БЕЗДАТЧИКОВЕ КЕРУВАННЯ СИНХРОННИМ ДВИГУНОМ З ПОСТІЙНИМИ МАГНІТАМИ НА ОСНОВІ АДАПТИВНОЇ СИСТЕМИ З ЕТАЛОННОЮ МОДЕЛЛЮ
Ізвеков В. О. студент; Божко В. В., доц., к.т.н. (Донецький національний технічний університет, м. Донецьк, Україна)
Основною особливістю електроприводу на основі синхронного двигуна з постійними магнітами є необхідність інформації про кутове положення ротора. Найбільш поширеним рішенням є установка датчика положення, який чутливий до електромагнітних перешкод і має певні обмеження по робочій температурі.
В свою чергу, усунення електромеханічного датчика положення ротора дозволить знизити вартість апаратної частини, спростити монтаж (відсутність додаткових кабелів), зменшити інерційність та підвищити робастність і надійність системи електроприводу [1].
Існує велика кількість методів оцінки кутового положення ротора. Загалом їх можна розділити на чотири групи: неадаптивні, адаптивні, інжекція сигналів і штучний інтелект. Неадаптивні методи засновані на оцінці напруги та струму, потокозчеплення, проти–ЕРС і не вимагають складних обчислень, але у великій мірі чутливі до зміни параметрів двигуна і недієздатні на низьких швидкостях. Штучний інтелект і інжекція сигналів є досить складними методами та вимагають тонкого налаштування і громіздких обчислень. Адаптивні методи являють собою перспективний напрямок , і можуть бути представлені як компроміс між якістю та складністю системи .
Адаптивні методи можна розділити на: оцінювач на основі адаптивної системи з еталонною моделлю (АСЕМ) і спостерігачі стану (повного і зниженого порядку, фільтр Калмана). До складу АСЕМ входять еталонна й адаптивна моделі, різниця між вихідними сигналами яких використовується для оцінки невідомого параметра. Причому тільки адаптивна модель повинна залежати від останнього. Сигнал помилки подається на механізм адаптації, який розраховує оціночну величину, яка використовується для настройки адаптивної моделі.
У разі застосування АСЄМ підходу для бездатчикового керування СДПМ еталонна модель може бути отримана на підставі рівнянь потокозчеплення статора в системі координат α-β [2]:
де – обчислені проекції потокозчеплення статора на осі α-β відповідно, – проекції напруги статора на осі α-β відповідно; – активний опір статора; – проекції струму статора на осі α-β відповідно; – початкове положення вектору потокозчеплення.
Для побудови адаптивної моделі можна використати рівняння потокозчеплення статора в системі координат α-β , отримані зі струмової моделі, куди входить кут повороту ротора, який є невідомим параметром:
де: – обчислені проекції потокозчеплення статора на осі α-β відповідно, що отримані зі струмової моделі; L – індуктивність фази статора; – магнітний потік постійних магнітів;θ – кут повороту ротора (електричний).
Механізм адаптації використовує помилку кута Δθ як коригувальну інформацію для обчислення регульованого параметру θ в адаптивній моделі:
де:– амплітудні значення обчисленого вектору потокозчеплення, які визначені на основі еталонної та адаптивної моделі відповідно.
Адаптація виконується за допомогою ПІ коректора [3]:
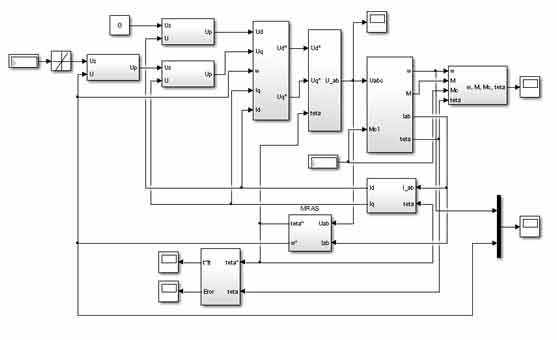
Для перевірки працездатності системи була розроблена математична модель у пакеті MATLAB/Simulink, яка приведена на рис. 1.
Рисунок 1 – Модель системи бездатчикового векторного керування СДПМ на основі АСЕМ
Моделювання виконувалось у наступних режимах: розгін до номінальної швидкості на холостому ходу, накид номінального навантаження, гальмування до нульової швидкості з номінальним моментом на валу.
Для моделювання використані наступні параметри двигуна:
Коефіцієнти ПІ коректора було визначено методом експериментальним шляхом.
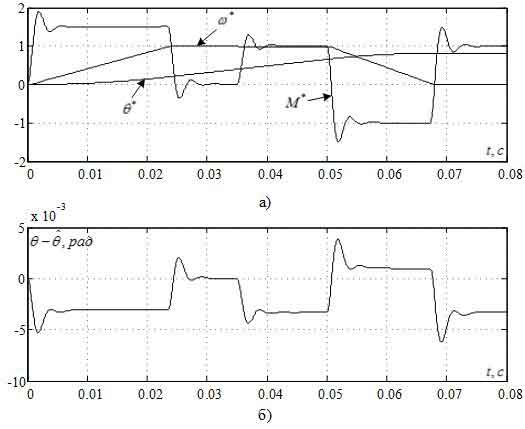
Перехідні процеси та помилка оцінювання приведені на рис. 2.
Рисунок 2 – Перехідні процеси в різних режимах роботи (а) та різниця між дійсним кутом та обчисленим (помилка оцінювання) (б)
З наведених перехідних процесів можна побачити, що розроблена система має характеристики аналогічні характеристикам системи з електромеханічним датчиком положення ротора (рис.2 а). З рис.2 (б) видно, що помилка оцінювання не перевищує 0.005 рад та зростає при збільшені моменту на валу.
Таким чином, АСЕМ дозволяє вирішити задачу оцінки кута повороту ротора в різних режимах роботи двигуна. Результати моделювання показали, що розроблена система дозволяє отримати діапазон регулювання швидкості до 1:50. Помилка оцінювання в даному випадку не перевищує 0.005 рад. Серед переваг такого підходу слід виділити простоту реалізації на мікропроцесорній техніці. Однак, недоліком є відсутність методики вибору коефіцієнтів коректора.
Перелік посилань
O. Benjak. Review of Position Estimation Methods for IPMSM Drives without a Position Sensor Part I: Nonadaptive Methods / O. Benjak, D. Gerling // XIX International Conference on Electrical Machines – 2010. – p. 1-6.
L. Vesely. Sensorless Control for Synchronous Motors // L. Vesely, P. Zbranek // International Conference on Autonomous and Intelligent Systems (AIS) –2010. –p. 1-5.
A. Mishara. MRAS Based Estimation of Speed in Sensorless PMSM Drive / A. Mishara, V. Mahajan, P. Agarwal // IEEE Fifth Power India Conference. – 2012 –p. 1- 5.
 – обчислені проекції потокозчеплення статора на осі α-β відповідно,
– обчислені проекції потокозчеплення статора на осі α-β відповідно,  – проекції напруги статора на осі α-β відповідно;
– проекції напруги статора на осі α-β відповідно;  – активний опір статора;
– активний опір статора;  – проекції струму статора на осі α-β відповідно;
– проекції струму статора на осі α-β відповідно;  – початкове положення вектору потокозчеплення.
– початкове положення вектору потокозчеплення.
 – обчислені проекції потокозчеплення статора на осі α-β відповідно, що отримані зі струмової моделі;
– обчислені проекції потокозчеплення статора на осі α-β відповідно, що отримані зі струмової моделі;  – магнітний потік постійних магнітів;
– магнітний потік постійних магнітів;
 – амплітудні значення обчисленого вектору потокозчеплення, які визначені на основі еталонної та адаптивної моделі відповідно.
– амплітудні значення обчисленого вектору потокозчеплення, які визначені на основі еталонної та адаптивної моделі відповідно.
 – коефіцієнт пропорціональної складної;
– коефіцієнт пропорціональної складної; – коефіцієнт інтегральної складної.
– коефіцієнт інтегральної складної.