
Реферат за темою випускної роботи
Зміст
- Вступ
- 1. Актуальність теми
- 2. Мета і задачі дослідження та заплановані результати
- 3. Усунення провалів напруги в системах власних потреб
- 4. Математична модель для аналізу перехідних процесів у системі власних потреб
- 5. Розробка програми розрахунку перехідних процесів
- 5.1 Опис програмного середовища та алгоритму
- 5.2 Опис роботи програми
- Висновки
- Перелік посилань
Вступ
Власні потреби теплової електричної станції (ТЕС) – одна з найвідповідальніших частин енергозабезпечення блоків. У сучасних системах власних потреб основним навантаженням є синхронні і асинхронні двигуни.
Внаслідок коротких замикань відбуваються великі зниження напруги або перерви живлення. У момент відключення або значного зниження напруги у двигунів швидко знижується частота обертання. Цей процес, що триває у малопотужних двигунів частки секунди, а у великих двигунів – до 10 с, називається вибігом. На вибігу поступово загасають струми в обмотках, ЕРС, магнітні потоки. Поки вони не затухли повністю, двигуни на вибігу працюють як генератори, витрачаючи запасену ними енергію обертання на підтримку залишкового напруги в невідключеній від них мережі.
Надійність електропостачання значно підвищується, якщо для електродвигунів з приводними механізмами, від яких залежать безперебійна робота, передбачається самозапуск.
Для визначення двигунів, які можуть брати участь у самозапуску, необхідно здійснити аналіз перехідних процесів, розрахованих з високим ступенем точності.
Дана робота присвячена удосконаленню математичних моделей і створенню відповідних програмних продуктів для розрахунку перехідних процесів і подальше їх використання в розробках мікропроцесорного автоматичного вводу резерву (АВР), для забезпечення успішного самозапуску.
1. Актуальність теми
Забезпечення безперебійної роботи електричної станції (ЕС) залежить від створення надійної системи електропостачання власних потреб. При зниженні напруги для двигунів найбільш відповідальних виробничих механізмів передбачається самозапуск. Тому актуальним є питання удосконалення математичних моделей і створення відповідних програмних продуктів для розрахунку перехідних процесів, а також подальшого їх використання в розробках мікропроцесорних АВР.
2. Мета і задачі дослідження та заплановані результати
Метою даної роботи є розробка математичної моделі для дослідження перехідних режимів при зниженні напруги живлення в системі власних потреб і перехід на резервне джерело.
Основні задачі дослідження:
- Удосконалення математичних моделей для розрахунку перехідних процесів.
- Створення відповідних програмних продуктів.
Предметом дослідження є методи і алгоритми для моделювання математичної моделі перехідних процесів на електростанції.
У якості практичних результатів планується розробка програмного продукту на мові С ++ і подальше його використання при реалізації алгоритму роботи мікропроцесорного АВР.
3. Усунення провалів напруги в системах власних потреб
Найбільш поширеними способами усунення провалів напруги на сьогоднішній день є:
- Створення схем надійного живлення систем збудження для підвищення стійкості роботи синхронних електродвигунів;
- Узгодження схем підключення котушок керування магнітними пускачами зі схемою обмоток живильного силового трансформатора 6 (10) / 0,4 кВ для зменшення ймовірності відключення магнітних пускачів відповідальних електродвигунів при найбільш частих видах ушкоджень;
- застосування контакторів управління з
фіксатором
, що утримує їх у включеному положенні незалежно від наявності напруги в ланцюзі управління; - застосування схеми управління електродвигунами з додатковим проміжним реле;
- використання спеціальних схем, які передбачають повторне включення електродвигунів кількома послідовними чергами;
- застосування сучасного мікропроцесорного релейного захисту та автоматики, що дозволяють: збільшувати швидкодію захистів; скорочувати ступені селективності за часом; застосовувати в необхідних випадках принцип логічної селективності і відмовитися від ступенів селективності за часом; здійснювати діагностику стану електрообладнання і тим самим запобігати можливі аварії [1];
- використання схеми звичайного АВР або автоматичного повторного включення. Звичайне АВР забезпечує включення резервного живлення після відключення ввідного вимикача і після загасання напруги на резервованій секції. На промислових підприємствах необхідно забезпечувати безвідмовну роботу схем АВР на напрузі 10 (6) і 0,4 кВ;
- впровадження спеціальних пристроїв для виконання швидкодіючого АВР на напрузі 10 (6) кВ;
4. Математична модель для аналізу перехідних процесів у системі власних потреб
На рисунку 4.1 зображена принципова схема електричної системи з асинхронними і синхронними електродвигунами.
Рисунок 4.1 – Вихідна принципова схема електричної системи
(анімація: 5 кадрів, 6 циклів повторення, 106 кілобайт)
Розрахункову схему складають на основі заданої принципової схеми електричної системи і схем заміщення її окремих елементів, які з деякими спрощеннями використовуються в даній роботі.
Розрахункова схема заміщення представлена опорами (активним, індуктивним) і ЕРС системи, опорами вимикачів, шунта КЗ, заземлювача і опорами статора асинхронного і синхронного електродвигунів потужністю 4000 і 6000 КВт відповідно.
Математична модель, яка створена на основі повних диференціальних рівнянь, дозволяє досліджувати перехідні процеси в системі власних потреб ТЕС набагато точніше, ніж методики, засновані на найпростіших алгебраїчних рівняннях.
Дана робота спрямована на усунення недоліків спрощених методів розрахунку і для удосконалення реалізації математичних моделей.
Математична модель даної схеми складається з диференціальних рівнянь для її основних елементів.
Для опису асинхронного двигуна (АД) будемо використовувати його двоконтурну схему заміщення, яка дозволяє досить точно врахувати явище витиснення струму в роторі [2]. Будемо використовувати відомий метод отримання параметрів двоконтурної схеми заміщення на основі каталожних даних.
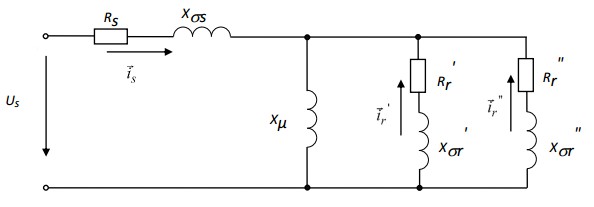
Рисунок 4.2 – Схема заміщення АД
Диференціальні рівняння, що описують поведінку АД в перехідному режимі, в нерухомій системі координат можна представити як:
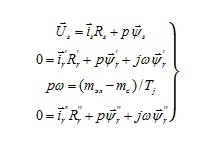
де:
![]() – результуючі вектори напруги, струмів і потокозчеплень статора і ротора;
– результуючі вектори напруги, струмів і потокозчеплень статора і ротора;
![]() – обертаючий момент двигуна і момент опору механізму;
– обертаючий момент двигуна і момент опору механізму;
![]() – постійна часу агрегату.
– постійна часу агрегату.
w – частота обертання ротора
Явнополюсні синхронні двигуни, з метою можливості забезпечення асинхронного пуску забезпечуються пусковий обмоткою, стрижні якої закладаються в полюсні башмаки ротора і електрично з'єднуються між собою, а також зі стрижнями сусідніх полюсних башмаків. У результаті утворюється так звана повна пускова обмотка в осях d і q і обмотка збудження по осі d.
Визначення параметрів схем заміщення синхронної машини за каталожними даними.
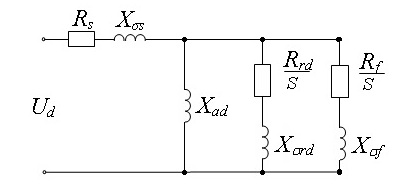
Рисунок 4.3 – Схема заміщення явнополюсного синхронного двигуна по осі d
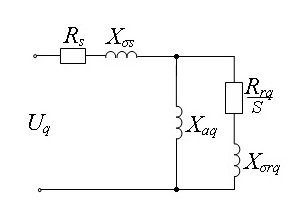
Рисунок 4.4 – Схема заміщення явнополюсного синхронного двигуна по осі q
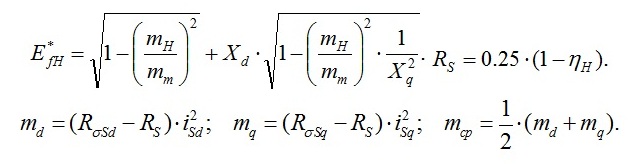
Параметри обмотки збудження:
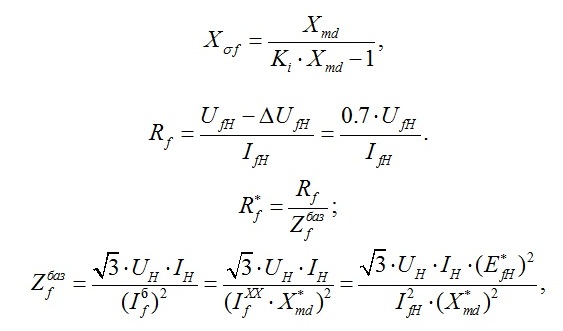
де:
Математичне моделювання перехідних процесів проводиться для миттєвих значень струмів і напруг. Для цієї мети скористаємося законами Ома і Кірхгофа, згідно з якими потрібно скласти диференціальні рівняння для струмів і напруг гілок і вузлів заданої схеми. Алгоритми розрахунків складемо на основі матричних методів.
5. Розробка програми розрахунку перехідних процесів
5.1 Опис програмного середовища та алгоритму
Для розробки програми використовувався багатоплатформовий інструментарій Qt для розробки програмного забезпечення на мові С++.
Він дозволяє запускати написане з його допомогою програмне забезпечення (ПЗ) в більшості сучасних операційних систем, шляхом простої компіляції програми для кожної ОС без зміни початкового коду. Включає в себе всі основні класи, які можуть знадобитися при розробці прикладного програмного забезпечення, починаючи від елементів графічного інтерфейсу і закінчуючи класами для роботи з мережею, базами даних і т.д.
Також був використаний Qwt або Qt Widgets for Technical Applications – набір Qt–віджетів і допоміжних класів, необхідних для створення графічного представлення числових даних.
5.2 Опис роботи програми
Для розрахунку перехідного процесу попередньо були знайдені параметри схеми заміщення в доаварійному режимі.
Розрахунок будемо вести за миттєвим значенням змінних, шляхом чисельного рішення диференціальних рівнянь (ДУ). Крок розрахунку приймемо рівним 0.001 секунди.
Вважаємо, що ЕРС генераторів і джерела струму змінюються за синусоїдальним законом з частотою 50 Гц, а їх початкові фази визначаємо з доаварійний режиму.
Для побудови графіків перехідних процесів в елементах системи необхідно вирішити диференціальні рівняння. Для цього був використаний математичний метод Рунге - Кутта [3].
Класичний метод Рунге - Кутта 4-го порядку описується наступною системою п'яти рівностей:

де:
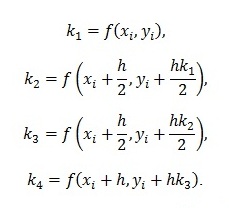
Існує не один, а група методів Рунге-Кутта, що відрізняються один від одного порядком, тобто кількістю параметрів kj. У даному випадку ми використовуємо метод 4-го порядку, який є одним з найбільш вживаних на практиці, тому що забезпечує високу точність і водночас відрізняється порівняльною простотою.
Реалізація методу Рунге – Кутта в Qt:
void func_RK(Matrix &I, double t, double h, double Q1, double Q2, double Totk, double RQ1otk, double RQ1, double RQ2otk, double RQ2, double LQ1otk, double LQ1, double LQ2otk, double LQ2, Matrix &pr, Matrix &NvTR1, Matrix &NvTR2, Matrix &Tm1, Matrix &Tm2, Matrix &Nv_Q1,Matrix &Nv_Q2, double Um, double w, double Tkz, double Totk_kz, int KZ, double Rsh, double Rsh_KZ, double Lsh, double Lsh_KZ, Matrix &Nv_Sh_KZ, Matrix &R, Matrix &L, Matrix &P, Matrix &E, Matrix &Nv_E, Matrix &V, Matrix &Uuzl, Matrix &Uvet, Matrix &Dif, Matrix &RK)
{
int i;
double t2=t+(h/2), t3=t+h;
Matrix k1(I.rows);
Matrix I2(I.rows);
DD(I, t, Q1, Q2, Totk, RQ1otk, RQ1, RQ2otk, RQ2, LQ1otk, LQ1, LQ2otk, LQ2, pr, NvTR1, NvTR2, Tm1, Tm2, Nv_Q1, Nv_Q2, Um, w, Tkz, Totk_kz, KZ, Rsh, Rsh_KZ, Lsh, Lsh_KZ, Nv_Sh_KZ, R, L, P, E, Nv_E, V, Uuzl, Uvet, Dif);
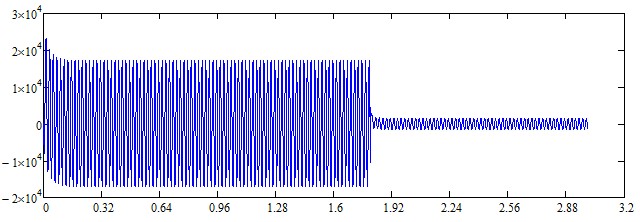
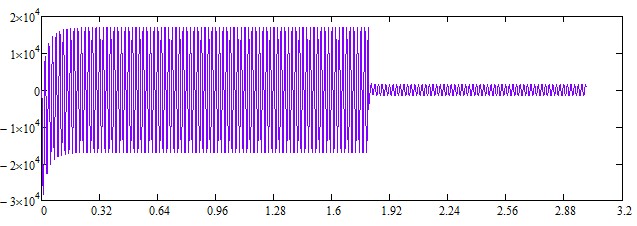
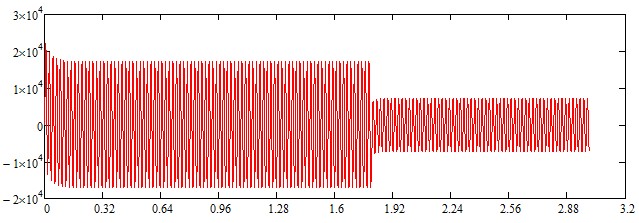
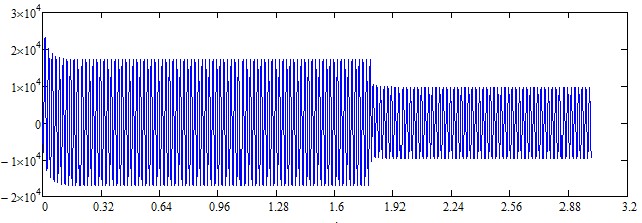
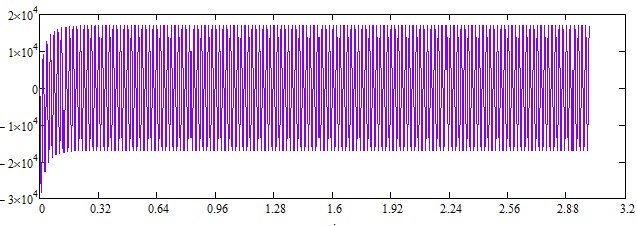
for(i=0;i { k1[i][0]=h*Dif[i][0]; I2[i][0]=I[i][0]+(k1[i][0]/2.0); } Matrix k2(I.rows); DD(I2, t2, Q1, Q2, Totk, RQ1otk, RQ1, RQ2otk, RQ2, LQ1otk, LQ1, LQ2otk, LQ2, pr, NvTR1, NvTR2, Tm1, Tm2, Nv_Q1, Nv_Q2, Um, w, Tkz, Totk_kz, KZ, Rsh, Rsh_KZ, Lsh, Lsh_KZ, Nv_Sh_KZ, R, L, P, E, Nv_E, V, Uuzl, Uvet, Dif); for(i=0;i { k2[i][0]=h*Dif[i][0]; I2[i][0]=I[i][0]+(k2[i][0]/2.0); } Matrix k3(I.rows); DD(I2, t2, Q1, Q2, Totk, RQ1otk, RQ1, RQ2otk, RQ2, LQ1otk, LQ1, LQ2otk, LQ2, pr, NvTR1, NvTR2, Tm1, Tm2, Nv_Q1, Nv_Q2, Um, w, Tkz, Totk_kz, KZ, Rsh, Rsh_KZ, Lsh, Lsh_KZ, Nv_Sh_KZ, R, L, P, E, Nv_E, V, Uuzl, Uvet, Dif); for(i=0;i { k3[i][0]=h*Dif[i][0]; I2[i][0]=I[i][0]+k3[i][0]; } Matrix k4(I.rows); DD(I2, t3, Q1, Q2, Totk, RQ1otk, RQ1, RQ2otk, RQ2, LQ1otk, LQ1, LQ2otk, LQ2, pr, NvTR1, NvTR2, Tm1, Tm2, Nv_Q1, Nv_Q2, Um, w, Tkz, Totk_kz, KZ, Rsh, Rsh_KZ, Lsh, Lsh_KZ, Nv_Sh_KZ, R, L, P, E, Nv_E, V, Uuzl, Uvet, Dif); for(i=0;i { k4[i][0]=h*Dif[i][0]; RK[i][0]=I[i][0]+(k1[i][0]+2.0*k2[i][0]+2.0*k3[i][0]+k4[i][0])/6.0; } } У програмі змодельовані різні види коротких замикань в мережі власних потреб і отримані графіки зміни струмів в фазах. Рисунок 5.2.1 – Графік перехідного процесу при трифазному КЗ (фаза А, В, С) Рисунок 5.2.2 – Графік перехідного процесу при двофазному КЗ (фаза А, В, С) У результаті науково-дослідної роботи були зібрані і вивчені матеріали з питань, пов'язаних з темою магістерської роботи. У середовищі програмування Qt була розроблена програма розрахунку усталеного режиму мережі, а також змодельовано перехідний процес при різних видах КЗ. Даний програмний продукт може бути використаний для розробки та вдосконалення швидкодіючого АВР, щоб мінімізувати час перемикання на резервне джерело живлення. При написанні даного реферату магістерська робота ще не завершена. Остаточне завершення: грудень 2014 року. Повний текст роботи та матеріали по темі можуть бути отримані у автора або його керівника після зазначеної дати.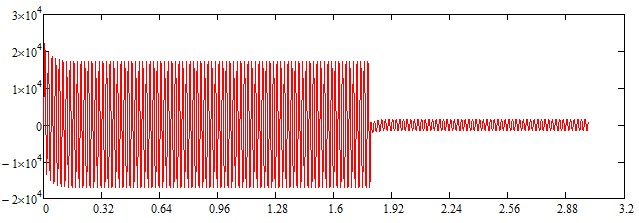
Висновки
Перелік посилань