
Реферат за темою випускної роботи
Зміст
- Вступ
- 1. Актуальність теми
- 2. Мета і завдання дослідження, призначення
- 3. Математична модель
- 4. Огляд винаходу автоматичного включення резервного живлення
- 5. Обладнання та програмне забезпечення
- Висновки
- Перелік посилань
Вступ
Забезпечення якісного та безперебійного електропостачання систем власних потреб 6 кВ електростанції є основним завданням при організації технологічного процесу виробництва електроенергії. Технологічний процес на електростанції пов'язаний з роботою великого числа механізмів, до яких відносяться механізми, що забезпечують: подачу палива в топку котла, циркуляцію води, мастило підшипників численного обладнання, охолодження генераторів та інше. Короткі провали і перенапруги, в системі власних потреб, можуть призвести до порушення і зупинки всього циклу виробництва електроенергії, а також до виникнення аварій.
Дана робота присвячена питанню підвищення надійності електропостачання систем власних потреб з асинхронними двигунами, за рахунок застосування швидкодіючого автоматичного введення резерву в мікропроцесорному виконанні. Пропонований пристрій дозволяє скоротити час перерви в живленні і запобігти несинхронну подачу напруги на двигуни, які втратили живлення.
1. Актуальність теми
Асинхронні двигуни широко застосовуються в системах власних потреб електростанції, а також у різних галузях промисловості. Таке широке застосування асинхронних приводів пов'язано з їх простим і надійним конструктивно-економічним виконанням. Однак при зниженні напруги в мережі, в наслідок коротких замикань і короткочасних перерв живлення, не завжди забезпечується їх успішний самозапуск. Це призводить до порушення технологічного процесу і економічним збиткам. Тому, розробка мікропроцесорних АВР, що забезпечують успішний самозапуск двигунів, є актуальною темою.
2. Мета і завдання дослідження, призначення
Основною метою даної роботи є:
- Вдосконалення способу швидкодіючого АВР в системах електропостачання з асинхронними двигунами, що полягає у вимірюванні напруги прямої послідовності шин основного і резервного джерела живлення, і кута між ними, а також визначенні напрямку активної потужності на вводі шин основного живлення;
- Розробка швидкодіючого АВР на основі мікропроцесорного пристрою.
Для реалізації мети роботи, необхідно вирішити такі задачі:
- Розробка математичної моделі системи власних потреб електростанції з асинхронними двигунами;
- Реалізація, в математичній моделі, алгоритму швидкодіючого АВР заснованого на контролі напруги та активної потужності;
- Удосконалення алгоритму на основі аналізу отриманих результатів моделювання;
- Розробка схеми та програмного забезпечення мікропроцесорного швидкодіючого АВР для систем власних потреб.
Призначення
Мікропроцесорні швидкодіючі АВР призначені для забезпечення безперервного електропостачання споживачів шляхом їх перемикання на резервне джерело при перервах електроживлення, що забезпечують при цьому:
- Збереження динамічної стійкості рухового навантаження, підключеної до шин підстанції;
- Зменшення кількості відключень електродвигунів з причини відпадання контакторів при зниженні напруги;
- Скорочення тривалості перерви живлення, яке призведе до меншого зниження швидкості обертання ротора і швидкому подальшого самозапуск електродвигунів;
- Запобігання несинхронної подачі резервного напруги, щоб запобігти виникненню струмів в двигуні, що перевищують гранично допустимі. За рахунок цього збільшується ресурс двигунів;
- Збереження електроживлення інших споживачів, в тому числі систем і пристроїв автоматичного управління, забезпечуючи тим самим підвищення надійності електропостачання об'єкта в цілому.
3. Математична модель
Згідно [1], для оцінки можливості забезпечення безперервності технологічного процесу (надійності електропостачання споживачів і стійкості високовольтної електродвігательную навантаження) при короткочасних порушеннях електропостачання, що потрапляють в зону дії АВР, перевірки умов самозапуску електродвигунів після відновлення електропостачання споживачів складена узагальнена система рівнянь, що описує роботу різного типу електроприводів і мережі з ШАВР шляхом введення розділових коефіцієнтів b (характеризує явнополюсность) і k (характеризує стан обмотки збудження) в систему рівнянь Парка-Горєва та подання потокозчеплення у вигляді:
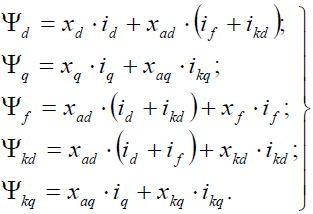
де xd = xad + xl + xs ;
xq = xaq + xl + xs ;
xl – опір розсіювання статора;
xs – опір живлячої мережі;
В результаті узагальнена система рівнянь прийме вигляд:
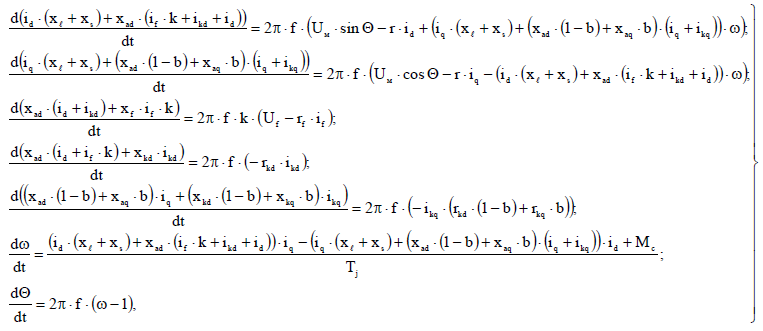
де k = b = 1 для явнополюсного СД;
k = 1, b = 0 для неявнополюсного СД;
k = b = 0 для АД.
На підставі узагальненої системи рівнянь розроблено математичну модель [1], що описує роботу електромеханічних комплексів з синхронними і асинхронними електродвигунами, системи електропостачання та ШАВР. Отримана модель дозволяє визначити допустиму тривалість перерви електропостачання СД і АД. Допустима тривалість перерви електропостачання - це максимальний час, після закінчення якого, відновлення напруги, агрегат повертається в стан, що попереднує втраті напруги. Для досліджень були прийняті параметри двигунів СТД-1250 і ПЕД-48. Отримані результати наведені на рис.1 і рис.2.
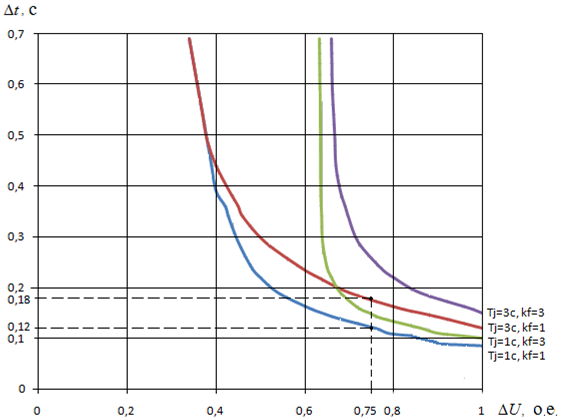
Рисунок 1 – Залежності допустимої тривалості перерви електропостачання синхронних двигунів від Тj , ΔU , kf
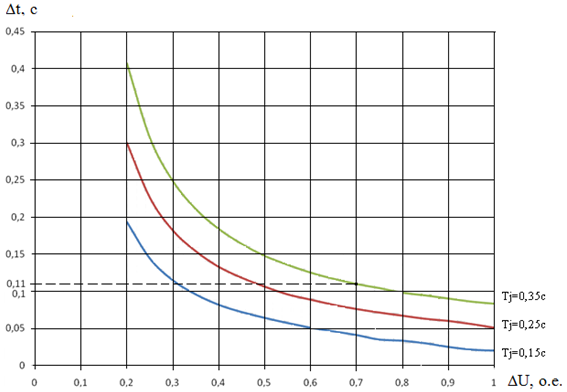
Рисунок 2 – Залежності допустимої тривалості перерви електропостачання асинхронних двигунів від Тj и ΔU
Як видно з отриманих залежностей [1], допустима тривалість перерви Δt електропостачання залежить від електромеханічної постійної часу агрегату Tj , величини провалу напруги ΔU і, в разі синхронного двигуна, коефіцієнта форсування kf . Для ΔU = 0,75 і Tj = 1–3 с у разі СД Δt = 0,12–0,18 с, для ΔU = 0,7 і Tj = 0,35 с у разі АД Δt = 0,11 с.
4. Огляд винаходу автоматичного включення резервного живлення
Як спосіб автоматичного включення резервного живлення для магістерської роботи, був обраний спосіб наведений у винаході [2]. Спосіб полягає в тому, що у відомому способі автоматичного включення резервного електроживлення споживачів, при якому вимірюють напругу прямої послідовності шин основного і резервного джерела живлення, вимірюють кут між вектором напруги прямої послідовності шин основного і резервного джерел живлення, визначають напрямок активної потужності на вводі шин основного джерела живлення, перемикають шини основного джерела живлення на резервний при зменшенні напруги прямої послідовності шин основного джерела живлення нижче заданого рівня або при збільшенні кута між вектором напруги прямої послідовності більше заданого і при напрямі активній потужності від шин до основного джерела живлення, згідно винаходу додатково вимірюють мінімальний струм вводу кожної секції, порівнюють його з заданим значенням струму введення і при перевищенні заданого струму здійснюють перемикання на резервне джерело живлення.
Крім того, відомий пристрій для автоматичного включення резервного електроживлення споживачів, що містить вводні вимикачі основного і резервного джерел живлення з блок-контактами і ключами управління, секційний вимикач з блок-контактами і ключем управління, трансформатори напруги на шинах основного і резервного джерел живлення, трансформатори струму на вводах основного і резервного джерел живлення, два реле захисту, згідно винаходу додатково забезпечено трансформаторами напруги, включеними до вступних вимикачів, швидкодіючим пусковим пристроєм, що містить блок управління, блок дискретних сигналів і констант, пристрій індикації, аналого-цифрові перетворювачі, входи яких пов'язані з виходами трансформаторів струму на вводах основного і резервного джерел живлення, трансформаторів напруги, включеними до вступних вимикачів в ланцюгах основного і резервного джерел живлення, і з трансформаторами напруги на шинах основного і резервного джерел живлення, виходи ж зазначених аналого-цифрових перетворювачів через блоки перетворення аналогових сигналів в дискретні підключені до входів блоків визначення мінімального струму, блоків визначення напрямку потужності прямої послідовності, блоків визначення мінімальної напруги основного і резервного джерел живлення, блоків визначення кута зсуву фаз між основним і резервним джерелом живлення, виходи перших двох підключені до логічних блокам І, сюди ж підключені виходи останніх двох через логічні блоки АБО, виходи блоків І з'єднані з першим і другим входами блоку управління, третій вхід блоку управління з'єднаний з блоком дискретних сигналів і констант, четвертий вхід з'єднаний з блоком індикації, п'ятий і шостий входи з'єднані відповідно з реле захисту, сьомий і восьмий входи з'єднані з блок-контактами і ключами управління відповідно основного і резервного джерел живлення, дев'ятий вхід блоку управління з'єднаний з блок-контактами і ключем управління секційного вимикача, при цьому блок управління подає сигнал на відключення вимикача основного (резервного) джерела живлення і від блок-контактів останнього подає сигнал на включення секційного вимикача.
На рис.3 представлена принципова схема пропонованого пристрою автоматичного включення резервного електроживлення споживачів, згідно [2].
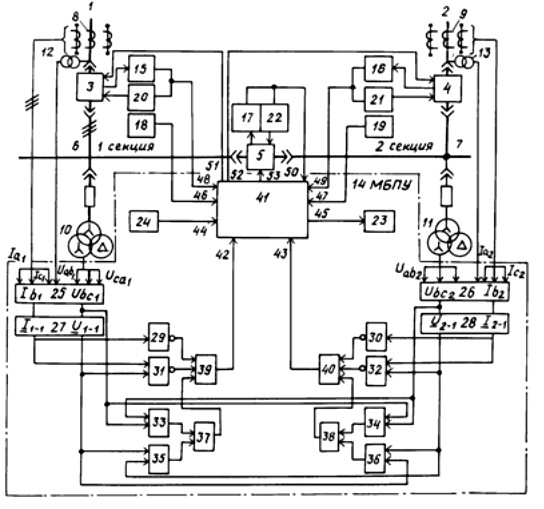
Рисунок 3 – Принципова схема автоматичного включення резервного електроживлення споживачів
Згідно [2], пристрій містить основний 1 і резервний 2 джерела живлення, ввідні вимикачі робочих вводів 3 і 4, секційний вимикач 5, шини підстанції 6 і 7, трифазні трансформатори струму 8, 9 на вводах основного і резервного джерел живлення і трансформатори напруги: 10, 11 – на шинах основного і резервного джерел живлення, 12, 13 – включені до вводних вимикачів; швидкодійне пусковий пристрій 14, блок-контакти 15, 16 вводних вимикачів основного і резервного джерел живлення, 17 – секційного вимикача, реле захисту 18, 19 на керовані вимикачі 3 і 4, керовані ключі включення-відключення 20, 21 вводних вимикачів основного і резервного джерел живлення, 22 – секційного вимикача. Швидкодіючий пусковий пристрій 14 містить блок індикації 23, блок дискретних сигналів і констант 24, аналого-цифрові перетворювачі 25, 26, входи яких пов'язані з виходами трансформаторів струму 8, 9 в ланцюгах основного 1 і резервного 2 джерел живлення, трансформаторів напруги 12, 13 до вводних вимикачів 3, 4 в ланцюгах основного 1 і резервного 2 джерел живлення, трансформаторів напруги 10, 11 основної і резервної секції, виходи ж зазначених аналого-цифрових перетворювачів 25, 26 через блоки перетворення дискретних вимірювань в діючі комплексні значення 27, 28 підключені до входів блоків визначення мінімального струму введення кожної секції 29, 30, блокам визначення напрямку потужності прямої послідовності 31, 32, блокам визначення мінімальної напруги 33, 34 основного 1 і резервного 2 джерел живлення, блокам визначення кута зсуву фаз 35, 36 між основним і резервним джерелом живлення. Виходи блоків визначення мінімального струму 29, 30 підключені до логічних блокам І 39, 40, сюди ж підключені виходи блоків визначення напрямку потужності прямої послідовності 31, 32 і через логічні блоки АБО 37, 38 підключені виходи блоків визначення мінімальної напруги 33, 34 і виходи блоків визначення кута зсуву фаз 35, 36. Виходи блоків І 39, 40 з'єднані з блоком управління 41: перший 42 і другий 43 входи, третій вхід 44 блоку управління 41 з'єднаний з блоком дискретних сигналів і констант 24, четвертий вхід 45 з'єднаний з пристроєм індикації 23, п'ятий 46 і шостий 47 входи блоку управління 41 з'єднані відповідно з реле захисту 18, 19 основного 1 і резервного 2 джерел живлення, сьомий 48 і восьмий 49 входи з'єднані з блок-контактами і ключами управління 15 20 і 16, 21 відповідно основного 1 і резервного 2 джерел живлення, дев'ятий 50 вхід з'єднаний з блок-контактами і ключем управління 17, 22 секційного вимикача 5, десятий-дванадцятий виходи 51–53 реалізують канали управління (у разі виконання їх на базі IGBT-транзисторів) вимикачами робочих вводів 3 і 4 і секційного вимикача 5.
Первинні обмотки трансформаторів струму 8 і 9 підключені до вводів джерел живлення 1, 2. Первинні обмотки трансформаторів напруги 10, 11 підключені до шин підстанції 6, 7, трансформаторів напруги 12, 13 включені на лінійну напругу до вводних вимикачів. За допомогою трансформаторів 10 і 11 також знімаються напруги нульової послідовності на кожній секції підстанції, що необхідно для реалізації додаткової функції пристрою – контролю несправності напруги.
Пристрій працює таким чином. За допомогою трансформаторів напруг 10 і 11 знімаються лінійні або фазні (за вибором) напруги на першій (Uab1, Ubc1, Uca1) і другий (Uab2, Ubc2, Uca2) взаємно-резервуються секціях розподільного пристрою живлення. За допомогою трансформаторів струму 8 і 9 здійснюються безперервні вимірювання миттєвих значень фазних струмів на першому (Ia1, Ib1, Ic1) і другого вводах (Ia2, Ib2, Iс2). Результати вимірювань надходять в блоки аналого-цифрових перетворювачів 25 і 26, де відбувається перетворення безперервних значень струмів і напруг в ряди дискретних вимірювань з кроком дискретизації 1200 Гц (24 точки на період частоти мережі).
Дискретні ряди вимірювань надходять в швидкодійне пусковий пристрій 14, де в блоках 27 і 28 відбувається перетворення результатів дискретних вимірювань в діючі комплексні значення струмів на вводах (I1) і напруг U1 на секціях підстанції. Одночасно від блоку дискретних сигналів і констант 24 в швидкодійне пусковий пристрій 14 подаються задані параметри уставок мінімальної напруги, мінімального струму, кута включення і відключення.
Швидкодіюче пусковий пристрій 14 перетворює діючі значення фазних струмів на вводах і напруг на секціях підстанції в комплексні діючі значення напруг U1-1 (U2-1) і струмів I1-1 (I2-1) прямої послідовності (блоки 27 і 28). Блокуючим сигналом для роботи пристрою є мінімальний струм і напрямок активної потужності прямої послідовності блоки 29 і 31 (блоки 30 і 32). Для реєстрації втрати живлення служать блоки мінімальної напруги 33, 34 і кута між векторами напруг прямої послідовності на першому U1-1 (друга U2-1) і другий U2-1 (перша U1-1) секціях (блоки 35, 36). Сигнали для роботи пристрою формуються за допомогою логічних блоків АБО (блоки 37 і 38), І (блоки 39 і 40) і надходять у блок керування 41, який управляє роботою підстанції в нормальному та аварійному режимах. При реєстрації виниклого аварійного режиму блок управління 41 по каналах керування 51, 53 (52, 53) виробляє відключення вступного вимикача 3 (4) пошкодженого введення 1 (2) і включення секційного вимикача 5. Осцилограми і параметри режиму роботи підстанції зберігаються в незалежній пам'яті і відображаються за допомогою блоку індикації 23.
Робота пускового органу пристрою здійснюється за рахунок програмної обробки результатів вимірювань. Програмне забезпечення мікропроцесорного пускового пристрою дозволяє управляти роботою швидкодіючого АВР відповідно до пропонованого алгоритму.
Коли активні потужності введення підстанції P1=U1-1I1-1cosφ1 або P2=U2-1I2-1cosφ2 спрямовані від джерела в навантаження, то пристрій АВР не працює, що б в системі електропостачання підстанції ні відбувалося. У нормальному режимі сигнал на вході блоків 29 і 31, 30 і 32 блокує за допомогою елементів 39, 40 подачу сигналу на включення секційного і відключення вводних вимикачів, секції підстанції працюють роздільно.
Для режимів з малими струмами (на рівні перешкод) на вводі, коли робота блоку напрямки активної потужності прямої послідовності непередбачувана, передбачена уставка мінімального струму, що задається в блоці 24. Якщо струм I1-1 (I2-1) менше Iуст, то робота пристрою розблокується так само, як при зміні напрямку активної потужності прямої послідовності.
У режимах, що потрапляють під зону дії АВР, коли активна потужність P1 (або P2) блоків 31 (32) змінює напрямок (від навантаження до джерела), напруга на вводі U1 < Uуст блоку 33 (або U2 < Uуст блоку 34) та блокуючі сигнали від вимикачів 15, 16, 17 і релейного захисту 18, 19 не перешкоджають роботі, то блок управління 41 подає сигнал на відключення вимикача першого 3 (другий 4) введення і від блок контактів останнього подає сигнал на включення секційного вимикача 5.
Якщо активна потужність P1 (або P2) блоку 31 (32) змінює напрямок (від навантаження до джерела), кут δ12 (δ21) блоку 35 (36) між векторами напруг прямої послідовності на першому U1-1 (друга U2-1) і другий U2-1 (перша U1-1) секціях підстанції задовольняє умові δ12>δуст (delta;21>δуст) та блокуючі сигнали від вимикачів 15, 16, 17 і релейного захисту 18, 19 не перешкоджають роботі, то блок управління 41 подає сигнал на відключення першого 3 (другого 4) вступного вимикача і від блок-контактів останнього подається сигнал на включення секційного вимикача 5.
Вступні 3, 4 і секційний вимикачі 5 пристрої забезпечені IGBT-транзисторами включення-відключення і можуть бути доповнені індукційно динамічним пристроєм прискорення, що дозволяє скоротити власний час включення і відключення вимикачів більш ніж у два рази. Індукційно динамічне пристрій прискорення запасає енергію в нормальному режимі роботи підстанції і за допомогою пристрою управління 41 по команді перемикається на котушку відключення (включення) вимикачів, подаючи підвищену напругу на ці котушки.
При наявності сигналу про напругу, що знімається до вимикача вводу за допомогою блоків 12 і 13, пристрій дозволяє забезпечити автоматичне відновлення схеми нормального режиму після відновлення електропостачання від основного джерела, якщо перемикання буде відповідати положенню ключів включення-відключення ввідних і секційних вимикачів 20, 21, 22.
5. Обладнання та програмне забезпечення
Швидкодіюче АВР найбільш доцільно реалізувати на мікропроцесорній платформі, заснованої на базі сучасного мікроконтролера STM32F4хх, виробництва компанії STMicroelectronics [3], що включає 32-бітове ядро нового покоління ARM Cortex-M4 з тактовою частотою 168 МГц [4].
Рисунок 4 – Процессорное ядро ARM Cortex-M4
(анімація: 5 кадрів, 5 циклів повторення, 180 кБ)
Ядро підтримує такі технології, як множення з накопиченням за один такт (single-cycle MAC), арифметика з насиченням, блок обчислень з плаваючою комою FPU (floating point unit), команди управління потоком даних SIMD (single instruction multiple data). Блок FPU сумісний зі стандартом IEEE 754 і дозволяє процесору виконувати широкий спектр математичних операцій над числами.
DSP-інструкції в ядрі Cortex-M4 виконуються за один такт. Більше немає необхідності використовувати додатковий DSP-контролер для обробки сигналів, можна скористатися одним STM32F4xx, об'єднуючи звичайний контролер і DSP на одному чіпі.
STM32F4хх проводиться по 90 нм технології з використанням вже довів свою ефективність прискорювача пам'яті (ART Accelerator), що дозволяє працювати з пам'яттю без затримок на максимальних швидкостях. Продуктивність на тактовій частоті 168 МГц становить 210 DMIPS. Мікроконтролер без праці впорається з цифровою фільтрацією, сверткой або перетворенням Фур'є. Структура мікроконтролерів STM32F4xx представлена на рис. 5.
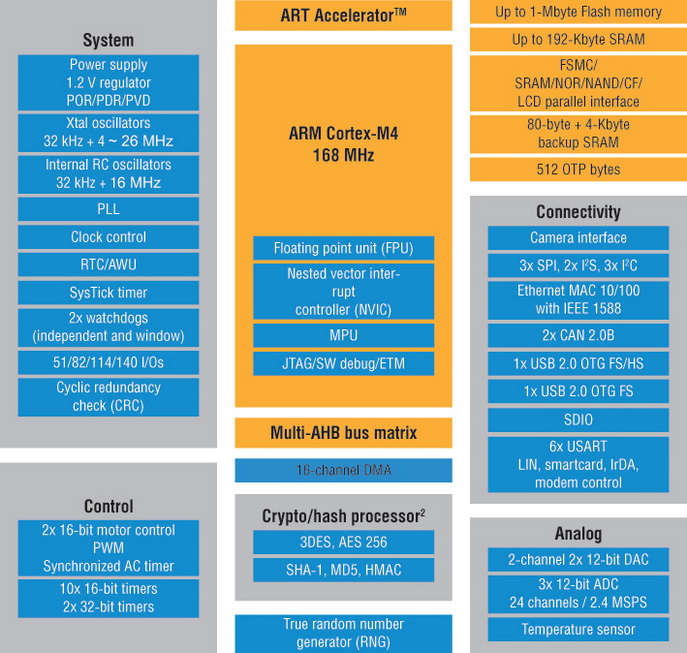
Рисунок 5 – Структура мікроконтролерів STM32F4xx
Основні характеристики STM32F4хх:
- Ядро ARM 32-bit Cortex-M4;
- Частота тактирования 168МГц, 210 DMIPS/1.25 DMIPS/МГц (Dhrystone 2.1);
- Підтримка DSP-інструкцій;
- Нова високопродуктивна AHB-матриця шин;
- 1 Mбайта Flash-пам'яті;
- 192 + 4 кбайт SRAM-пам'яті;
- Напруга живлення 1,8–3,6В (POR, PDR, PVD і BOR);
- Внутрішні RC-генератори на 16МГц і 32кГц (для RTC);
- Зовнішнє джерело тактирования 4–26МГц і для RTC – 32,768кГц;
- Модулі налагодження SWD/JTAG, модуль ETM;
- Три 12-біт АЦП на 24 вхідних каналу. Швидкість до 7,2 мегасемплов;
- Два 12-бітових ЦАП;
- DMA-контроллер на 16 потоків з підтримкою пакетної передачі;
- 17 таймерів (16 і 32 розряду);
- Два сторожових таймера (WDG і IWDG);
- Комунікаційні інтерфейси: I2C, USART (ISO 7816, LIN, IrDA), SPI, I2S, CAN;
- USB 2.0 FS/HS OTG;
- 10/100 Ethernet MAC (IEEE 1588v2, MII/RMII);
- Контроллер SDIO (карты SD, SDIO, MMC, CE-ATA);
- Інтерфейс цифрової камери (8/10/12/14-бітни режими);
- FSMC-контролер (Compact Flash, SRAM, PSRAM, NOR, NAND и LCD 8080/6800);
- Апаратний генератор випадкових чисел;
- Апаратне обчислення CRC, 96-бітний унікальний ID;
- Модуль шифрування AES 128, 192, 256, Triple DES, HASH (MD5, SHA-1), HMAC;
- Розширений температурний діапазон -40...105°C.
При розробці програмного забезпечення для мікроконтролера буде використовуватися зв'язка програм MDK Keil [5] + Matlab [6] + STM32MatTarget [7]. Використання пакета доповнення STM32MatTarget для програмного забезпечення Matlab/Simulink дозволяє більш швидко, а головне якісно реалізувати алгоритм швидкодіючого АВР на базі мікроконтролера STM32F4xx.
Пакет доповнення STM32MatTarget містить блоки для налаштування параметрів: портів і АЦП, зчитування і запису даних, таймерів і переривань (рис. 6). Дані блоки дозволяють реалізувати більшість завдань і систем пристроїв.
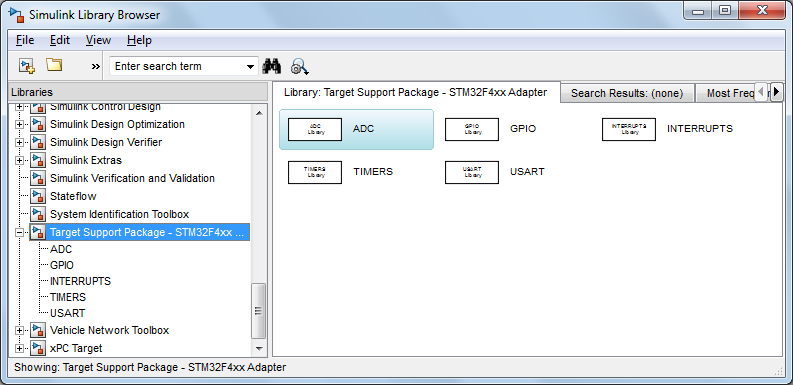
Рисунок 6 – Блоки пакета доповнення STM32MatTarget програмного забезпечення Matlab/Simulink
Висновки
- Розглянута математична модель для оцінки можливості забезпечення безперервності технологічного процесу.
- Розглянут спосіб виконання швидкодіючого АВР в схемах електропостачання з асинхронними двигунами.
- Застосування описаного пристрою, в поєднанні з сучасними швидкодіючими вимикачами, при втраті живлення на секції по будь-якої причини дозволить виконати перемикання живлення на резервне джерело за мінімально можливий проміжок часу і виключити несинхронну подачу напруги на вибігають двигуни, що значною мірою зменшує рівень і тривалість протікання пускових струмів двигуна.
- Запропоновано реалізувати алгоритм швидкодіючого АВР на базі мікроконтролера STM32F4хх з використанням зв'язки програм MDK Keil + Matlab + STM32MatTarget.
При написанні даного реферату магістерська робота ще не завершена. Інформація наведені вище, може відрізнятися від інформації та отриманих результатів, наведених у тексті виконаної магістерської роботи, яка буде завершена в січні 2015 р. Повний текст роботи та матеріали по темі можуть бути отримані у автора або його керівника після зазначеної дати.
Перелік посилань
- Муратбакеев Э. Х. Обоснование структуры и параметров многоуровневой системы электроснабжения объектов нефтедобычи с секционированием участков электрической сети – Санкт-Петербург, 2009
- Патент на изобретение 2326481(13)C1, Российская федерация, МПК H02J 9/06 Способ автоматического включения резервного электропитания потребителей и устройство для его осуществления / Цырук С.А., Гамазин С.И., Пупин В.М., Козлов В.Н., Павлов А.О.; заявитель и правообладатель Государственное образовательное учреждение высшего профессионального образования «Московский энергетический институт (технический университет)» (ГОУВПО «МЭИ(ТУ)»). – №2006139086/09; заявка 07.11.2006; опубл. 07.11.2006
- Офіційний сайт компанії STMicroelectronics [Електроний ресурс]. – Режим доступа: http://www.st.com/
- Офіційний сайт компанії ARM®Holdings [Електроний ресурс]. – Режим доступа: http://www.arm.com/...
- Офіційний сайт Keil uVision [Електроний ресурс]. – Режим доступа: http://www.keil.com
- Пакет доповнення STM32MatTarget [Електроний ресурс]. – Режим доступа: http://www.st.com/...
- Офіційний сайт MathWorks [Електроний ресурс]. – Режим доступа: http://www.mathworks.com/...