Аннотация
Рыков Г.Ю., Гладырь А.И. Лабораторный комплекс для исследования генераторного режима асинхронного двигателя при конденсаторном самовозбуждении Создание специализированного лабораторного оборудования для проведения экспериментальных исследований статических и динамических режимов АД при конденсаторном самовозбуждении.
Введение.
Вопросы теории и практики конденсаторного возбуждения асинхронных двигателей (АД) достаточно подробно рассмотрены в отечественных и зарубежных литературных источниках [1,2,3]. Явление самовозбуждения асинхронной машины при подключении к статору конденсаторов необходимой емкости широко используется в промышленности для создания тормозного момента при необходимости организации эффективного и энергонезависимого режима торможения. В то же время, не вполне изученными остаются вопросы, касающиеся использования режима конденсаторного самовозбуждения АД для генерирования электроэнергии, в частности, для создания источников ава-рийного электропитания [4,5].
Цель работы.
Целью работы является создание специализированного лабораторного оборудования для проведения экспериментальных исследований статических и динамических режимов АД при конденсаторном самовозбуждении.
Материалы и результаты исследований.
Лабораторный комплекс для исследования АД в режиме асинхронного генератора должен обеспе-чивать:
- достаточный уровень остаточного намагничивания магнитной системы;
- достаточную частоту вращения АГ при определенном значении емкости конденсаторов;
- стабилизацию частоты вращения АГ при сбросах и набросах нагрузки (при подключении и отключении потребителей);
- регулирование емкостного тока при изменении характера нагрузки для поддержания в заданных пределах амплитуды генерируемого напряжения.
- возможность выбора схемы возбуждения в однофазном или трехфазном режиме;
- измерение и регистрацию таких параметров, как потребляемая генератором механическая мощность, мощность, отдаваемая потребителю, мощность потерь.
Для удовлетворения выше перечисленных требований разработан компьютеризированный лабораторный комплекс, позволяющий производить полномасштабные исследования качественных и количественных характеристик асинхронного генератора (рис. 1).
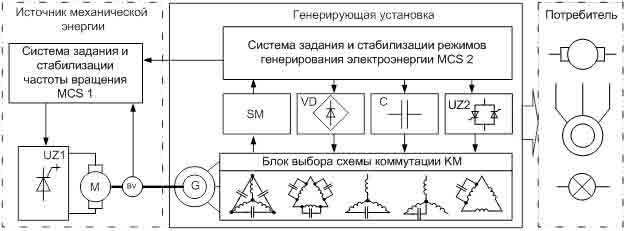
Рисунок 1 – Функциональная схема лабораторного комплекса
В качестве источника механической энергии используется машина постоянного тока независимого возбуждения М, оснащенная тахогенератором BV. Питание приводного двигателя осуществляется от тиристорного преобразователя UZ1. Сигнал задания на вход тиристорного преобразователя подается микроконтроллером MCS1, который обеспечивает поддержание заданной частоту вращения, значение которой может изменяться при подключении и отключении нагрузки.
Силовой канал генерирующей установки состоит из асинхронной машины G, тиристорного регулятора емкостного тока UZ2, емкостного возбудителя С, системы намагничивания стали VD. Блок выбора схемы коммутации КМ обеспечивает соединение силовых элементов, а также обеспечивает выбор схемы подключения измерительных датчиков ком-пьютеризированного измерительного модуля SM.
Управление измерительным и силовым каналами, а также управление приводным двигателем М осуществляется системой задания и стабилизации режимов генерирования электроэнергии MCS2.
В основу микропроцессорных систем MCS1 и MCS2, обеспечивающих стабилизацию выходных параметров генерирующей установки, положена функциональная схема, (рис. 2) содержащая следующие блоки:
- микропроцессор (МК) PIC18F458, который, в соответствии с алгоритмом управляющей программы, вырабатывает синхронизированные с питающим напряжением сигналы управления полупроводниковым преобразователем;
- программируемая логическая интегральная схема (ПЛИС) EPM7128SL, предназначенная для защиты и расширения функциональных возможностей цифровых входов/выходов мик-роконтроллера;
- блок синхронизации (БС), позволяющий микропроцессору определять моменты перехода питающего напряжения через ноль;
- блок индикации и клавиатуры (БКИ) для выбора требуемых режимов работы лабораторного комплекса, в частотности, для задания углов открывания тиристоров полупроводниковых преобразователей UZ1 и UZ2, а также, для отображения текущего состояния системы;
- формирователь импульсов (ФИ), обеспечивающий надежное отпирание тиристоров и достаточную нагрузочную способность цифровых выходов микропроцессорной системы;
- блок гальванической развязки (БГР) на оптотранзисторах TLP127;
- часы реального времени RTC (Real Time Clock) DS1302 и флэшпамять объемом 64К для регистрации событий и контролируемых параметров асинхронного генератора в процессе испытаний;
- устройство согласования (УС) для нормализации уровней входных аналоговых сигналов;
- интерфейс последовательной передачи данных на базе драйвера MAX232.
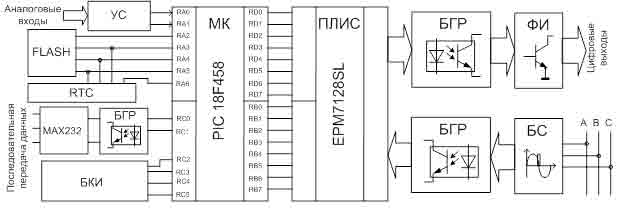
Рисунок 2 – Функциональная схема системы управления
Благодаря совместному использованию ПЛИС и МК значительно возрастает гибкость и функцио-нальные возможности системы управления. Так, при управлении полупроводниковыми преобразователями в разомкнутой системе, на МК возлагаются функции системы импульснофазового управления (СИФУ). При наличии сигналов обратных связей МК выполняет функции аналогоцифрового преобразователя и цифрового регулятора, а в качестве СИФУ используется ПЛИС, что позволяет существенно сэкономить ресурсы процессора.
Программирование и изменение конфигурации этих микросхем осуществляется с помощью интегрированных сред разработки MPLAB IDE v.6xx фирмы Microchip и MAX+plus II фирмы Altera. Загрузка готового проекта в ПЛИС осуществляется с помощью программатора ByteBlaster(MV), а программирование микроконтроллера – внутрисхемным отладчиком MPLAB-ICD 2 через соответствующие разъемы платы системы управления (рис.3).
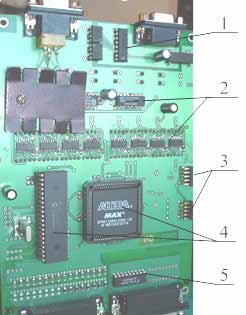
Рисунок 3 – Внешний вид платы управления: 1- MAX232; 2 - регистры БКИ; 3 - разъемы подключения программаторов; 4 - МК и ПЛИС; 5 – ФИ
Алгоритм функционирования микропроцессорных систем MCS1 и MCS2, представленный на рис.4, ориентирован на стабилизацию контролируемых параметров генерирующей установки (частоты вращения источника механической энергии М для MCS1, емкостного тока в цепи асинхронного генератора G для MCS2).
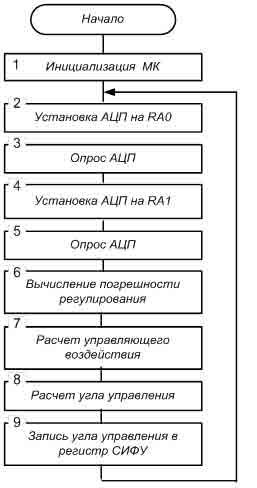
Рисунок 4 – Обобщенный алгоритм функционирования микропроцессорных систем MCS1 и MCS2
Программная реализация алгоритма осуществляется следующим образом. Для ввода аналоговых сигналов, используются разряды RA0, RA1 микроконтроллера, откуда эти сигналы передаются в тракт аналого-цифрового преобразования МК. Следует отметить, что, кроме аналогового ввода, предусмотрена возможность установки сигнала задания с помощью блока клавиатуры и индикации БКИ.
После поочередного опроса аналоговых входов, на которые подана информация о заданном и фактическом значении контролируемого параметра, с АЦП считываются результаты преобразования. Затем вычисляется ошибка регулирования.
Результаты расчета управляющего воздействия (блок 7) зависят от выбора способа программной реализации алгоритмов цифрового регулятора (ЦР). В качестве одного из простейших способов синтеза ЦР был взят способ, состоящий в предварительном синтезе непрерывного регулятора и последующем переходе к цифровому регулятору, эквивалентному синтезированному аналоговому [6].
На основании рассчитанного управляющего воздействия микропроцессор формирует текущее значение угла открывания тиристоров (блок 8), которое поступает на таймер, отвечающий за отсчет угла открывания тиристоров (блок 9). Далее сигнал усиливается и подается на тиристор. Затем осуществляется возврат к началу программы и процесс повторяется.
Доступные средства отладки и программирования МК дают возможность построения различных вариантов цифровых фильтров и выбора наиболее эффективных способов стабилизации контролируемых параметров в процессе экспериментальных исследований.
Выводы.
Представленный лабораторный комплекс позволяет изучать разнообразные режимы конденсаторного торможения АД, проводить широкий спектр научных исследований. Созданное оборудование может также эффективно использоваться в учебном процессе.
Список использованной литературы
1. Торопцев Н. Д. Асинхронные генераторы автономных систем. - М.: Знак, 1998.
2. Итоги науки и техники. Сер. Нетрадиционные источники энергии, т.3, М, Винити, 1992, 100 стр.
3. Бояр-Созонович С.П., Китаев А.В., Нетушил А.В. Самовозбуждение асинхронного генератора. - Изв.вузов. Электромеханика, 1981, № 6 , с. 612-617.
4. Бурляев В.В., Листвин В.С., Нетушил А.В. Неопределенность возбуждения асинхронных автономных генераторов - Изв.вузов. Техническая
электродинамика, 1984, № 6 , с. 73-77.
5. Шокарев Д.А., Рыков Г.Ю., Колесник Я.Н. Регуляторы ёмкостного тока в схемах конденсаторного возбуждения асинхронных генераторов. Вісник КДПУ.
Випуск № 1/2002 (12) Кременчук: КДПУ, 2002. с.422-425.
6. Ломака М.В., Медведев И.В. Микропроцессорное управление приводами. M.: Энергоиздат, 1990. 48с.