Система управления БПЛА для полета на малых высотахАвтор: Т. В Белоцерковский Источник: faks.kpi.ua ВступлениеПолеты на малой высоте усложняются повышенной турбулентностью атмосферы и неспособностью отслеживать изменение высоты рельефа (на малых БПЛА измеритель относительной высоты, как правило, отсутствует либо применяется лишь для посадки). Как следствие приходится увеличивать высоту автоматического полета а соответственно снижать эффективность выполнения поставленных задач. Постановка задачиЦелью работы было построение системы управления малого беспилотного аппарата для распыления энтомологического препарата трихограммы. Такое целевое назначение требует обеспечения полета на постоянной высоте 5–7 м над поверхностью земли (чтоб мелкодисперсная трихограмма не разносилась далеко ветром), а также построения маршрута для оптимального покрытия всей площади поля полосой распыления и следование по этому маршруту. Общая структура системы управления представлена на рис. 1 
Рисунок 1 – Структура БПЛА с системой управления Блок датчиков включает инерциальный модуль, трехосный магнитометр, приемник спутниковых навигационных сигналов, приемники статического и динамического давления, ультразвуковой высотомер. В качестве бортового вычислителя использован одноплатный компьютер. Хоть он и имеет несколько большие габариты и потребление питания, нежели более простые микропроцессорные системы, однако гибкость использования и запас вычислительной мощности позволяет значительно ускорить исследовательский процесс. Стабилизация относительной высоты полета выполняется по данным с ультразвукового высотомера и информации о текущей вертикальной перегрузке. Выбор именно ультразвукового высотомера обусловлен его малыми габаритами малым потребление энергии, а также небольшой стоимостью. Проблема небольшого диапазона измерения решается комплексированием с сигналом спутниковой навигационной системы и барометрическим высотомером (при выходе за диапазон измерения ультразвукового высотомера самолет производит плавное снижения пока высотомер не увидит землю). Так как рельеф подстилающей поверхности неизвестен, из данных о вертикальной перегрузке отнимается расчетное значение перегрузки которое возникает при отработке неровностей рельефа. Это позволит выделить перегрузку вызванную внешними возмущениями и парировать их. Также к сигналу перегрузки добавляется оцененное изменение массы аппарата (расход топлива и рабочего вещества). Для стабилизации бокового движения рассчитывается отклонение от лини заданного пути (ЛЗП) и задается соответствующий угол крена для возврата на ЛЗП. Так как акустический высотомер имеет ограниченную по углу зону стабильной работы, если необходимый крен больше десяти градусов, то выполняется плоский разворот через канал рыскания. Структура системы управления в режиме стабилизации высоты полета и ЛЗП приведена на рис. 2. При выполнении поворота стабилизация ЛЗП отключается и создается крен заданного радиуса разворота. Поворот продолжается пока не будет достигнута конечная точка поворота, или пока курс не сравняется с курсом следующей ЛЗП. Построение маршрута подразумевает при известных границах поля построение точек полета таких, чтоб полоса распыления равномерно покрыла всю поверхность поля. Все расчеты должны производится на борту, что упростит использование системы и освободит от необходимости наземного пульта управления. Оптимальным маршрутом будет спиральная траектория. Основное ее преимущество – минимальный угол поворотов, что позволяет, в сравнении с другими траекториями, увеличить скорость и точность полета. 
Рисунок 2 – Структурная схема системы управления БПЛА в режиме стабилизации заданной высоты и ЛЗШ 
Рисунок 3 – Расчет отклонения от ЛЗП, идентификация прохождения точек 
Рисунок 4 – Оценка действительного курса На рис. 5 приведен результат работы алгоритма автоматического построения маршрута для ширины распыления 5 м и произвольной формы поля. По окончании прохода маршрута – возврат в точку старта. 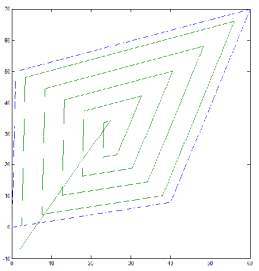
Рисунок 5 – Автоматически построенный маршрут для покрытия всей площади поля Математическое моделированиеДля отображения поведения самолета построена нелинейная модель БПЛА в пакете Matlab Simulink. На Рис. 6,7 показаны результаты работы системы управления по отработке заданной относительной высоты полета 5 м при скорости самолета 24 м/с, турбулентном ветре до 1м/с (нижняя линия – рельеф, верхняя траектория полета). 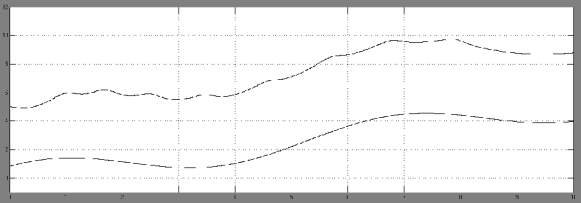
Рисунок 6 – Стабилизация заданной относительной высоты при неизвестном пологом рельефе 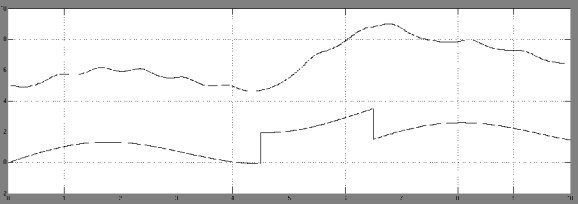
Рисунок 7 – Стабилизация заданной относительной высоты при неизвестном пологом рельефе при наличии ступенчатой возвышенности При возмущающем турбулентном ветре до 1м/с точность стабилизации высоты составляет 0,5 м, что достаточно для полета над пологим неизвестным рельефом на высоте 5–7 м над поверхностью земли, необходимой для распыления мелкодисперсных веществ. Список использованной литературы
|
![]()