Аннотація
И.С. Конох, А.И. Ломонос Управляющее программное обеспечение лабораторного стенда для исследования электропривода постоянного тока с электромашинным усилителем
Проанализирована актуальность создания электромеханического лабораторного оборудования с компьютеризированным управлением. Разработано управляющее программное обеспечение высокого уровня в среде LabView 8.5 для исследования режимов работы электропривода по системе электромашинный усилитель–двигатель постоянного тока. С помощью программных средств реализованы функции замкнутого управления и анализа качества переходных процессов.
АКТУАЛЬНІСТЬ РОБОТИ.
Розвиток комп’ютеризованих засобів і програмного інструментального забезпечення дає можливість реалізації учбового стендового обладнання, що має низьку вартість і забезпечує функції аналізу миттєвих процесів.
Для вивчення практичних аспектів реалізації сис-тем керування електроприводом і дослідження режи-мів їх роботи існує актуальна потреба у побудові ла-бораторних комплексів із замкненими системами регулювання, розвиненою візуалізацією і функціями оцінювання якості процесів керування [1]. Програмна частина таких комплексів може бути використана як для реального обладнання, так і для побудови віртуа-льних засобів навчання, в яких графічний інтерфейс і функції ідентичні, а всі електромеханічні пристрої замінено на імітаційні моделі [1, 2].
МАТЕРІАЛ І РЕЗУЛЬТАТИ ДОСЛІДЖЕНЬ
Комп’ютеризовані стенди кафедри САУЕ забезпечують практичне вивчення питань побудови та оптимізації мікропроцесорних систем регулювання фазових змінних у системах електроприводу студентами з напрямів «Електромеханіка» і «Системна інженерія».
Лабораторний стенд (рис. 1), який використано у роботі, складається з наступних основних елементів [1]: електричні двигуни постійного струму незалеж-ного збудження М1, M2 (Р=120 Вт); електромашин-ний підсилювач (Р=1,2 кВт); асинхронний двигун АД (Р=1,9 кВт); транзисторні перетворювачі (ТП1–ТП5); сенсори напруги, струму й частоти обертання (ДН, ДС, Tg); модуль збору й обробки інфо-рмації m-DAQ з функцією зв’язку з електронно-обчислювальною машиною (ЕОМ) з послідовним інтерфейсом.
Основними задачами застосування стенду є:
- дослідження режимів роботи електроприводу за системою ЕМП–ДПС;
- реалізація статичного й динамічного наванта-ження випробуваного двигуна М1;
- дослідження енергетичних процесів у системі ЕМП–ДПС.
Основною складовою стенду є електропривод за системою ЕМП–ДПС. Для управління вихідною напругою ЕМП його керуючі обмотки ОК1–ОК3 підключаються до регульованих джерел напруги (ТП1–ТП3). Навантаження на валу М1 забезпечує аналогічний двигун М2, ввімкнений у генераторно-му режимі. Напруга збудження основного та наван-тажувального двигунів змінюється за допомогою транзисторних регуляторів напруги (ТП4, ТП5). У кожному із силових кіл електричних машин встано-влено датчики напруги і струму, частота обертання контролюється тахогенератором.
Подібні системи використовуються в електро-приводах екскаваторів, для яких характерною є ная-вність двоконтурного регулятору. Зовнішній контур складає регулятор швидкості, в якому переважає пропорційна складова. Внутрішній контур забезпе-чує регулювання й обмеження струму згідно ПІ-закону. Також стенд дозволяє без додаткових апаратних затрат реалізувати роботу одноконтурних систем регулювання швидкості з впливом або на обмотку керування ЕМП, або на обмотку збудження М1.
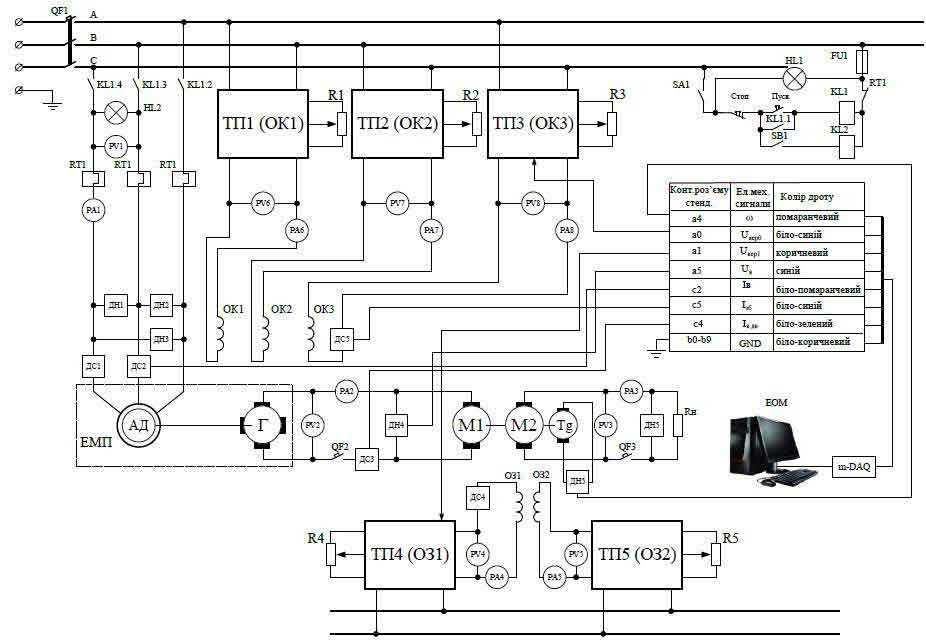
Рисунок 1 – Блок-схема лабораторного стенду
На рис. 2 показано можливості, що надає розроблене програмне забезпечення для вивчення принципів керування електроприводами постійного струму. Інтерфейс користувача, розроблений у середовищі LabView 8.5 [2], реалізує повний набір функцій керування й візуалізації. На лицьовій панелі інтерфейсу (рис. 3) представлені компоненти вибору режиму роботи та кількості контурів регулювання.У програмі є можливість контролювати миттєві та дійсні значення електричних величин, таких, як напруга, струм, потужність для всіх електричних кіл, а також частоту обертання двигунів М1, М2. У режимі ручного керування можна напряму здійснювати зміну напруги збудження М1 та напруги керування ЕМП. Управління коефіцієнтами ПІД-регулятора й обчислення значень критеріїв якості здійснюється на вкладниці, що приведена на рис. 4.

Рисунок 2 – Структура інтерфейсу користувача
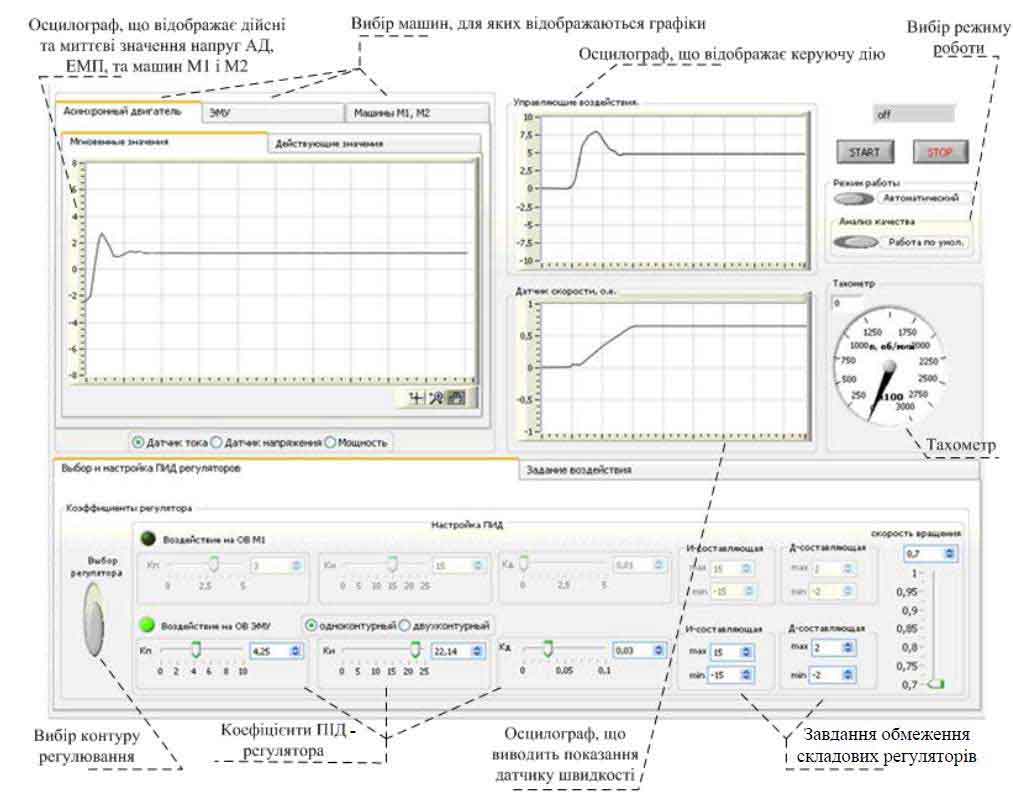
Рисунок 3 – Інтерфейс користувача демонстраційного стенду
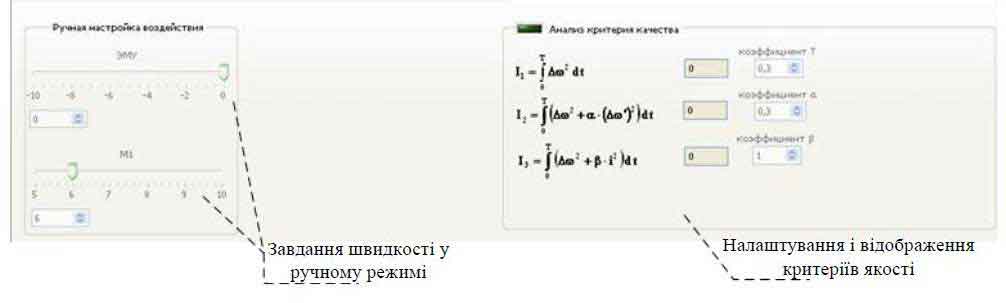
Рисунок 4 – Вікно завдання керуючих впливів і обчислення критеріїв якості
У проекті існує можливість впливу на обмотку збудження ДПС та на обмотку збудження ЕМП. Регулятор виконаний у вигляді бібліотечного модулю, який можливо використовувати для інших систем [2] (рис. 5).
Як інтерфейсний пристрій між розробленим програмним додатком, що виконується на персональному комп’ютері, і стендовим обладнанням використовується USB-модуль збору й обробки інформації m-DAQ фірми Holit Data Systems. Системна інтеграція USB-пристрою виконується за допомогою підключення програмних драйверів від виробника до проекту LabView 8.5. Частину блок-схеми, де відбувається налаштування параметрів роботи модуля m-DAQ, приведено на рис. 5.
Параметри даного програмного забезпечення: кі-лькість активних каналів – 3, частота дискретизації – 20 кГц/канал, розмір блоку даних – 4096 байт.
Під час вибору автоматичного режиму роботи активується вкладка завдання коефіцієнтів, де вми-кається блок налаштування коефіцієнтів ПІД–регулятору швидкості для двигунів постійного струму та обмеження за інтегральною та диферен-ційною складовими.
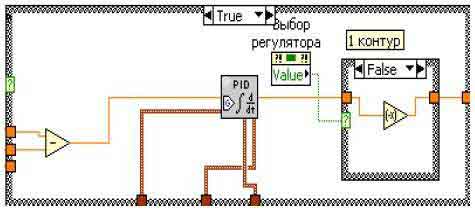
Рисунок 5 – Реалізація одноконтурної системи керування швидкістю з ПІД-регулятором
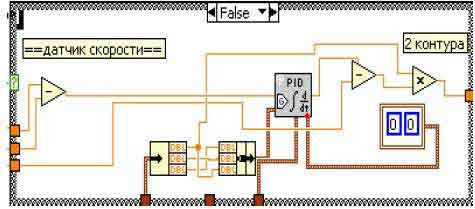
Рисунок 6 – Реалізація двоконтурної системи керування
Також можливо обрати підпорядковану структуру регулятору швидкості із внутрішнім контуром струму (рис. 6) і впливом на одну з обмоток керування ЕМП.
ВИСНОВКИ
Розроблене програмне забезпечен-ня дозволяє дослідити процеси автоматичного керу-вання швидкістю в електроприводі за системою ЕМП–ДПС на реальному обладнанні за допомогою програмних засобів пакету LabView 8.5 і бюджетно-го модулю збору й обробки інформації m-DAQ. Реа-лізовано можливість досліджувати роботу однокон-турних та підпорядкованих регуляторів, режими навантаження приводу постійного струму, процеси стабілізації швидкості, енергетичні процеси, прово-дити оптимізацію керуючих алгоритмів.
Розроблені окремі програмні модулі можливо використовувати для стендового обладнання, що є лабораторною базою для навчальних курсів, пов’язаних з вивченням питань автоматизованого електроприводу і систем керування електроприво-дом.
ЛІТЕРАТУРА
1. Бялобржеский А.В., Ломонос А.И., Гордиенко М.Г. и др.. Исследовательские компью-теризированные лабораторные комплексы // Вісник НТУ „ХПІ”. Збірник наукових праць. – Темат. вип.. «Проблеми автоматизованого електроприводу. Теорія і практика». – 2003. – № 10. – Т. 2. – С. 292–297.
2.Конох І.С., Найда В.В., Гула І.С. Комп’ютеризований лабораторний комплекс для дослідження інтелектуальних цифрових систем керування електроприводом // Вісник Кременчуцького державного політехнічного університету ім. М. Остроградського. – 2008. – Вип. 4/2008 (51). – Ч. 1. – С. 17–21.