
Системы частотно-регулируемого электропривода (ЭП) на базе трехфазных асинхронных двигателей (АД) со скалярным управлением имеют широкое распространение в приводах механизмов
требующих регулирование скорости в небольшом диапазоне (до 10:1) в сочетании с умеренными требованиями к качеству переходных процессов (например
большинство общепромышленных транспортных механизмов).
Настройка систем скалярного частотного управления, по сравнению с системами векторного управления с ориентацией по полю, достаточно проста, и в основном сводится к выбору закона частотного управления.
На практике часты случаи, когда приводные АД общепромышленных транспортных механизмов работают с частичной загрузкой [1], когда момент на валу АД не превышает 50% номинального значения. Как известно, энергетические показатели АД [коэффициент полезного действия , коэффициент мощности ] при этом существенно ниже номинальных (паспортных) значений.
При регулировании скорости АД с помощью алгоритмов скалярного частотного управления имеется возможность дополнительного повышения энергетических показателей за счет коррекции закона частотного управления. Одним из наиболее эффективных путей такой коррекции является организация дополнительного, параллельного контура регулирования [2] координаты, значение которой предполагается стабилизировать.
Этот дополнительный канал регулирования должен обеспечивать снижение амплитуды питающего напряжения, что при частичной загрузке АД, как показано в [1], приводит к повышению параметров .
является синтез и анализ различных способов выполнения параллельного контура регулирования (стабилизации), предназначенного для повышения энергетических показателей систем скалярного частотного управления АД и поддержания их на уровне, примерно соответствующем естественной характеристике АД. Потребляемая двигателем полная мощность определяется выражением:
Потребляемая двигателем полная мощность определяется выражением:
где , – действующие (эффективные) значения напряжения и тока фазы статора АД. Если известен текущий фазовый сдвиг ? между фазными напряжением и током (угол нагрузки), то, зная косинус этого угла (коэффициент мощности)
можно определить потребляемые активную и реактивную мощности:
Суммарные потери мощности в двигателе
составляются из электрических потерь в меди статора (?Рм1) и ротора (?Рм2), потерь в стали статора (?Рс1), механических (?Рмех) и добавочных (?Рдоб) потерь.
Полезная мощность на валу АД (выходная мощность) равна:
а эффективность электромеханического преобразования энергии характеризуется к.п.д.
Количественное определение механических потерь целесообразно выполнять в привязке к кинематической схеме приводимой в движение механической системы, что выходит за рамки настоящей статьи. Добавочные потери часто принимаются оценочно (до 1% суммарных потерь). Поэтому в данной статье ограничимся рассмотрением только электрических потерь в (2).
Как известно, при изменении нагрузки на валу АД энергетические показатели работы ЭП (? и ?) также изменяются. Это изменение имеет место вследствие зависимости угла нагрузки ? от частоты, что вызывает соответствующее изменение внутренних сопротивлений АД. Зависимость энергетических показателей ЭП в функции статического момента нагрузки МС и частоты питающего напряжения при частотном управлении АД в соответствии с пропорциональным законом ( ) проиллюстрирована на рис.1 для двигателя 4А-180-М4 (30 кВт).
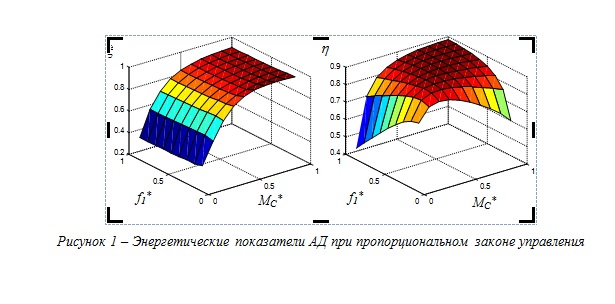
Из зависимостей рис.1 видно, что при частичной загрузке приводного двигателя есть ресурс для увеличения энергетических показателей двигателя. Например, в работе [Китман М. «Исследование энергетических характеристик асинхронных электроприводов при различных способах управления» Квалификационная работа на получение ОКУ «магистр» по специальности 8.05070203 «Электромеханические системы автоматизации и электропривод»] задача повышения энергетических показателей привода пассажирского эскалатора достигается за счет применения поискового алгоритма. Как было показано выше, загрузка приводного двигателя эскалатора в большой степени зависит от количества пассажиров, пребывающих на полотне в текущее время. Выше также было показано, что энергетические показатели привода при этом также снижаются. Для обеспечения режима оптимального энергопотребления привода эскалатора целесообразно снижать напряжение при частичной загрузке эскалатора. При этом базовое соотношение напряжение/частота подвергается изменению – амплитуда напряжения будет несколько меньше необходимой с точки зрения сохранения перегрузочной способности, в результате несколько снизится скорость двигателя, но энергетические показатели привода при этом будут оптимальными (максимальными).
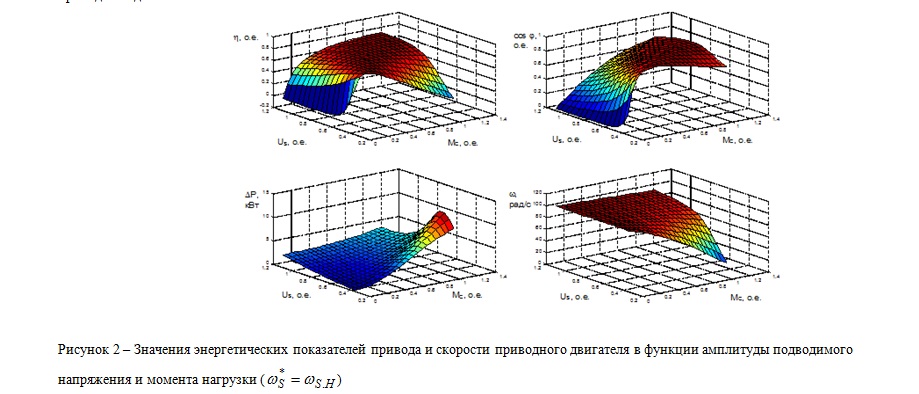
Для оценки эффективности снижения потер привода эскалатора были выполнены проверочные расчеты, результаты которых приведены на рис.2. С помощью приведенных зависимостей можно оценить возможный эффект от применения энергосберегающего управления. При номинальной загрузке привода энергетические показатели привода наилучшие – к.п.д. и коэффициент мощности привода максимальны. При снижении момента нагрузки Мс (при фиксированном Us=1) наблюдается снижение как к.п.д., так и коэффициента мощности, т.е. бо’льшую часть активной и реактивной мощности привод расходует неэффективно. Обратим внимание на то, что при частичной загрузке привода потери мощности снижаются, но это снижение не является пропорциональным снижению потребляемой активной мощности. Кроме того, имеет место повышение скорости, которое определяется жесткостью номинальной механической характеристики двигателя. Из зависимостей рис.2 также видны области оптимальных энергетических показателей привода. При конкретной загрузке привода (Мс=const<1) снижение амплитуды подводимого к двигателю напряжения приводит к перераспределению потоков энергии внутри двигателя, и к увеличению как к.п.д., так и коэффициента мощности привода. Потери мощности при этом также снижаются. Обратим внимание, что снижается также и жесткость механических характеристик, – это необходимо принимать во внимание при специфических режимах работы механизма. Зависимости иллюстрируют также, что при загрузках двигателя, близких к номинальной (полной), возможный эффект от энергосбережения практически отсутствует, т.е. задача повышения энергоэффективности работы привода актуальна при неполной загрузке приводного двигателя.
Таким образом, введение алгоритма для рассматриваемого привода позволит:
Идея – применить обратную связь, которая обеспечит автоматическое поддержание некторого энергетического показателя на заданном уровне.
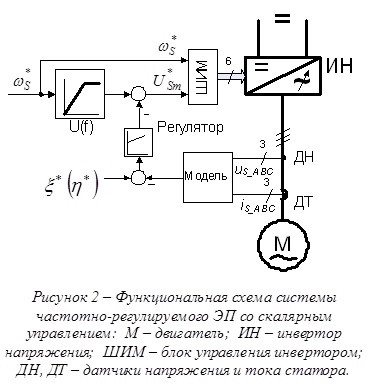
з полученных зависимостей можно оценить снижение энергетических показателей при частичной загрузке АД (при ), а также определить желаемые значения показателей, в качестве которых целесообразно принимать значения, близкие к номинальным. Обобщенная функциональная схема системы управления ЭП представлена на рис.2. Система предполагает параллельную коррекцию выбранного энергетического показателя (? или ?) – путем воздействия на амплитуду напряжения, прикладываемого к статору АД. Модель выполняет расчет необходимого параметра по (1) или (3), регулятор ПИ-типа в функции сигнала рассогласования формирует сигнал коррекции амплитуды напряжения статора. Настройка регулятора параллельного контура выполняется, исходя из желаемой динамики контура регулирования.
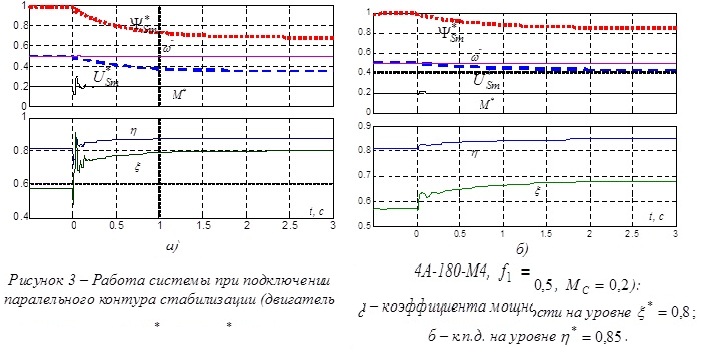
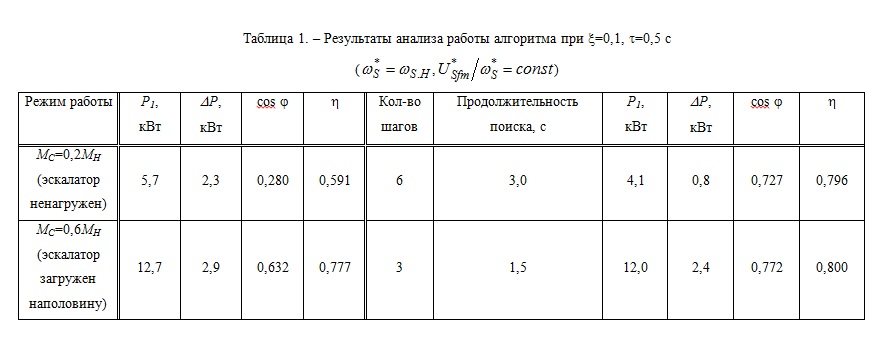
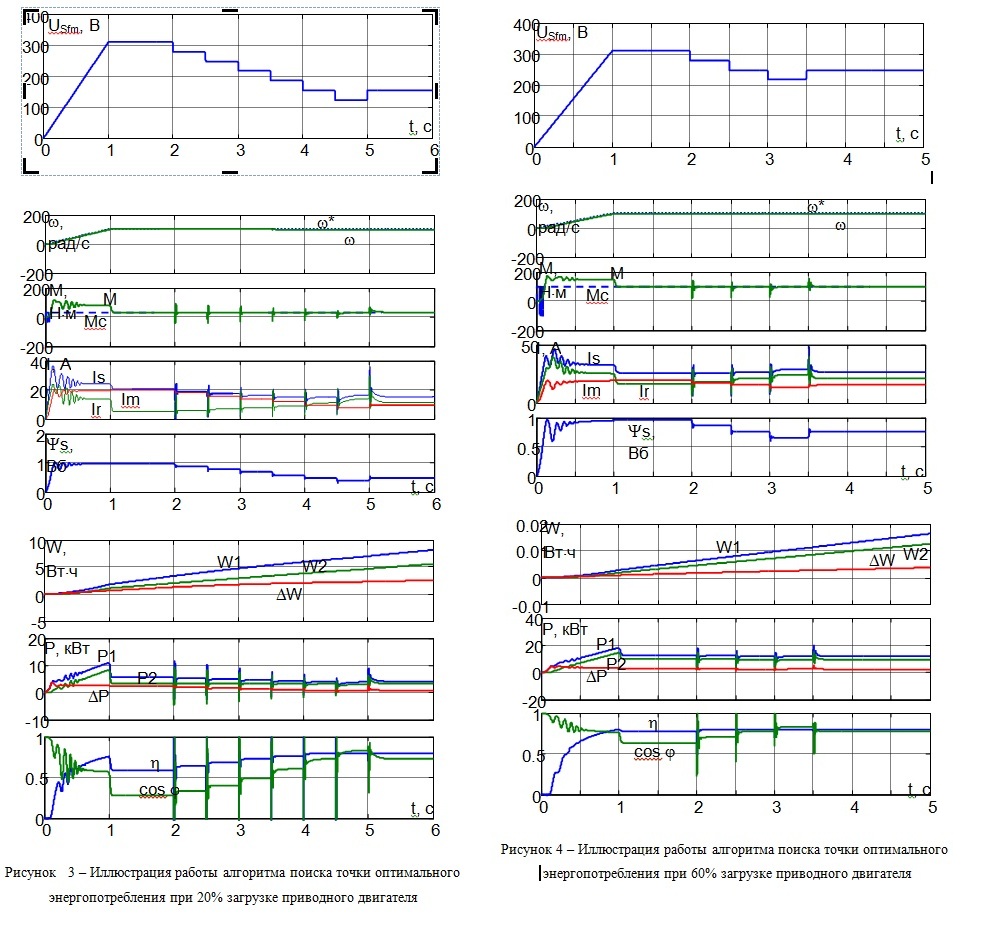
На рис. показаны результаты моделирования работы системы при заданной частоте , статическом моменте нагрузки . В каждом из рассмотренных случаев контур регулирования настроен таким образом, чтобы обеспечить достижение желаемого значения параметра за время, примерно составляющее 2 с. Представленные результаты свидетельствуют о возможности достижения поставленной цели при организации дополнительного контура стабилизации как коэффициента мощности, так и к.п.д. Первый вариант при этом является предпочтительней ввиду более выраженной монотонной зависимости ? от частоты f1 и момента нагрузки MC. Следует также отметить, что в других случаях дополнительный контур регулирования может быть организован для поддержания на требуемом уровне любой координаты (например, потребляемая реактивная мощность, модуль потокосцепления статора и др.).
Показано, что можно достичь улучшения энергетических показателей системы частотно-регулируемого ЭП со скалярным управлением за счет организации дополнительного параллельного контура стабилизации к.п.д. или коэффициента мощности на желаемом уровне. Очевидно, что это имеет преимущества перед применением поискового алгоритма.