
Abstract
Maintenance
- Introduction
- 1. Relevance of the topic
- 2. The goal, objectives and expected results of the research
- 3. Analytical review
- 4. Research part
- 4.1 The robot - manipulator Katana
- 4.2 The control system of a robot manipulator for one degree of freedom
- 4.3 Algorithm of compliance
- 4.4 Adaptive compliance algorithm
- Conclusion
- References
Introduction
With an increasing of complexity of today's systems, there is an extremely important task to simplify handling, as well as, the suppression of random factors (disturbances) which is negatively affecting their work. In case of extreme complexity of biological systems, such questions are even more critical in them. Thus, methods for solving engineering problems, that are used in nature, can also be applied to artificial systems, which perform similar functions.
Range of mechanical disturbances, which robot undergoes, cannot be predicted in robots with complex behavior. Thus, a mechanism, which capable of suppressing of undesirable effects or capable of detecting them and responding to them, is required. In nature, elasticity and compliance are used for these purposes.
In case of mechanical parts of the robots are rigid and do not tolerate excessive load, breaking transmissions under random mechanical effects on the robot, a mechanism that would be reduced and adjusted excess load is required.
By using of the control system of electric drives of the robot, It’s possible to achieve the effect of compliance for each joint, including compliance for disturbances, which are below than robot’s drag torque of transmission for a response to a very weak disturbances.
Moreover, this property is applicable to many tasks.
1. Relevance of the topic
Compliance mechanism helps to solve several problems. One of them is the interaction with the robot without any additional interface. The solution to this problem is central to this work, because it doesn’t requires additional mechanisms.
Compliance allows both to expand the number of available human-robot interactions and avoid possible injuries, if drives of the manipulator are powerful enough.
Also it can be used to program the robot. For example, by recording of information about the movement during a person moves manipulator by his own arm without efforts. This mechanism is extremely topical, because complexity of programming and service of robots is the reason of complications with implementation of these robots. With the appearance of possibility of programming of the robot simply by moving end effector or imitator in the desired position by hand, the complexity of programming is excluded.
Another application of compliance mechanism is to prevent excessive loads. Using variable resistant (excavator) characteristics , which depend on the strength and character of the external load, it is possible to distribute the load among all the actuators on the robot or stop it without exceeding of the permissible value.
Another important feature of compliance and elasticity is a mechanism, which applies when competition between external tasks and task of compliance mechanism exists. Balance of this inputs suppresses unwanted vibrations and adapt end effector to the characteristics of the surfaces of objects of robot’s interaction. For biped robots, it helps to avoid loosening during movement of robot and adjust to uneven surfaces.
For robot -manipulators, it helps suppress fluctuations of cargo if they arise, or other elastic vibrations associated with an abrupt change of the load. Or for making tight embrace of things irregularly shaped or fragile items, without exceeding the pressure that would damage it.
2. The goal, objectives and expected results of the research
Create a system of adaptable compliance for one degree of freedom on the basis of the available robot-manipulator Katana. Get graphics that reflect the operation of the system. Examine the impact of changes of the coefficients of PID controller on the system. Get dependences and debug the system taking into account these factors.
For achievement of this goal, it’s necessary to solve the following tasks during the work:
- Elaborate freely programmable control system with sufficient speed, adapted to control of the drive of robot - manipulator.
- Write a program that performs PID control with loops of the current, velocity and position. Explore the system, to find the optimal coefficients.
- Compose and program algorithm, which is ensuring compliance.
- Program the neural network, which would adapt the PID coefficients to external loads, depending on the target compliance.
- Get the results of working of the system and analyze the impact of PID coefficients on the compliance mechanism.
Object of the research: Robot - manipulator Katana.
Subject of research: Algorithm of adaptable compliance.
The main practical and scientific results, their meaning:
- Got robot - manipulator with compliance for use in various algorithms and further study.
- Got system of control of positions and actions of the robot, which doesn't need programming.
- Also, it's possible to estimate external load and distribute loading among the joints of the robot with this system.
3. Analytical review
Compliance of robots are used for many tasks, usually considering both passive [1] and active [2] compliance and elasticity.
By passive compliance, it means constructive compliance, created by usage of flexible materials in the construction of the robot or by system of springs, or other mechanical application (for example, Harmonic Drive gearboxes) [3].
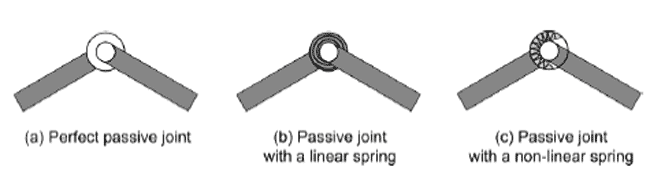
Figure 1 – Types of passive joints
Mechanisms for supplying of passive compliance, actively used in robotic systems [4], but their usage leads to significant increasing of costs and complexity of service, because they significantly complicate the system and are optional applications. Also, typically, such manipulators become specialized for a particular problem, since their rigidity and ductility is strictly limited, and regulation is not always possible. Active compliance defined solely by correction of control signal for actuators of the robot. The main difficulty in such systems is the reliable determination of the parameters of the object, the character of the external action and necessity of high performance control system for timely correction of the input of the drive.
There is distinction between systems with additional sensors, which type is depending on the task, which algorithm of compliance solves (accelerometers for vibration absorption or pressure sensors for monitoring value of pressure of end effector onto fragile objects), and sensorless systems with indirect definition of parameters. In the case of sensorless system, the task of determining and controlling of parameters is complicated.
4. Research part
It’s devoted to preparing of manipulator Katana for research of mechanism of active compliance with the indirect determination of the parameters by changing the coefficients of the PID controller, development of compliance algorithm and its study.
4.1 The robot- manipulator Katana

Figure 2 – Robot-manipulator Katana 200 (Neuronics)
Katana is a programmable robot [5], but its basic features make impossible an implementation of the required algorithm. It’s impossible to elaborate compliance algorithm without data from the sensors of current and velocity, as well as, without possibility of force changing, which depends on external factors unrelated to the work of its sensors and not recorded in the base functions.
However, high sensitivity of sensor and accuracy of the positioning of Katana robot can retrieve data with high accuracy, sufficient for during task.
Thus, the first task is to create a completely free programmable control system which allows to control of all hardware of the robot completely. For these purposes, firstly, platform Arduino Nano, which based on microcontroller ATmega 168, was chosen.
As actuator was used bridge Gravitech controlled by Arduino.
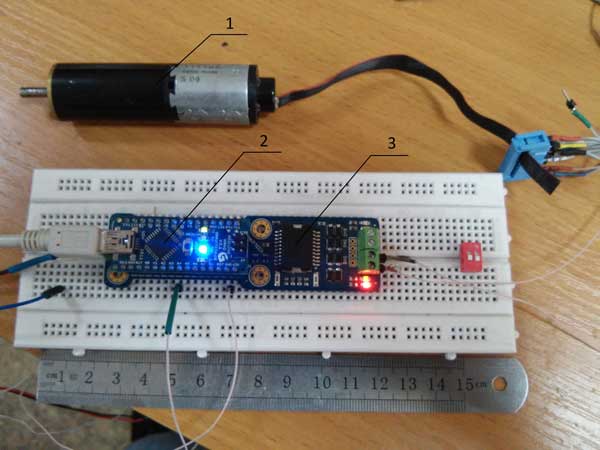
Figure 3 – Appearance of electric drive based on Arduino (power source not shown)
In Figure: 3 – The Motor Unit is consisting of gear, DC micromachine with permanent magnet and the encoder;
2 – ArduinoNano; 3 – monocrystalline bridge Gravitech.
With this application it is possible to operate DC micromachines with permanent magnet, which used in the robot Katana, by using PWM, as well as, receive data of the magnitude of the armature current.
Because regulation was originally intended to set the contours of the laws of PID control with forming a three-loop control system of the position, and base on it an algorithm that provides adaptable compliance, there was a problem of data accuracy of feedbacks and calculating of coefficients of discrete PID controller. After implementing the control system based on Arduino, aroused problem of necessity of a large number of the time-dependent calculations, such as counting of the encoder pulses, PWM generation, forming graphs of operation of the drive in dependence of the amount of displacement in the position loop. Thus, there is a need to use more than one controller. In addition to the first, was used platform Arduino MEGA.
Calculated velocity is transferred to the control system, Arduino Nano, by the I2C bus. This complicates calculation of coefficients of PID and accurate determination of the velocity, as runtime and transmission through I2C affect on their values.

Figure 4 – Equation of discrete PID
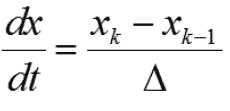
Figure 5 – Equation of accounting of discreteness in constants of time.
Solution of this problem would be possible by separation function of the speed feedback and position feedback on different controllers, but this would require usage more than one microcontroller. In the future, for making compact application and ease usage of controllers, simpler solution would be to use directly microcontrollers Atmega, not the platform Arduino. Because, usage of timers already requires working with registers ATmega, beyond the software functions provided by Arduino language C++. This would allow organizing such work of controllers, which would not interfere with the formation of the PWM. Also, chosen platform has insufficient accuracy of the measurement of armature current.
To simplify working with the control system of the robot, I decided to replace the controller based on the platform Arduino with specialized controller EPOS 24/1 of Maxon Motors.
This controller is designed to control the DC micromachines in robotic systems and contains precision control loops with automatic calculation of time constants. It does not contain specialized software package for designing programs, but provides developers DLL library for controller, programmed by C++, which allows you to program microcontroller freely.
Thus, сontroller EPOS was chosen.
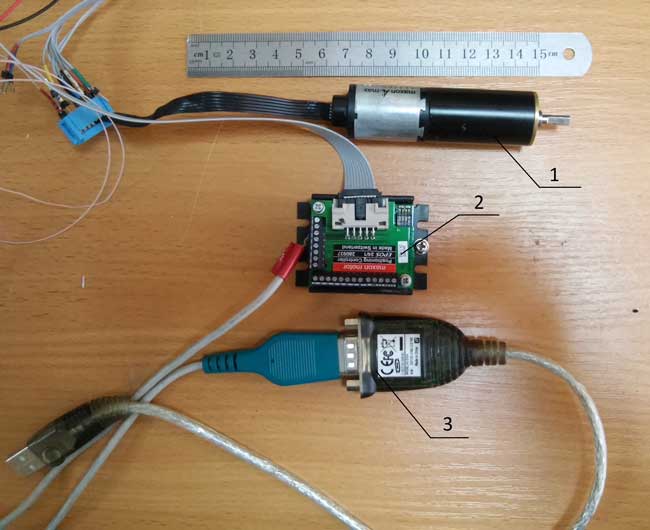
Figure 6 – Appearance of electric drive based on EPOS (power supply not shown)
На рисунке 6: 1 – The Motor Unit consists of gear, DC micromachine with permanent magnet and the encoder;
2 – Controller EPOS; 3 – converter (RS-232/USB-COM).
4.2 The control system of a robot manipulator for one degree of freedom
EPOS controller was connected directly to the motor driving one of the joints of the manipulator, the controller connects to the computer via protocol RS232.
Electric control system of the robot manipulator is a classic PID triple-loop of position control.
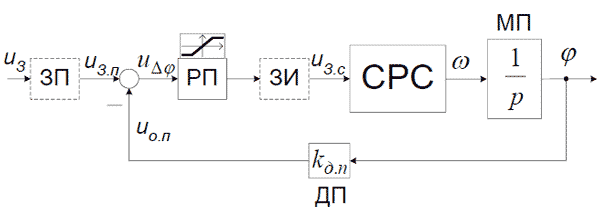
Figure 7 – Generalised sheme of control system of position
For proper configuration of the position contour, trajectory generator is used as the position setter with various methods of correction. In general, they either allow a small overshoot, which is acceptable for a robotic arm, or use the landing speed. The magnitude of the landing speed and the width of usage of landing speed are given by tuner. Because any degree of freedom of robot has a varying inertia, which depends on the position of the manipulator, as well, as depends on an object that moves the manipulator, it’s hardly possible to build a single curve for all movements. Therefore, the principles, which allow overshoot and landing speed, are used [6].
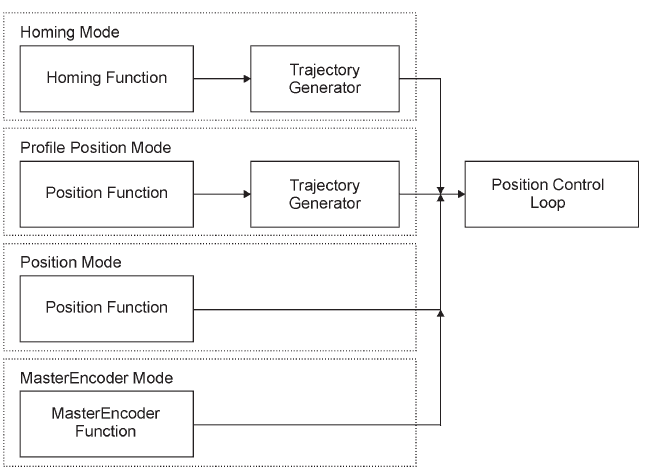
Figure 8 – Structure of the position setter of controller EPOS
4.3 Algorithm of compliance
Compliance algorithm is an outer loop for the position control system. And at this stage of the work, it’s the only system that provides position reference. In the future, it is required to combine it with the assignment of the position by operator to supply compliance mechanism under dynamic conditions, which is not considered in this paper.
Compliance algorithm is a circuit with a P controller which described by the following equation:
Where: θi – position reference at the previous step
θi+1 – position reference in the current step
Δθ – change of position caused by perturbance
K – gain of the P controller
Thus, when K > 0, there is a strengthening of perturbation, so manipulator "runaway", what makes it easier to control them manually. When K < 0, manipulator resist disturbance and tend to return to its original position.
Mode K < 0 is required only in the case of dynamic load reduction and softening loop of position control.
Mode K > 0 is the compliance regime. Due to evasion of manipulator from the perturbation, the actual magnitude of perturbation is decreased, so, the evasion stops. The result of this algorithm is an equilibrium regime in the form of short-cycle perturbation-evasion, allowing reducing the force, required to move the manipulator. One disadvantage of this algorithm is the need to overcome the static friction of joints of manipulator. For small manipulators this drawback is irrelevant, because it does not need to exert strong force to overcome it. In case if the manipulator has significant value of static friction, this disadvantage becomes significant and may lead to the inability of human interaction with manipulator.
One of the important factors is response of position control system on position reference applied by algorithm of compliance. It depends on the coefficients of PID regulatior.
4.4 Adaptive compliance algorithm
Adaptive compliance includes correction of factor K from the equation for compliance control, as well as, reconfiguration of the coefficients of the position control of the manipulator.
Consideration of this algorithm requires additional experimental data of response of the system with different PID coefficients. It is known, that for small values of Kp gain (1-3) of position controller, impact on the system is slight, but for value of Kp = 16 system becomes too rigid. In the future, requires clarification of settings of regulators in connection with the compliance mechanism.
One realization of the response to the impact of lower perturbations than static torque of manipulator joints is presented in the animated picture. In the static mode motor armature is fed with low-frequency sine wave with a period, much less than the electromagnetic motor constant, in case of eliminating the influence of dynamical regimes on the algorithm. The amplitude of the applied voltage is less than the voltage that will lead to the operating of the manipulator. External force, which attached to the sinusoidal signal, leads to a break-out of manipulator and getting information about the direction and character of perturbance by position and current sensors.
After reaching the end position, robot makes recalculating of starting torque value in case of changing of conditions of the masses.
The disadvantage of this algorithm is the constant work of drive of the manipulator, which is unacceptable for a mobile robot with a battery or for drives with high starting torque value. Therefore, this mode is recommended to include only temporarily for increasing the sensitivity of the manipulator for disturbances, if it’s necessary.
More frequent solution is equipment of manipulator with additional pressure sensors that allow directly receive all the necessary information about the mechanical perturbances, faced by manipulator.
Figure 9 – Modification of compliance algorithm for perturbance, which lower than operating torgue of robot
(animation: 12 frames, 7 cycles, 192 kilobytes)
Conclusion
During the work, the fully programmable control system for robot manipulator controller-based EPOS was created. Also adaptive algorithm for compliance robot manipulator was studied.
The most important conclusions and recommendations:
- During the synthesis of discrete control system for robot-manipulator with high precision of work, constant attention to constants of time of all sensors and regulators, including the iteration code is required.
- Compliance algorithm requires improvements for manipulators with large quantities of static friction.
- For supply of compliance sensitive sensors and fast control system are required.
Note. When writing this text, the work was still in progress, so the essay contains results available at the time of the exam on the subject Internet-technology. The deadline for master’s thesis and date of defense – January 2015.
References
- I.Thorson, A Variable Stiffness Actuator for Use in Passive-Dynamic Robots [Электронный ресурс]– Режим доступа: http://www.roboloco.net/research/thorson-robomec-2007-poster.pdf
- A. Pashkevich, Modeling and Parameter Identification of Harmonic Drive Systems [Электронный ресурс] - Режим доступа:http://hal.archives-ouvertes.fr/docs/00/58/31/67/PDF/Enhanced_stiffness_modeling_of_manipulators_with_passive_joints_v57.pdf
- H.D. Taghirad, Modeling and Parameter Identification of Harmonic Drive Systems [Электронный ресурс] - Режим доступа:http://saba.kntu.ac.ir/eecd/aras/papers/J5-JDSMC98-model.pdf
- T.A. Dwarakanath, In-Parallel Passive Compliant Coupler for Robot Force Control [Электронныйресурс]- Режим доступа: http://cimar.mae.ufl.edu/CIMAR/pages/pubs/pccfc.pdf
- В.В. Рябченко, Программно-аппаратный комплекс управления роботами-манипуляторами фирмы NEURONICS AG [Электронный ресурс]- Режим доступа: http://www.uran.donetsk.ua/~masters/2012/etf/snegina/library/article%2022.htm
- Спецификация программного обеспечения для контролеров EPOS [Электронный ресурс]- Режим доступа: http://www.maxonmotor.com/medias/sys_master/8803613540382/EPOS-Firmware-Specification-En.pdf
- E. Amrollah, P. Henaff, On the role of sensory feedbacks in Rowat–Selverston CPG to improve robot legged locomotion // Frontiers in Neurosciences. Neurorobotics 4, 113, 2010. – 9 p. [Электронный ресурс]. – Режим доступа: http://www.ncbi.nlm.nih.gov...
- A. A. Melnyk, P. Henaff, S. Razakarivony, V. Ph. Borisenko, P. Gaussier, Adaptive Behavior Of An Electromechanical Arm Robot In a Case
Of Physical Interaction With a Human Being [Электронный ресурс]. – Режим доступа: http://ieeexplore.ieee.org/xpl/...