Аннотация
Н.И Стадник, д-р. техн. наук, первый заместитель директора по научной работе, А.В. Мезников, заведующий отделом создания электропривода горных машин, средств автоматизации и исследования режимов работы ГШО, И.Ю. Руденко, ведущий конструктор, ГП "Донгипроуглемаш", В.П. Кондрахин, д-р. техн. наук, профессор, ДонНТУ, г. Донецк, Украина, Методика формирования закона частотного регулирования привода перемещения очистных комбайнов. Представлен основанный на принципах мехатроники подход к формированию закона частотного регулирования привода подачи современных очистных комбайнов, обеспечивающий диапазон регулирования, тяговые характеристики и перегрузочную способность.
Проблема и ее связь с научными и практическими задачами.
Создание горно-шахтного оборудования с высокими функционально-параметрическими характеристиками невозможно без применения взаимосвязанных механических, гидравлических и информационных компонент, что обусловливает задачу объединения в единое целое объектов различной физической природы, основанных на отличных принципах функционирования.
Для решения подобных задач целесообразно использование мехатронного подхода [1], находящего все более широкое применение в практике современного проектирования горных машин.
Анализ исследований и публикаций.
Несомненно, мехатронным объектом является частотно-регулируемый привод перемещения очистных комбайнов [1], включающий два идентичных узла привода подачи (см. рис. 1), получающих питание от - преобразователя электрического ПЭЭ и состоящих из электромеханического преобразователя (асинхронный электродвигатель), механического преобразователя (редуктор), механического преобразователя (трехэлементный или двухэлементный движитель).
Постановка задачи.
Цель работы - сформулировать закон частотного регулирования привода перемещения очистного комбайна с учетом взаимодействия электронной (модуль ПЭЭ), электромеханической (модули ) и механических (модули и ) (см. рис. 1) компонент. В качестве примера представлено исследование системы подачи комбайна УКД400, предназначенного для механизированной выемки угля в составе очистных комплексов в забоях пологих и наклонных пластов мощностью до 1,5 м.
Изложение материала и результаты.
Основными параметрами привода подачи являются: диапазон регулирования скорости, необходимые тяговые усилия, а также перегрузочная способность, что существенно в связи со значительной динамикой нагрузки.
Требования к диапазону регулирования скорости очистного комбайна связано с особенностями технологии его работы. Из опыта эксплуатации следует, что минимальное значение скорости подачи комбайна, в частности, при самозарубке в пласт способом косых заездов, составляет 0,5 м/мин. Максимальное значение указанной величины при рациональном согласовании параметров очистного комбайна с прочим горно-шахтным оборудованием ограничено скоростными возможностями перемещения машиниста и крепления забоя. Предельная скорость перемещения горнорабочего за комбайном составляет 7 м/мин для тонких пластов, являющихся областью применения комбайна УКД400 [2]. Максимальная скорость крепления составляет 8 м/мин (для крепей с автоматизированным управлением). Принимая во внимание перспективы развития комбайновой выемки, можно с некоторым запасом оценить требуемый диапазон изменения скорости подачи в пределах от 0,5 до 12 м/мин, то есть полный диапазон регулирования 24:1 (для условий тонких пластов).
Такой широкий диапазон при регулировании вниз от номинальной частоты 50 Гц не может быть реализован в разомкнутых системах частотного регулирования скорости. Поэтому следует использовать двухзонное регулирование скорости, в том числе и вверх от номинальной частоты.
Расчеты показывают, что для комбайна УКД400 пределы изменения для всего диапазона условий эксплуатации: в режиме выемки - от 100 до 400 кН (при скорости подачи от 0,5 до 12 м/мин), в режиме перегона (независимо от величины скорости подачи) - от 90 до 250 кН [4]. Для конкретных условий (угол наклона пласта, сопротивляемость резанию) увеличение необходимого статического тягового усилия подачи при росте скорости перемещения от минимальной до максимальной сравнительно невелико (максимально до 30%).
Закон частотного управления из условия сохранения перегрузочной способности при синусоидальной форме напряжения для идеализированного двигателя (активное сопротивление статора =0, ненасыщенная магнитная цепь двигателя, принудительное охлаждение) установлен М.П. Костенко и записывается следующим образом:
Преимущество закона заключается в его простоте, недостатком является невозможность обеспечения перегрузочной способности в широком диапазоне регулирования скорости при постоянном моменте нагрузки из-за влияния падения напряжения на активном сопротивлении статора [5].
При использовании закона частотное регулирование производится в зоне ниже номинальной частоты (относительная частота меньше 1). Для случая, когда a>1 , регулирование обычно осуществляется при неизменном напряжении U=const, что позволяет расширить диапазон регулирования при той же мощности преобразователя. При этом в соответствии с законом (2) момент, который двигатель может развивать в этом режиме, уменьшается обратно пропорционально квадрату частоты (и, соответственно, в данном случае - скорости подачи) [8].
Механические характеристики двигателя подачи, построенные для двух упомянутых выше законов регулирования напряжения от частоты, приведены на рис. 1. На эффективность "корректировки" закона пропорционального регулирования указывают значения (перегрузочной способности по отношению к номинальному моменту) для естественной и искусственной характеристик, равные 2,1; 1,5; 0,911 и 2,6; 2,4; и 1,7 для значений частоты, соответственно, 30, 15 и 7,5 Гц. При этом в соответствии с техническими условиями на двигатель значение данного показателя составляет 2,6 (для номинальной частоты 50 Гц).
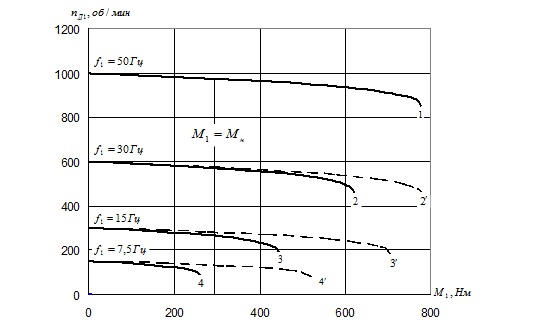
Рис. 1. Механические характеристики двигателя ЭКВ4-30-6-02 при частотном регулировании: 1, 2, 3, 4 - для закона регулирования ; 2', 3', 4' - для закона регулирования, обеспечивающего увеличение перегрузочной способности двигателя.
Из рис. 2, на котором приведены тягово-скоростные характеристики комбайна УКД400 (для a=10°), видно, что максимальная скорость подачи составляет: в режиме выемки - от 9,0 до 11,0 м/мин в зависимости от сопротивляемости резанию, в режиме перегона - не менее 12,0 м/мин. При этом перегрузочная способность в относительных единицах (на графике - отн. ед.) при сопротивляемости резанию 360 Н/мм - не менее 1,5.

Рис. 2. Зависимости от скорости подачи тяговых усилий в режиме перегона, выемки,(при сопротивляемости резанию 120, 240 и 360 Н/мм), усилия, развиваемого двигателями подачи, а также реализуемой перегрузочной способности (при сопротивляемости резанию 360 Н/мм).
Таким образом, предложенный закон двухзонного регулирования напряжения в зависимости от частоты позволяет обеспечить необходимые тяговые усилия, диапазон изменения скорости подачи и перегрузочную способность.
Приведенные выше расчеты не учитывают ряд факторов, которые могут оказывать определенное влияние на выбор закона частотного регулирования: несинусоидальность напряжения преобразователя, наличие явлений вытеснения тока в стержнях ротора и насыщения магнитопровода, ограничение диапазона регулирования статизмом, который может быть допущен при малой угловой скорости, особенности нагрева электродвигателя с водяным охлаждением при частотном управлении и др. Кроме того, оптимальный закон частотного регулирования зависит от горно-технических условий эксплуатации конкретной машины рассматриваемого типа. Очевидно, что закон регулирования (в отличие от остальных параметров механизма перемещения) можно легко изменять в зависимости от особенностей условий эксплуатации. Поэтому окончательный вид закона регулирования следует отрабатывать экспериментально на натурных образцах механизмов перемещения на специальных нагрузочных стендах с учетом конкретных требований к тяговым усилиям и диапазону регулирования скорости, диктуемых условиями эксплуатации в конкретном очистном забое.
Выводы и направление дальнейших исследований.
Приведенный в статье подход к корректировке закона пропорционального регулирования напряжения от частоты для привода подачи очистного комбайна на основе принципов мехатроники позволяет, исходя из требуемых диапазона регулирования и тяговых усилий, сформулировать зависимость напряжения на выходе преобразователя от частоты, принимая во внимание результаты расчета статических механических характеристик и реализуемой перегрузочной способности электропривода. Окончательный вид закона регулирования следует отрабатывать экспериментально на натурных образцах механизмов перемещения на специальных нагрузочных стендах.
Список источников
1. Стадник Н.И., Сергеев А.В., Кондрахин В.П. Мехатроника в угольном машиностроении/Горное оборудование и электромеханика -2007.-№ 4 - С. 20-29.
2. Сургай Н.С., Виноградов В.В., Кияшко Ю.И. Производительность очистных комплексов нового технического уровня и пути ее повышения/Уголь Украины- 2001. - № 6 - С. 3-5.
3. Изделия угольного машиностроения. Комбайны очистные. Методика выбора параметров и расчета сил резания и подачи на исполнительных органах (взамен ОСТ12.44.258-84): КД12.10.040-99.- [Введен с 2000-01-01].-Донецк: 1999. - 75с.
4. Оценка и анализ силовых и энергетических параметров очистного комбайна УКД300 с частотным регулированием скорости подачи: отчёт о НИР. - ГП "Донгипроуглемаш", 2002. - 58 с. - Инв. № А/6370.
5. Решение научно-технических проблем при создании и внедрении современного горно-шахтного оборудования: сб. науч. тр. ГП "Донгипророуглемаш" под общей редакцией В.В. Косарева, Н.И. Стадника - Донецк: Астро, 2008. -800 с.