Аннотация
Устименко Д.С., Сравнительный анализ механических характеристик электрических приводов перемещения очистных комбайнов. В статье рассказывается об анализе возможного диапазона регулирования в двигателях постоянного и переменного тока.
Проблема и ее связь с научными и практическими задачами.
Создание очистных комбайнов для тонких пластов с высокими функционально-параметрическими характеристиками невозможно без применения в механизме перемещения электрических приводов. В частности, в Украине начинают широко применяться частотно-регулируемые привода. Однако, применяя частотно-регулируемый привод, мы сталкиваемся с проблемой обеспечения требуемого диапазона регулирования скорости подачи в механизмах перемещения, а также распределения нагрузки между приводами.
Анализ исследований и публикаций.
Исследования показали, что привод на базе электродвигателя постоянного тока обеспечивает более высокий диапазон регулирования скорости подачи механизма перемещения при одинаковой мощности, чем в частотно-регулируемом приводе. В литературе не обнаружено способов повышения диапазона в частотно-регулируемых двухдвижительных приводах механизма перемещения очистных комбайнов.
Постановка задачи.
Выполнить анализ возможного диапазона регулирования в двигателях постоянного и переменного тока.
Изложение материала и результаты.
В настоящее время в механизме перемещения очистного комбайна не решена проблема диапазона регулирования скорости. В качестве объектов сравнения приняты частотно-регулируемый привод и привод на базе электродвигателя постоянного тока.
На рисунке 1 приведена зависимость устойчивых и критических моментов для двигателей 30, 45, 60 кВт.

Рисунок 1 - Диапазон регулирования скорости частотно-регулируемого привода 30 кВт, 45 кВт, 60 кВт.
Устойчивый момент определялся из:

где Мк(a) = 2Мкд(a) - критический момент двухдвигательного привода;
Мкд(a) - критический момент одного электродвигателя;
a = f1 / f1ном - относительная частота напряжения (тока) статора;
f1 - частота напряжения (тока) статора; f1ном = 50 Гц.
Критический момент рассчитан по:

где U1нф - фактическое значение напряжения обмотки двигателя при f1ном = 50 Гц ;
m1=3 - число фаз статора;
w1ном - номинальное значение угловой частоты вращения;
y= U1/U1нф - относительное напряжение на статоре;
U1 - напряжение на статоре;
t1 = x1/x0 - коэффициент рассеяния статора;
t2 = x'2/x0 - коэффициент рассеяния ротора;
t = t1+ t2 + t1t2 - общий коэффициент рассеяния;
b=r1(1 + t2); c = x0t; d = r1/x0; e = (1 + t1) - коэффициенты, зависящие от параметров схемы замещения;
r1, x1 - активное и индуктивное сопротивление статора;
x'2 - приведенное индуктивное сопротивление ротора;
x0 - реактивное сопротивление контура намагничивания.
Схема замещения приведена на рисунке 2.

Параметры Г-образной схемы замещения двигателей ЭКВ4-30-6-2, ЭКВ4-45-6-2, ЭКВ4-60-6-2 приведены в таблице.
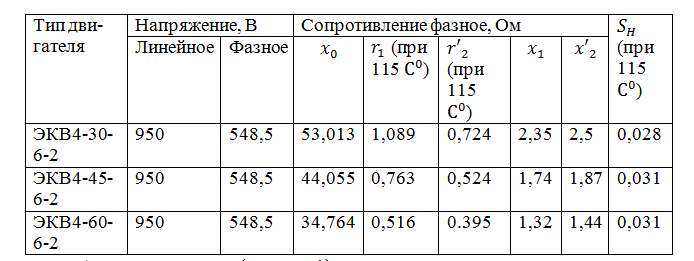
Анализ показывает (рисунок 1), что при применении двигателя мощностью 30 кВт (требуемого для обеспечения необходимого тягового усилия) диапазон составляет 14 - 64 Гц (4,8-отношение макс. частоты к мин.), что недостаточно (например: для комбайнов типа УКД400 диапазон регулирования должен находится в пределах 0,5-10(12) м/мин). В то же время, при применении двигателя мощностью 60 кВт для обеспечения того же тягового усилия диапазон может быть увеличен со 128 до 3 Гц (43), в 9 раз увеличивается, при этом мощность будет завышена в 2 раза, что повлечет за собой увеличение размеров редуктора, привода и машины в целом.
На рисунке 3 приведены механические характеристики привода на базе двигателя постоянного тока.
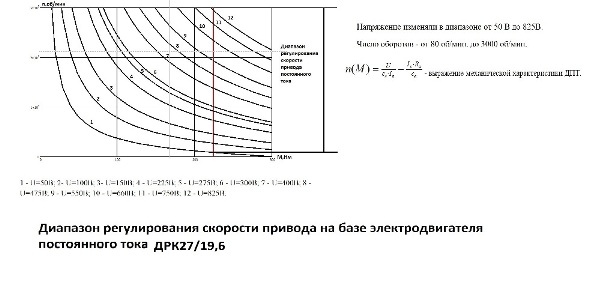
Рисунок 3 - Диапазон регулирования скорости привода на базе электродвига-теля постоянного тока ДРК27/19,6.
1 - U=50В; 2- U=100B; 3- U=150B; 4 - U=225B; 5 - U=275B; 6 - U=300B; 7 - U=400B; 8 - U=475B; 9 - U=550B; 10 - U=660B; 11 - U=750B; 12 - U=825B.
Д1 - Диапазон регулирования скорости двигателя постоянного тока относи-тельно своего номинального момента.
Д2 - Диапазон регулирования скорости относительно номинального момента требуемого тягового усилия комбайна УКД-400.
Напряжение изменяли в диапазоне от 50 В до 825В. Число оборотов - от 80 об/мин. до 3000 об/мин.
Механические характеристики построены согласно:
Для двигателей последовательного возбуждения a=0,75.

М = сМФIя – ток якоря нашли исходя из этой формулы. Нанесем линии номинальных моментов двигателя постоянного тока (Мн) и момента исходя из необходимых тяговых усилий для комбайна УКД-400 (Мнту). При этом диапазон регулирования будет составлять от 70 об/мин - 2150 об/мин (31 – отношение максимальной частоты вращения к минимальной). Диапазон питающего напряжения составит от 75В – до 825В.
Из рисунка 3 видно, что в двигателе постоянного тока диапазон регули-рования выше, чем в частотно-регулируемом приводе при одинаковых мощностях. Однако известно, что электродвигатели постоянного тока имеют большие габариты и более сложны в обслуживании при эксплуатации.
Выводы и направление дальнейших исследований.
При одинаковых мощностях двигателей привод на базе постоянного тока имеют существенно выше диапазон регулирования скорости, чем в частотно-регулируемом приводе, но относительно момента требуемого для необходимых тяговых усилий для комбайна УКД-400, диапазон регулирования скорости несколько снижается. Как показано выше, в двигателях переменного тока диапазон регулирования можно повысить с помощью увеличения мощности двигателя. В дальнейшем необходимо выполнить анализ габаритно-массовых показателей электрических приводов перемещения очистных комбайнов, а так же распределения нагрузки между ними.
Список источников
1. В.П.Кондрахин, В.В.Косарев, Н.И.Стадник, А.В. Мезников - устойчивый момент и диапазон частотного регулирования двухдвигательного привода механизма перемещения очистного комбайна.
2. Кондрахин В.П., Косарев В.В., Стадник Н.И.- Электрические механизмы перемещения очистных комбайнов, 2010.
3. Костенко М.П., Пиотровский Л.М. - Электрические машины том 2, 1972.
4. Н.И Стадник, А.В. Мезников, И.Ю. Руденко, В.П. Кондрахин - Методика формирования закона частотного регулирования привода перемещения очистных комбайнов.
5. 2-я региональная студенческая конференция подъемно-транспортное оборудование и логистика. 18-19 апреля 2012г.