
Реферат за темою випускної роботи
Зміст
- Вступ
- 1. Актуальність теми
- 2. Мета і задачі дослідження та заплановані результати
- 3. Загальна характеристика і класифікація приводів роботів
- 4. Наявні наробки у візуальному управлінні мобільним роботом
- 5. Експериментальна платформа
- 5.1 Мобільний робот Koala K-Team
- 5.2 Веб-камера LogitechC310 HD
- 6. Система візуального керування роботом
- 6.1 керування мобільним роботом Koala із середовища Simulink
- 6.2 Автомобілі Брайтенберга
- 7. Демонстраційний режим робота Коала
- Висновки
- Перелік посилань
Вступ
В рамках даної роботи планується до розробляти мобільну систему, яка працює на основі відеоінформації, а саме керує мобільним колісним роботом щоб той уникав перешкоди на своєму шляху та рухався на джерело світла. Існує потреба у вдосконаленні алгоритмів візуального керування рухом мобільного робота, використовуючи нові методи прийому інформації та її трансформації.
1. Актуальність теми
Актуальність даної роботи полягає в тому, щоб розширити можливості поведінки робота в невідомому середовищі, підвищити його автономність, використовуючи системи штучного зору.
2. Мета і задачі дослідження та заплановані результати
- Математичне моделювання системи електроприводу постійного струму мобільного робота;
- Складання схеми керування мобільним роботом в розширенні Simulink програмного пакету MATLAB;
- Реалізація підключення Веб-камери LogitechC310 HD;
- Створення та вдосконалення алгоритмічної системи керування роботом на основі потоку світла;
- Експериментальне дослідження схем
обминання перешкод
тапереміщення в напрямку світла
.
3. Загальна характеристика і класифікація приводів роботів
За типом керування приводи можуть бути розімкнутими з позиціонуванням по упорах, розімкненими з цифровим керуванням і застосуванням як двигунів крокових електромоторів або складових циліндрів (позиціонерів), замкнутими або слідкуючими із зворотними зв'язками по положенню і деякими іншими параметрами (по швидкості, силі та інші). Слідкуючі приводи на базі гідравлічного та електричного двигунів знайшли широке застосування в роботах і є найбільш перспективними. За способом використання, надходженню і відводу енергії від механічної системи розрізняють активний і пасивний приводи. В активному приводі використовуються активні сили, створювані двигуном, в пасивному - гальмівні сили, що відбираються від механічної системи [2]. Переважне застосування в роботах знайшли активні приводи.
Вибір того чи іншого виду приводу зумовлений функціональним призначенням робота, що пред'являються до нього технологічними вимогами, особливостями виробництва та умовами експлуатації, а також вартістю, складністю обслуговування, експлуатаційними витратами, наявністю тих чи інших комплектуючих виробів та їх якістю. Вибір приводу повинен здійснюватися спільно з визначенням типу та структури системи керування [2]. Першочерговим питанням, яким вирішуються при проектуванні або використанні робота, є вибір того чи іншого типу приводу по виду енергоносія.
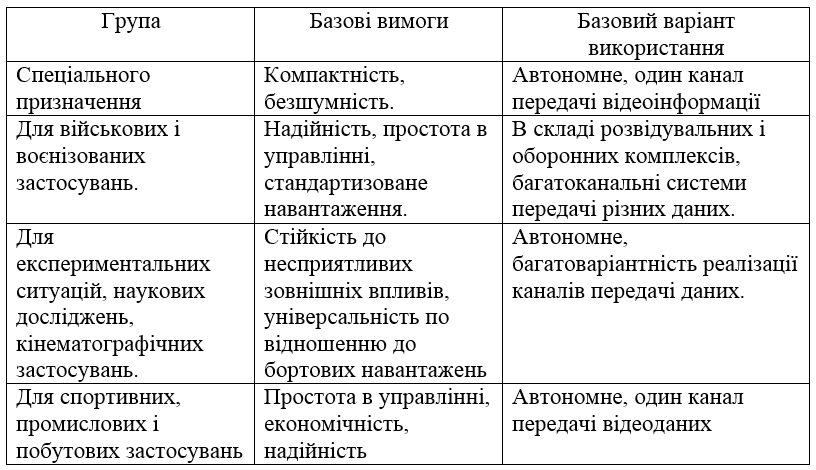
Таблиця 3.1 - Класифікація мобільних роботів по функціональному призначенню
4. Наявні наробки у візуальному управлінні мобільним роботом
Кафедра ЕАПУ сумісно з університетом Сержі-Понтуаз (лабораторія ЕТІС) займалась вивченням питань візуального керування роботом (магістр Зайцев М.). В минулому році були проведені досліди, пов’язані з дослідженням можливостей робота уникати перешкоди. Основними задачами були:
- розробка та удосконалення систем керування мобільним роботом на основі оптичного потоку, що розраховувався з даних бортової камери;
- проектування нейронної мережі, яка дала змогу співвіднести значення оптичного потоку зі поточною швидкістю мобільного робота.
Була спроектована і промодельована система керування роботом в функції оптичного потоку. Вона приведена на рисунку 4.8.
Дана модель включає в себе наступні основні блоки:
- блок отримання зображення із камери;
- блок розрахунку величин двох частин зображення;
- блок, який задає швидкість кожного колеса.
- блок розрахунку оптичного потоку;
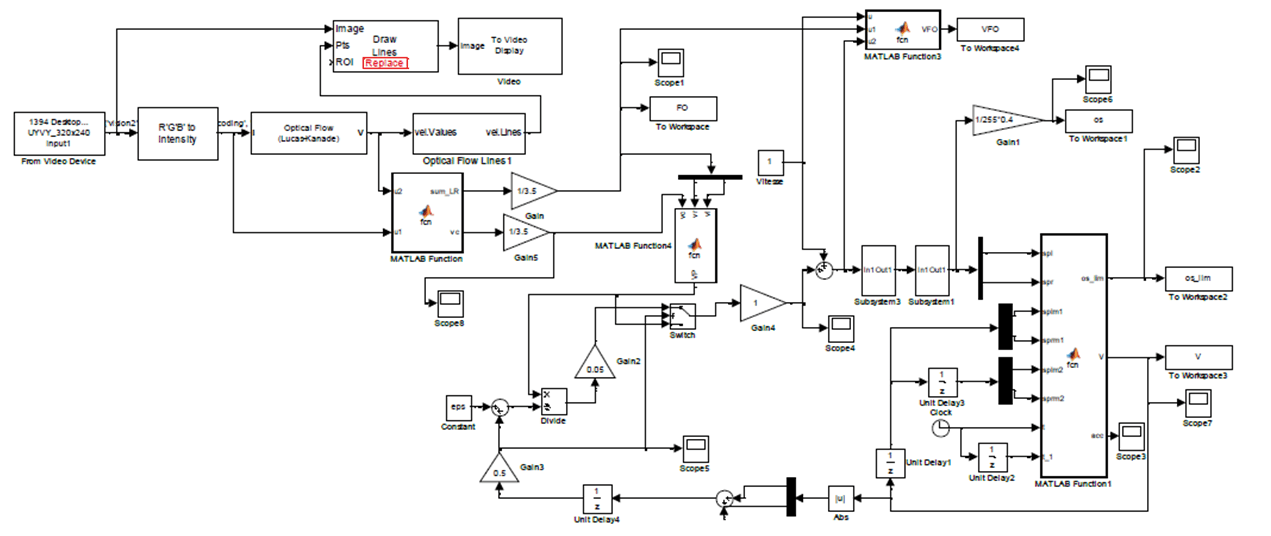
Рисунок 4.1 – Схема візуального керування мобільним роботом в MATLAB/Simulink для уникання перешкод
Ця схема формує завдання на швидкість обертання коліс пропорційно зміні оптичного потоку. В нашій роботі не виконується розрахунок оптичного потоку (двовимірне диференціювання), що значно знижує навантаження на обчислювальний пристрій системи керування.
5. Експериментальна платформа
5.1 Мобільний робот Koala K-Team
Об’єктом всіх дослідів був мобільний робот Коала. Це мобільній робот середніх розмірів. Робот оснащений двома блоками по три бокових колеса з максимальною швидкістю 0,4 м/с, колеса мають радіус 45 мм і встановлюється на осі завдовжки 32 см. Маса робота складає 3,6 кг [4].
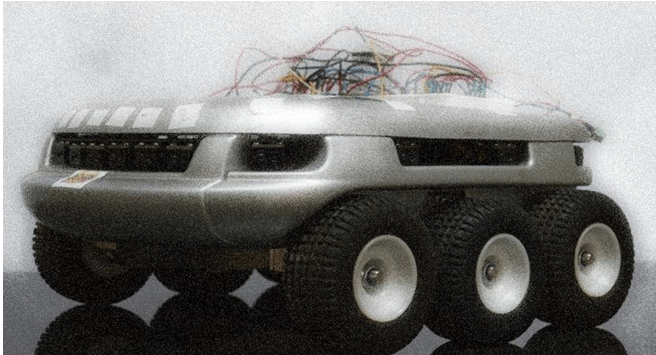
Рисунок 5.1 – Зовнішній вигляд мобільного робота Koala
Налаштування робота та його функціональність можна контролювати через інтерфейс RS232. Зв'язок між комп'ютером і роботом Koala проводиться за допомогою відправки та отримання ASCIІ повідомлень. Взаємодія дозволяє регулювати роботу у відповідності з командами. Взаємодія керуванням функціональними ресурсами робота використовує протокол команд і відповідей. Koala забезпечена процесором Motorola 68331@22 МГц. Головний процесор робота має пряме керування живленням двигуна і може зчитувати імпульсиенкодера. Він може також вивести інформацію про струм кожного двигуна, який пропорційний обертальному моменту коліс.
Кожне колесо робота приводиться в рух мікродвигуном постійного струму, що з’єднаний з колесом через передавальній механізм. Система керування двигунами постійного струму базується на використанні ПІД-регулятора, який закладено в програму головного процесора. Регулятор може працювати в якості регулятора швидкості і регулятора положення. Режим активації встановлюється згідно з типом заданого керування. Якщо регулятор отримує команду на регулювання положення, то система автоматично перемикається на даний вид керування.
У випадку роботи по швидкості регулятор в якості входу вибирає значення швидкості коліс і забезпечує її підтримку на необхідному рівні. Зміна швидкості відбувається достатньо швидко в будь-якому напрямку.
5.2 Веб-камера LogitechC310 HD
Ця камера використовувалась для проведення дослідів при керуванні роботом за допомогою світового потоку [6].

Рисунок 5.2 – Веб-камера LogitechC310 HD
Logitech C310 HD в досліді була використана з наступними характеристиками:
- роздільназдатність VGA 1280 X 720 пікселів;
- частота кадрів 30 кадрів за секунду.
Веб-камера такого типу підходить для відео високої чіткості з роздільною здатністю 720p і передачі даних 1 Мбіт/с.
6. Система візуального керування роботом
6.1 керування мобільним роботом Koala із середовища Simulink
Розроблений блок керування роботом Коала є незалежним і готовим об’єктом, що може використовуватись в усіх випадках керування мобільним роботом [7].
Програма блоку виконує наступні команди:
- вказівки компілятору;
- підключення допоміжних функцій;
- завдання локальних змінних;
- запам’ятовування поточного моменту часу;
- узгодження часу моделювання з реальним часом;
- відчинення послідовного командного порта;
- перевірка параметрів робота;
- перетворення даних в символьну форму;
- подача команди роботу;
- зчитування відповіді, значення реальних швидкостей ;
- перетворення даних в числову форму;
- закриття послідовного порта;
- розрахунок значень лінійних швидкостей та побудова графіка руху робота.
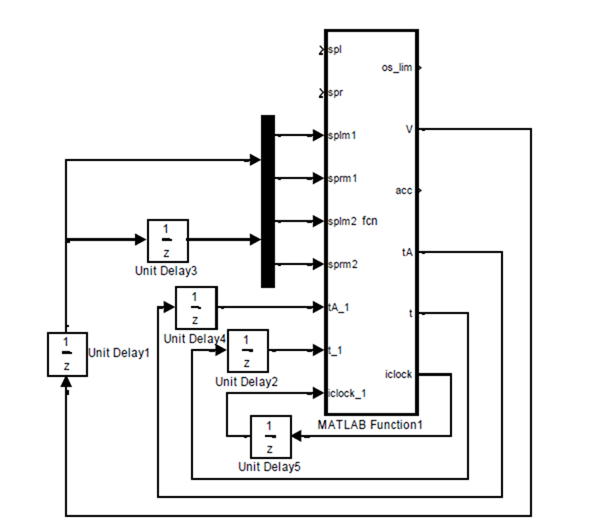
Рисунок 6.1 – Основний блок керування мобільним роботом із середовища Simulink
6.2 Автомобілі Брайтенберга
У 1984 році Валентино Брайтенберг (Valentino Braitenberg), відомий італійський невролог і кібернетик, професор інституту біологічної кібернетики ім. Макса Планка в Тюбінгені(Max Planck Institute for Biological Cybernetics), опублікував невелику книгу: Машини: експерименти з синтетичної психології
(V. Braitenberg Vehicles: Experiments in Synthetic Psychology
, A Bradford Book/The MIT Press, 1984). Брайтенберг, використовуючи свій принцип, що біологічне поведінка легше синтезувати, ніж аналізувати
, виготовив з елементарних механізмів та електричних пристроїв 14 варіантів синтетичних моделей (машинок), керованих найпростішими схемами, які імітували складну поведінку. Яскравим прикладом стали самохідні машини, які володіють здатністю фототропізму (прагнення до світла).
Автомобіль Брайтенберга є автомобілем з двома незалежними задніми ведучими колесами і двома відомими передніми [3]. Напрям руху робота визначається швидкістю обертання задніх і передніх коліс.
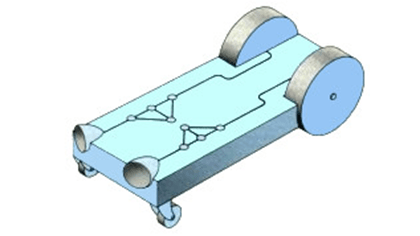
Рисунко 6.2 – модель автомобіля Брайтенберга
Колеса прикріплені до платформи у вигляді суцільного паралелепіпеда. До бічних граней цієї платформи можна прикріпити різні датчики. Електричні кола, що з'єднують давачі з задніми колесами, завершують конструкцію автомобіля. З’єднувальні провідники розташовуються на верхній грані платформи. Автомобіль стандартної моделі оснащений двома датчиками з широким кутом зору, що встановлені на передній частині. Кожен рецептор спрямований трохи вбік від повздовжньої осі; при такому розташуванні рецепторів світлове джерело, розташоване спереду і зліва від автомобіля, діє на лівий рецептор сильніше, ніж на правий. Рецептори електрично з'єднані з системою керування двигунами, що приводять у рух задні колеса. Сигнали, що передаються з'єднальними провідниками, це послідовності дискретних електричних імпульсів. Чим більше світла падає на даний рецептор, тим більше число імпульсів він посилає своєю вихідною лінією. При низьких рівнях освітлення передається лише кілька імпульсів на секунду. При високому рівні освітлення кількість імпульсів велика. Припустимо, що в обох випадках імпульси посилаються з рівними проміжками часу. На іншому кінці ліній послідовності імпульсів перетворюються на команди, що керують роботою двигунів. Чим більше імпульсів на секунду прибуває на дане колесо, тим швидше обертає його двигун. В загальному існує два варіанти з’єднання датчиків з колесами: пряме і перехрещене. При прямому датчики з’єднуються з колесами що знаходяться з того ж боку. При перехрещеному - датчик з’єднується з колесом на протилежному боці автомобіля. При потраплянні світла в їх поле зору, поведінка цих машин буде відрізнятись. В першому випадку якщо, наприклад, справа буде джерело світла, правий датчик отримає більше світла ніж лівий, то правий двигун почне обертатись швидше ніж лівий. Відповідно швидкість правих коліс стане більшою і робот почне повертати вліво до тих пір, поки джерело світла не зникне із поля зору.
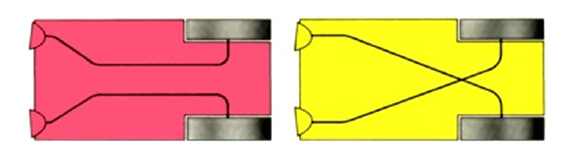
Рисунок 6.3 - Прямі (ліворуч) і перехрещені (праворуч) з'єднання.
В моделі з перехрещеним з’єднанням все навпаки. Модель бути не уникати світла, а їхати на нього.
7. Демонстраційний режим робота Коала
Робот Коала веде себе подібно автомобілям Брайтенберга. Є в роботі Коала демонстраційний режим на основі алгоритму Брайтенберга. Керувати роботом можна в середовищі Matlab і через ZOC Terminal [9]. Для цього існують команди, за допомогою яких здійснюється спілкування з роботом. Режим 0, в основі якого лежить алгоритм Брайтенберга, працює наступним чином: після запуску робот повинен їхати вперед, поки не з'являться перешкоди. Вони повинні бути яскравими, щоб краще сприймати відбите випромінювання давачами приближення.
Але конструкція робота набагато складніше автомобілів Брайтенберга, а саме, кількість інфрачервоних давачів приближення - 16.8 лівих датчиків з'єднані з лівим двигуном. 8 правил - з правим. Алгоритм Брайтенберга можна запрограмувати на мові С++ для платформи Ардуіно з микроконтроллером атмега 2560.
Висновки
На основі проведеної роботи планується:
- застосувати плату Arduino, щоб робот повністю став автономним і без проблем об’їзжав перешкоди (магістр Петровічева Ю. );
Рисунок – Оминання перешкоди роботом (анімація: 7 кадрів, 5 циклів повторення, 126 кілобайт)
- розробити алгоритм руху робота так, щоб той мав змогу виїхати з лабіринту в той момент, коли
побачив
світло.
При написанні даного реферату магістерська робота ще не завершена. Остаточне завершення буде у грудні 2014 року. Повний текст роботи та матеріали по темі можуть бути отримані у автора або його керівника після зазначеної дати.
Перелік посилань
- Астапкович А.М., Анисимов А.Л., Елисеенко А.Г., Суханов И.О. Современные тенденции построения систем управления дистанционно-пилотируемыми летательными аппаратами. // В кн.: Информационно-управляющие системы для подвижных объектов. СПб: Политехника, 2002. С. 7 32.
- Основы роботехники [Електронний ресурс]. – Режим доступу: http://www.gruppa-prolif.ru/content/view/76/98/.
- Braitenberg V. Vehicles. Experiments in Synthetic Psychology / Valentino Braitenberg. – The MIT Press, Cambridge, London, 1984. – 29 p.
- Практическая робототехника [Електронний ресурс]. – Режим доступу: http://www.roboclub.ru/index/ .
- Офіційний сайт Logitech [Електронний ресурс]. – Режим доступу: http://www.roboclub.ru/index/ .
- Офіційний сайт Unibrain [Електронний ресурс]. – Режим доступу: http:// www.unibrain.com .
- Time To Contact [Електронний ресурс]. – Режим доступу: http://opticflow.bu.edu/research/time-to-contact-estimation .
- Мельник А.А. Мобильные роботы компании «K-Team» для решения специфических технических задач / Мельник А.А., Борисенко В.Ф., Хоменко В.Н., Плис П.С.. – Кременчук, 2010 – С. 36 – 39. – (Вісник КДПУ ім. М. Остроградського, випуск 4/2010 (63). Частина 3)
- Commande d’un robot mobile rapide aroues non directionnelles sur sol naturel. These de doctorat presentee a l’universite Рaris 6: 10.04.2008 - 198с
- Москаленко В.В. Справочник электромонтера 2005, 2-е изд., 288 стр.
- Симонович С.В. Компьютер в вашей школе. – М.: Аст-Пресс: Ин-формком-Пресс. 2001. – 16 с.