Аннотация
Передерій О.В. Імітація навантаження електроприводу поздовжньо-стругального верстату Представлено метод та результати експерименту з апаратної імітації механічного навантаження електроприводу механізму переміщення столу поздовжньо-стругального верстату, та проведені експериментальні випробування, що відповідають технологічній тахограмі функціонування устаткування. Застосовано електромашинний навантажувальний агрегат з процесорним керуванням.
Вступ.
Більша частина вироблюваної в усьому світі електричної енергії перетворюється за допомогою електродвигунів у механічну, що у свою чергу потребує створення оптимальних систем керування. Тому у сучасному світі спостерігається стрімкий розвиток різноманітних методів побудови електроприводу. Відповідно постає питання якісної перевірки таких систем за най коротший час. Але не завжди зручно та вигідно, а деколи й не можливо, провести тестування проектуємої системи керування на реальному технологічному об’єкті. У цьому випадку рішення полягає у застосуванні різного роду імітаторів електроприводу промислового устаткування, які відтворюють і використовують різні чинники у моделі, тим самим спрощуючи умови тестування. Імітація це метод дослідження явищ і процесів, що ґрунтується на заміні оригіналу об’єкта досліджень іншим, подібним до нього тобто його моделлю.
Аналіз попередніх досліджень.
Імітація процесів широко застосовується у таких галузях промисловості як автомобільна, робото-будування, водно-морська, аерокосмічна та електронна, також у електропостачанні у розробках вітрогенераторів. При цьому тестуються розроблені програми керування системою на наявність помилок. Це дозволяє визначити якісні показники роботи розроблюваних регуляторів [1, 2]. У сучасному процесу проектування метод імітації є одним із шагів процедури тестування нових систем [3, 4].
У разі створення математичної моделі її відповідність до об’єкту також може визначатися з застосуванням елементів імітації [5]. При ідеальному випадку процесу імітації для випробуваного обладнання об’єкт, що імітується, нічим не відрізняється від реального.
У наш час комерційно випускаються платформи для реалізації імітації такими фірмами як Opal-RT, dSPACE, RTDS, Autobox, Mathwork xPC. Ці системи програмуються безпосередньо на мові програмування С або у програмному пакеті Matlab/Simulink та дозволяють подальшу компіляцію до мови С. Завдяки вбудованій функції контролю часу циклу моделювання гарантовано досягається імітація у режимі реального часу. Інший варіант реалізації системи імітації включає застосування програмної оболонки LabView, що потребує значно менших фінансових затрат та є більш доступним, але в цьому разі не має механізму гарантування відповідності до режиму реального часу [6].
Метa досліджень
Метою досліджень є реалізація системи імітації навантаження електроприводу механізму переміщення столу поздовжньо-стругального верстату та проведення експериментальних випробувань, що відповідають технологічній тахограмі функціонування устаткування.
Матеріал і результати дослідження.
У даній публікації представлено метод та результати експерименту з імітації механічного навантаження електроприводу механізму переміщення столу поздовжньо-стругального верстату. На рис. 1, 2 зображено тахограму та навантажувальну діаграму електродвигуна приводу для одного технологічного циклу роботи верстата [7, 8]. На рис. 1 як W1 позначена понижена пряма кутова швидкість двигуна, W2 – повна пряма кутова швидкість, W3 – зворотна кутова швидкість. На рис. 2 М1, М2, …М11,М12 – моменти навантаження двигуна на відповідних етапах роботи верстата. Ці дані є вхідними до побудови моделі навантаження у програмному пакеті Matlab/Simulink.
Дослідження проведено на експериментальному стенді електроприводу, який є електромашинним навантажувальним агрегатом з процесорним керуванням, функціональна схема якого представлена на рис. 3.
До складу системи входить перетворювач частоти, який працює у режимі U/f=const та параметрується за допомогою програмного пакету DriveMonitor. До перетворювача підключено асинхронний електродвигун. Випрямляч напруги застосовано для регулювання моменту двигуна постійного струму з постійними магнітами. Вали двигунів жорстко з’єднано за допомогою муфти, тож утворювальний момент є навантажувальнім моментом для асинхронного електродвигуна. Для здійснення функції керування частотою обертання асинхронного двигуна, формування завдання на момент двигуна постійного струму та обробки заміряних значень швидкості та струму застосовано мікропроцесорний контролер DS1104 фірми "dSpace". Контролер отримує інформацію від пристроїв вимірювань щодо миттєвих значень швидкості та струмів. В установці застосовано сучасні датчики струму, що функціонують за принципом ефекту Холла. Для вимірювання швидкості обертання валу застосовано тахогенератор. Вихідні сигнали всіх датчиків формуються у вигляді напруги. Відображення процесів та архівація даних контролера здійснюється за допомогою програмного пакету візуалізації й управління ControlDesk.
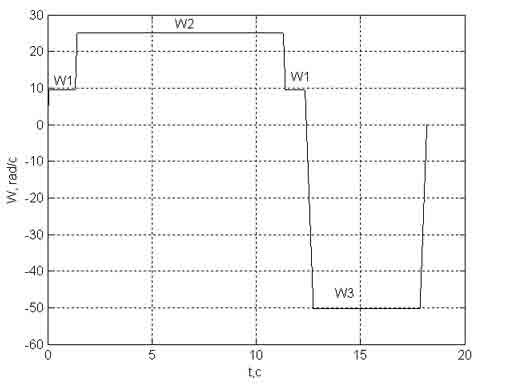
Рисунок 1 – Тахограма електродвигуна приводу механізму переміщення столу поздовжньо-стругального верстату
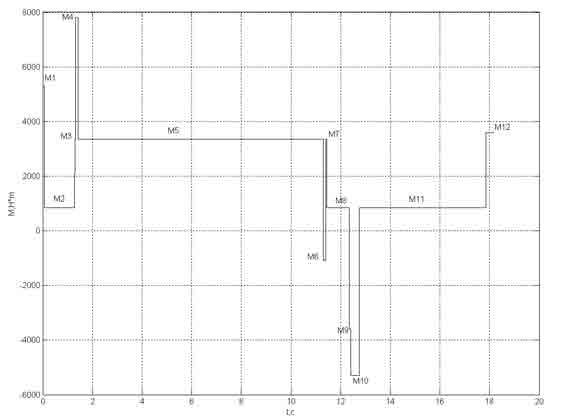
Рисунок 2 – Навантажувальна діаграма електродвигуна приводу механізму переміщення столу поздовжньо-стругального верстату
У програмному пакеті Matlab/Simulink створюється модель, яка відповідно до технологічного процесу роботи поздовжньо-стругального верстату формує завдання на частоту обертання електроприводу механізму переміщення столу та момент навантаження створюваний двигуном постійного струму. На рис. 4 представлено структурна схема моделі імітатора навантаження електроприводу механізму переміщення столу поздовжньо-стругального верстату та її зв'язок з блоками цифро-аналоговими та аналого-цифровими перетворювачів.
У ході проведення експериментальних випробувань, було реалізовано роботу асинхронного двигуна відповідно технологічній тахограмі функціонування приводу механізму переміщення столу. Отримані експериментальні результати перебігу частоти обертання валу та моменту навантаження двигуна отримані у програмному пакеті візуалізації й управління ControlDesk представлені на рис. 5 цілком відображають технологічну тахограму функціонування електроприводу механізму переміщення столу поздовжньо-стругального верстату. Слід зауважити, що задіяний випрямляч не дозволяє змінювати знак моменту навантаження тому у якості завдань прийнято модулі величин.
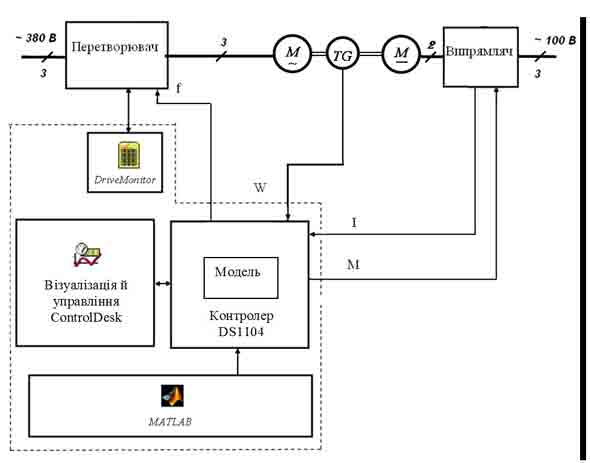
Рисунок 3 – Функціональна схема експериментального стенду імітатора навантаження
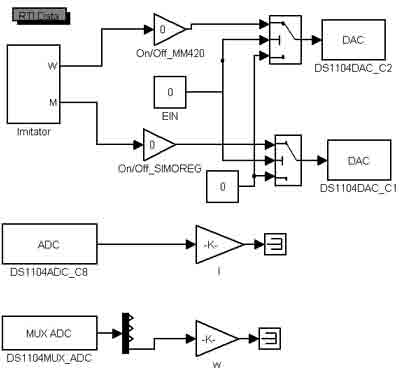
Рисунок 4 – Структурна схема моделі імітатора навантаження електроприводу механізму переміщення столу поздовжньо-стругального верстату
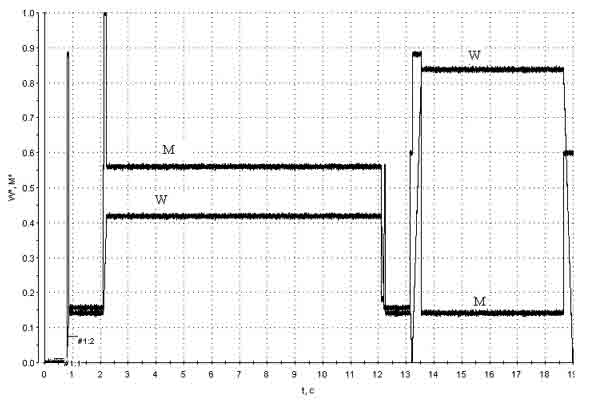
Рисунок 5 – Перебіг частоти обертання валу та моменту навантаження двигуна приводу механізму переміщення столу
Висновки.
Представлено експериментальній стенд імітації навантаження електроприводу, що відтворює властивості навантаження електроприводу механізму переміщення столу поздовжньо-стругального верстату. Створено модель що відповідає технологічній тахограмі функціонування устаткування. У результаті експериментальних досліджень системи навантажувальної установки отримано позитивні результати.
Таким чином показана можливість використання імітатору навантаження електроприводу замість реального устаткування у разі проектування та проведення випробувань систем керування.
Список использованной литературы
1. Комп'ютеризований лабораторний комплекс для вивчення цифрових систем керування з функцією імітації технологічного навантаження / Калінов А.П., Прітченко О.В., Мамчур Д.Г., Мельников В.О. // ПРОБЛЕМИ ВИЩОЇ ШКОЛИ. – 2009. - Вип. 3(56). – Ч. 1. – С. 8-13.
2. B. Lu, X. Wu, H. Figueroa, A. Monti, "A low cost real-time hardwarein- the-loop testing approach of power electronics control", IEEE trans. on Industrial Electronics, vol. 52, no. 3, April 2007, pp. 919-931.
3. H. Hanselmann, "Hardware-in-the-loop simulation testing and its integration into a CACSD toolset", IEEE-CCS'96, Dearborn, Sept. 1996.
4. D. Maclay, "Simulation gets into the loop", IEE Review, May 1997, pp. 109-112.
5. Jing Feng Hu Zhong Guoqiang Ao Junxi Wang Hangbo Tang Xiaojian Mao Bin Zhuo Principles and application of the real-time hardware-in-the-loop simulation platform based on multi-thread and CAN published 07.2008; on Proc. of IEEE ISIE 2008, Cambridge, UK; Page(s): 2225 – 2230.
6. Hu. Zhong Ao, G., Qiang, J., Yang, L., and Bin, Z., "Development of a real-time hardware-in-loop simulation test bench for hybrid electric vehicle based on multit-hread technologies,", IEEE International Conference on Vehicular Electronics and Safety, 2006. pp. 470-476, Shanghai China, 2006
7. Типовые задания к курсовому проекту по основам электропривода / Томашевский Н.И., Шрейнер Р.Т. и др. - Свердловск: СИПИ, 1989. - 48 с.
8. Справочные данные по элементам электропривода: Методические указания к курсовому проекту по дисциплине "Теория электропривода" / И.Я. Браславский А.М. Зюзев и др. - Екатеринбург: УГТУ, 1995. - 56с.