Аннотация
Ю.М. Иньков, В.П. Феоктистов, Я.А. Бредихина Плавное импульсное регулирование возбуждения электродвигателей постоянного тока Рассмотрен электропривод с мощным электродвигателем постоянного тока последовательного возбуждения, плавное регулирование которого в зоне регулирования возбуждения реализовано при помощи широтно-импульсного преобразователя, подключенного параллельно обмотке возбуждения. При этом обосно¬ван универсальный метод расчета регулировочных и пульсационных характеристик электропривода в зоне ослабления возбуждения. Эти характеристики в качестве примера приведены для тягового электродвигателя мощностью 250 кВт
АКТУАЛЬНОСТЬ РАБОТЫ
Электродвигатели постоянного тока последовательного возбуждения широко используют в качестве тяговых на электрическом транспорте, а также в некоторых общепромышленных электроприводах, в которых воз¬можны перегрузки по вращающему моменту. Для таких двигателей после выхода на естественную характеристику полного поля характерно макси-мально возможное использование зоны регулирования возбуждения, когда отношение токов обмоток возбуждения Iv и якорной Iya (коэффициент регулирования возбуждения)

У современных электродвигателей, например, у тяговых двигателей типа 1ДТ003 электропоездов пригородного сообщения, используют βmin = 0,19. У электродвигателей других видов электропод- вижного состава имеем βmin = 0,3 + 0,5 . Недостаток применяемых систем регулирования возбуждения состоит в том, что обычно используют ступенчатое изменение β, подключая параллельно обмотке возбуждения резисторы и индуктивный шунт [1]. С точки зрения автоматизации электро¬приводов, желательно плавное регулирование β.
МАТЕРИАЛ И РЕЗУЛЬТАТЫ ИССЛЕДОВАНИЙ.
Известно несколько таких систем с импульсными преобразователями (ИП); на рис. 1,а,б показана одна из них соответственно для двигательного режима и для режима реостатного торможения (ва¬гоны метро, электровозы типов ЧС2Т, ЧС7).
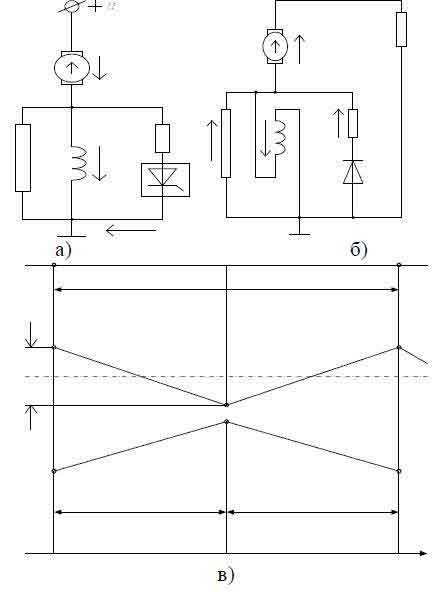
Рисунок 1 - Схема регулирования возбуждения с импульсным преобразователем а) и для режима реостатного торможения б); в) - упрощенная диаграмма, характеризующая электромагнитные процессы импульсного регулирования
На рис. 1,в приведена упрощенная диаграмма, характеризующая электромагнитные процессы импульсного регулирования в таких системах при следующих допущениях:
- ток Iya якорной обмотки постоянен и непульсирует, поскольку пульсации тока Iv, недолжны превышать 5-7 %, а магнитный поток двигателя дополнительно сглажен вихревыми токами в остове двигателя;
- изменения тока в обмотке возбуждения, а также в шунтирующих её цепях rsh и R-ИП счита¬ем линейными в функции времени t для каждого из характерных интервалов периода Т импульсного цикла ИП (ИП включен и ИП выключен).
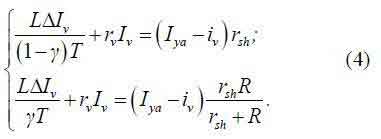
Обычно принимают rsh =(8 -10)rv, а сопротивление rv в принципе может быть равно нулю, но, с точки зрения смягчения аварийных процессов, а также для улучшения регулировочных и пульсационных характеристик желательно иметь R = βminrv. При расчете квазистационарного электромагнитного процесса исходными являются дифференциальные уравнения, соответственно, для интервалов “ИП выключен” и “ИП включен”:

где дробь в правой части второго уравнения - это подключенное параллельно обмотке возбуждения эквивалентное активное сопротивление, соответствующее параллельному соединению rsh и R (привключенном ИП).
Используя ранее сформулированное допущение о линейности изменения iv в каждом характерном интервале импульсного цикла ИП, можно заменить входящие в соотношение (2) производные от тока возбуждения их линейными конечными приращениями


где φ- коэффициент заполнения импульсного цикла.
Подставив (3,а) в (2,а), а (3,б) в (2,б) и заменив мгновенное значение тока iv его средним за период Т значением Iv, получим систему линейных алгебраических уравнений с двумя неизвестными (ΔIv и Iv):
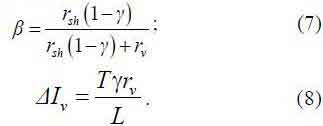
При решении уравнений (3) целесообразно перейти к неизвестной β=iv/iyaт.е. к коэффициенту регулирования возбуждения, что окончательно дает

Выражение (5) является регулировочной ха-рактеристикой β(φ), а выражение (6) - безразмер¬ной пульсационной характеристикой ΔIv)(φ). Если в схеме (рис. 1,а) положить R=0, то получим аналогичные выражения:
Характеристики в форме аналитических выражений (5-8) представлены на рис. 2 для rsh=8rv и для R=0, R=0.2rv

Рисунок 2 - Регулировачные характеристики β(φ)
Видно, что с введением R регулировочная характеристика сглаживается, а пульсации снижаются. Кроме того, в режиме работы электропривода с βmin можно полностью выключить ИП, т.е. перейти в беспульсационный режим регулирования возбуждения. Восстановить импульсное регулирование следует при увеличении β или при резком повышении питающего напряжения.
ВЫВОДЫ
Сопоставление с результатами ис¬пытаний показывает, что для тяговых электродви¬гателей мощностью 100-250 кВт при βmin = 0,2 и для тяговых электродвигателей мощностью 600-850 кВт при βmin = 0,46 расхождение расчетных и опытных данных по регулировочным и пульсационным характеристикам не превышает 8 % от но-минального значения тока якорной обмотки Iya.Это свидетельствует о приемлемости предложенного расчетного метода.
Список использованной литературы
1. Жуликов В.Н., Иньков Ю.М., Козлов Л.Г. и др.; под ред. Ю.М. Инькова и Ю.И. Фельдмана. Электроподвижной состав с электрическим тор¬можением. - М.: ГОУ “Учебно-методический центр по образованию на железнодорожном транспорте”, 2008. - 412 с.