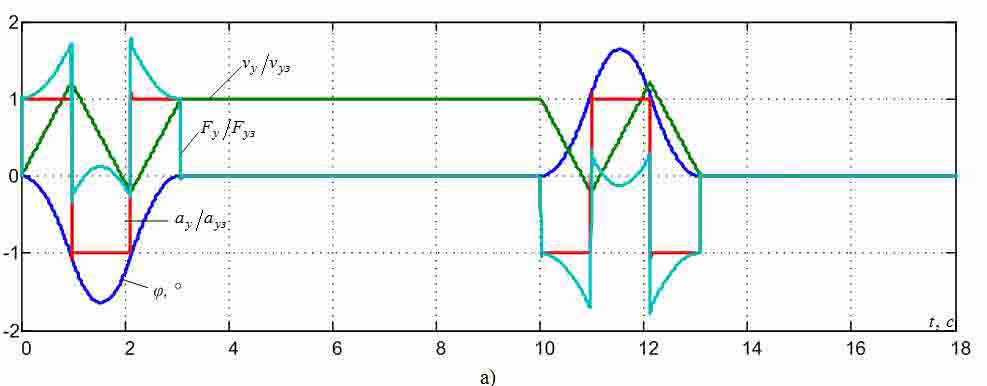
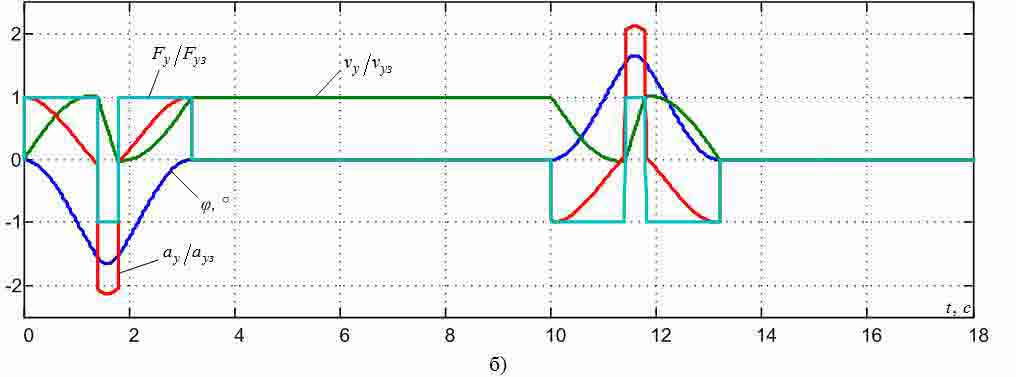
Рисунок 1 – Гашение колебаний груза с помощью трехэтапных диаграмм разгона: а) с постоянным ускорением; б) с постоянным усилием
Установлено, что эффективность гашения колебаний груза при применении таких законов управления электроприводами существенно снижается, если длина каната определена неточно или она меняется во время движения.
Предложено применить систему модального управления с обратной связью по полному вектору состояния системы. Получены аналитические выражения для расчета коэффициентов модального регулятора при управлении скоростью тележки. Учитывая, что показателем эффективности законов управления является время отработки заданного перемещения, дополнительно были рассчитаны коэффициенты модального регулятора при управлении перемещением тележки. Регулятор выполнен в виде функции, рассчитывающей коэффициенты в функции текущего значения длины каната. Графики переходных процессов, свидетельствующие об эффективности такого подхода, приведены на риc.2.

Рисунок 2 – Переходные процессы в системе модального управления
Исследования показали, что качество переходных процессов существенно зависит от величины среднегеометрического корня характеристического полинома системы. Выбор его оптимального значения является целью дальнейших исследований. Также в дальнейшем планируется синтезировать наблюдатель состояния и идентификатора длины каната, необходимые для практической реализации предложенного алгоритма управления.
ВЫВОДЫ
В данной работе для модели мостового крана, учитывающей изменение длины каната в процессе работы создана система модального управления, позволяющая эффективно гасить колебания груза при любом значении длины каната.
Наиболее существенные научные и прикладные результаты, выводы и рекомендации заключаются в следующем:
- Применение трехэтапных диаграмм разгона позволяет эффективно гасить колебания груза при условии, что длина каната определена точно, а начальное значение угла отклонения груза от вертикали равно нулю.
- Система модального управления обеспечивает желаемое качество переходных процессов при изменении длины каната в процессе перемещения.
Список використаної літератури
- A. Buch. Optimale Bewegungssteuerung von schwingungsfahigen mechatronischen Systemen mit zwei Freiheitsgraden am Beispiel eines Krans mit Pendelnder Last und elastischer Mechanik – Magdeburg, 1999. – 250 S.
- Герасимяк Р.П. Анализ и синтез крановых электромеханических систем /Р.П. Герасимяк, В.А. Лещев. – Одесса, СМИЛ, 2008. – 191 с.
- Толочко О.И., Бажутин Д.В. Сравнительный анализ методов гашения колебаний груза, подвешенного к механизму поступательного движения мостового крана / Міжвідомчий науково-технічний журнал «Електромашинобудування та електрообладнання» №75 – Київ: «Техніка», 2010. – С.22-28
- Толочко О.І. Аналіз та синтез електромеханічних систем зі спостерігачами стану: [Навчальний посібник] для студентів вищих навчальних закладів / О.І. Толочко. – Донецьк: Норд-Прес, 2004. – 298 с.
- Толочко О.І., Бажутін Д.В. Розробка моделей мостового крану із урахуванням зміни довжини канату / Наукові праці Донецького національного технічного університету. Серія: “Електротехніка і енергетика”, випуск 11 (186), Донецьк: ДВНЗ «ДонНТУ», 2011. С. 388-391