ABSTRACT
Distributed energy resources (DERs) provide many benefits for the electricity users and utilities. However, the electricity distribution system traditionally was not designed to accommodate active power generation and storage at the distribution level. The microgrid provides an effective approach to integrating many small-scale distributed energy resources into the bulk electric grid. This paper presents an agent-based control framework for distributed energy resources microgrids. The features of agent technology are first discussed. An agent-based control framework for DER microgrids is then presented. To demonstrate the effectiveness of the proposed agent- based control framework, simulation studies have been performed on a dc distributed energy system that can be used in a microgrid as a modular power generation unit. Simulation results clearly indicate that the agent-based control framework is effective to coordinate the various distributed energy resources and manage the power and voltage profiles.
1. INTRODUCTION
The large-scale use of distributed energy resources (DERs) will change the way that electric energy is dispatched through the utility power grid, enabling the electricity consumers to have some degree of energy independence and the bulk power system to open to small distributed energy suppliers. The benefits of DERs are seen to be the reliability of service, the quality of power supply, and greater efficiency of energy use by utilizing the waste heat from power generation systems. In addition, DER systems can benefit electric utilities by reducing congestion on the grid, reducing the need for new generation and transmission capacity, and offering ancillary services such as voltage support and demand response. However, the electricity distribution system traditionally was not designed to accommodate active power generation and storage at the distribution level [1]. The technical issues involved in readily interconnecting and effectively integrating these DER applications with grid operations must be addressed to realize these benefits and avoid negative effects on reliability and safety.
The microgrid concept provides an effective approach to integrating small-scale distributed energy resources into the bulk electric grid [2]-[8]. An important aspect of microgrid is to find a suitable control strategy that will take advantage of the inherent scalability and robustness benefits of distributed energy. Distributed control, with decision-making done locally with each power source and load, can potentially create a scalable and robust energy system. By having the power sources and loads follow a common communication structure, adding power sources to meet the increasing load demand would be easier than the traditional way of incorporating new sources into a centralized control strategy. In this context, the agent technology is a suitable approach for autonomous control of distributed energy resource microgrids [9]-[14].
This paper presents an agent-based control framework for distributed energy resources microgrids. The main task is to outline an agent-based architecture and to define the functions of the agents according to the characteristics of the individual energy resources. In the following, the main features of the agent technology are first discussed in the context of microgrids. The agent-based control framework for the microgrids is then presented. To demonstrate the effectiveness of the proposed agent- based control method, simulation studies have been performed on a dc distributed energy system that can be used in a microgrid as a modular power unit. Simulation results clearly indicate that the agent-based control framework is effective to coordinate the various distributed energy resources and manage the power and voltage profiles.
2. Application of Agent Technology to Distributed Energy Resource Microgrids
The microgrid is definitely a distributed system with many small-scale energy resources dispersed somewhere in the energy network. As mentioned above, an approach to this completely distributed system is through the agent technology. The agent technology has been successfully applied to manufacturing, transportation, and many other fields [15]-[19], and the same concept can be applied to management of distributed energy systems. Although an increasing number of researchers have been discussing the issues related to different aspects of the agen technology since the last decade, there is still no stric definition about what an agent is. In the context of microgrids, an agent can be either a physical entity tha acts in the environment or a virtual one, i.e., with no physical existence. In this study, the physical entity is the agent that controls directly a distributed energy resource and a virtual one is a piece of software that makes bids to the energy market or stores data in a database. Generally speaking, agents have the following main characteristics.
Agents have a certain level of autonomy, which means that they can take decisions without a central controller or commander. To achieve this, they are driven by a set of tendencies. For example, a tendency for a battery system could be “to charge the batteries when the price for the kWh is low and the state of charge is low too”. Thus the multi-agent system decides when to start charging the battery based on its own rules and goals and not by an external command. In addition, the autonomy of every agent is related to the resources that it possesses and uses. These resources could be the available fuel for a diesel generator, the wind for a wind-turbine generator, or the sunlight for a photo-voltaic generator.
Agents are capable of acting in their environment, which means that they are able to perceive the changes in the environment in which they are immersed and then respond to those changes with their own actions whenever necessary. For instance, a microturbine generator, by altering its power production, can change the setpoints of the other local units, change the voltage level of the adjacent buses and from a more global point of view change the security level of the system [the stability of the system in case of a short circuit, for example].
Agents have proactive ability, which means that agents have their own goals and do not just act in response to changes that have occurred in their environments. They also initiate actions to try to achieve their goals. In multi- agent systems, an agent has certain behaviors and tends to satisfy certain objectives using its resources, skills and services. An example of these skills could be the ability to produce or store power and an example for the services could be the ability to sell power in a market. The way that the agent uses the resources, skills and services characterizes its behavior. As a consequence, it is obvious that the behavior of every agent is formed by its goals. An agent that controls a battery system whose goal is to supply uninterruptible power to a load will have different behaviors than a similar battery, whose primary goal is to maximize profits by bidding in the energy market.<
Agents have social ability, which means that agents can communicate with one another via agent communication language (ACL). This could be regarded as part of their capability for acting in the environment. As an example, let’s consider a system that includes a wind generator and a battery system: the battery system uses power from the wind generator to charge it or discharge it in case of no wind. In order to achieve this operation optimally, the two agents have to exchange many messages. This is a type of action because, by this communication, the environment is altered in a different way than if the two agents were acting without any kind of coordination. The case study shown later will demonstrate the communication between agents is helpful for making the distributed system work well or even optimizing the system. In addition, another significant feature of the agents is that they have partial or none at all representation of the environment. For example, in a power system the agent of a generator knows only the voltage level of its own bus and, maybe, it can estimate what is happening in certain specific buses. However, the agent does not know what is happening in the whole system. This is the core of the multi-agent system technology, since the goal is to control a very complicated system with minimum data exchange and minimum computational demands.
3. Agent-Based Control Framework
In the proposed agent framework, each energy resource and load in the microgrid is represented as an autonomous agent that provides a common communication interface for all the different components in the system. The control strategy for the represented energy resource or load is completely incorporated in the software port of the agent, so it is also called “control agent”. With each control agent running on a separate computer, the energy system is distributed.
The agent-based approach facilitates self-organization. Since each agent is independent, once it joins the system, the logic enables it to interface itself to the other existing agents. One common method for the interface is through a directory service whereby agents register themselves to a common directory and then self-organize their activities. The ability for agents to be self-organized contributes to the scalability and robustness of the microgrids. Since the system is self-organizing, there could be no limit to how many agents can join the microgrid at one time and no restrictions on when an agent should/can join. If an agent goes offline, the other agents are able to cope with the loss of that one agent and reorganize the system.
The proposed agent-based distributed energy resources microgrid is shown in Fig. 1. In the figure, the black lines represent the power transmission network. The common communication network is represented by the outer circle shown in the figure, which connects each agent in the system. To develop an agent-based control framework, it is necessary to define the detailed functions of each agent according to the characteristics of the individual energy resource. The following is a brief description of the elements in the agent architecture.
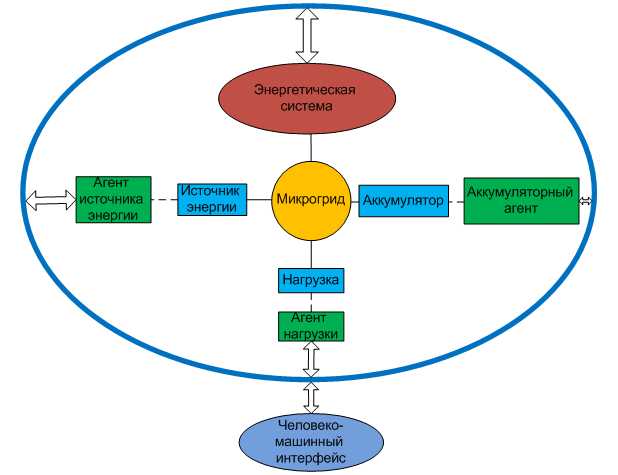
Fig. 1. Agent-based control framework for DER microgrid.
1. Energy source unit: The energy source unit provides electricity or heat to the microgrid. Examples of typical distributed energy sources are fuel cells, microturbines, photovoltaic cells, wind turbines, geothermal plants, and micro-hydro plants.
2. Energy storage unit: The energy storage unit stores energy when the energy supply within the microgrid is sufficient and supplies energy back to the microgrid when excess energy is demanded. Examples of energy storage units may include hydrogen storage systems (electrolyzer, hydrogen storage, and fuel cell systems), supercapacitors, batteries, flywheels, and superconductive magnetic energy storage (SMES) systems.
3. Load: The load on the microgrid represents the electricity or heat demand of a specified area.
4. Energy source agent: The energy source agent manages the represented energy source based on the local measured information and the communications with other agents. The agent will determine how much energy will be supplied and direct the corresponding energy source to do so. The control strategies for different types of energy sources may be different than each other, depending upon the characteristics of the fuels.
5. Energy storage agent: The energy storage agent manages the represented energy storage unit based on the local measured information and the communications with other energy source agents and load agents. The energy storage agent will determine how much energy will be stored or supplied at any time.
6. Load agent: The load agent is to manage the load to make it a controllable energy resource. In an agent-based microgrid, the load also participates in the competition.
7. HMI: The human machine interface (HMI) is for the operators to monitor and observe the status of the system.
The units shown above are a generic representation of an energy node system. An energy node can be viewed as a localized set of sources and loads that have a higher level of interaction.
An important design decision is how to choose a coordination strategy for each unit to coordinate among one another in order to satisfy the energy demand of the system and accomplish distributed control of the system. The coordination strategy defines the common communication framework for all interactions between the agents. Simple contract net coordination can be chosen in the initial phase of the study because it is one of the simplest coordination strategies [20]. All discussions between agents are started simply by a requesting agent asking the other agents for a proposed contract to supply some commodity, and then awarding contracts from the returned proposals in a fashion that minimizes cost or fulfils some other goal. The disadvantage of the contract net coordination is that there is only simple negotiation without allowing for counter proposals [20]. Effectively, the initiating agent has to pick from the presented contracts and cannot negotiate the price. An advantage of the contract net coordination is that it distributes computing, allowing the specific agent which started a contract net process to be responsible for evaluating bids and deciding based on its own rules which contracts to accept. It also separates internal agent information from one another, since agents only communicate through the defined contract net protocol and all calculations are done internally to each agent. Since the agents can change at every contract net cycle, there is no dependence on a specific agent. A system with more complex negotiation might lead to lower costs for the system; however, simple contract net is sufficient to demonstrate a distributed coordination framework.
4. Case Study: A DC DER Microgrid
To demonstrate the effectiveness of the proposed agent based control framework, simulation studies have been performed on a dc distributed energy system that can be used in a microgrid as a modular power generation unit. In this case study, the time delay in the communication network is ignored since the objective here is to verify the feasibility of the agent-based control platform for DER microgrids. In the future work, a hardware platform will be built and the communication delay will be considered.
The distributed energy system comprises a PV panel, a PEM fuel cell stack, and a lithium-ion battery, which are connected to a DC voltage bus through appropriate dc-dc power converters, as illustrated in Fig 2. There are two main sources of energy: PV panel and fuel cell stack. Each energy source is represented by a control agent, which is used to coordinate the power converter. The currents and voltages of the PV panel and fuel cell stack are measured, filtered appropriately, and then fed into the local control agents. The power conditioning system (including power converters and the associated control agents) controls the power flowing from each source of energy, and allocates the available power to recharge the battery if possible. Although the battery is an energy storage device, it is also a source of energy when the load demands excess energy. In the microgrid, the PV panel provides as much power as possible to the load. The function of the fuel cell is to supply to the load the rest of the average power that the PV panel can not meet. The battery supplies transient power to peak load demands or absorbs transient power from the other sources.
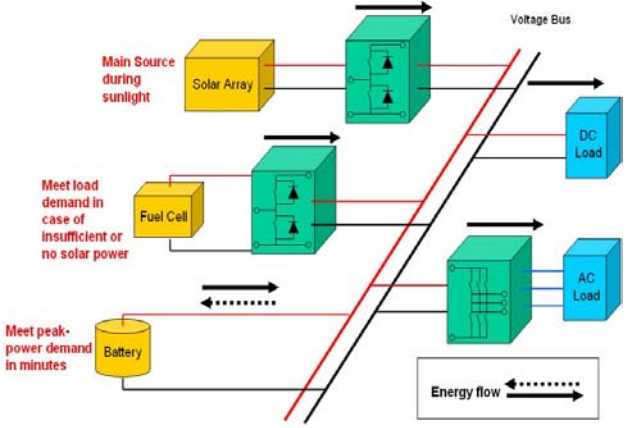
Fig. 2. Structure of the distributed energy system under study.
The PV panel powers the load and charges the battery through a buck converter which acts as a maximum power point tracker. The buck converter is driven by a PWM generator and is controlled by a digital controller. A boost converter is selected to adapt the low DC voltage output from the fuel cell stack to the regulated bus voltage. The battery is directly connected to the voltage bus. The charging current is regulated by controlling the bus voltage. This is achieved eventually by regulating the PV source and the fuel cell source.
4. CONCLUSION
This paper presents an agent-based control framework for distributed energy resources microgrids. The features of agent technology are first discussed. The agent-based control framework is then presented. To demonstrate the effectiveness of the proposed agent-based control framework, simulation studies have been performed on a dc distributed energy system that can be used in a microgrid as a modular power generation unit. Simulation studies demonstrate that the control agents manage the power of each energy source properly and the microgrid works reliably. Simulation results show that the proposed agent-based control framework is effective for the distributed energy resources microgrids.
5. REFERENCES
1. T. S. Basso, and R. DeBlasio, “IEEE 1547 series of
standards: interconnection issues”, IEEE Transactions on
Power Electronics, Vol. 19, No. 5, pp. 1159 – 1162, Sept.
2004.
2. R. Lasseter, “MicroGrids”, Proceedings of 2002 IEEE
Power Engineering Society Winter Meeting, Vol. 1, pp.
305 – 308, Jan. 2002.
3. R. Lasseter, and P. Paigi, “Microgrid: a conceptual
solution”, Proceeding of IEEE 35th Annual Power
Electronics Specialists Conference, Vol. 6, pp. 4285 –
4290, June 2004.