УДК 62-533.6
Кузнецов Д. Н., Дьяченко А. А., Чупис Д. А.
Донецкий национальный технический университет Донецкий национальный университет
НАСТРОЙКА ОПТИМАЛЬНОГО РЕГУЛЯТОРА ТЕМПЕРАТУРЫ ВОЗДУШНОГО ПОТОКА АЭРОДИНАМИЧЕСКОГО СТЕНДА АДС-200/250
Аннотация Кузнецов Д. Н., Дьяченко А. А., Чупис Д. А. Настройка оптимального регулятора температуры воздушного потока аэродинамического стенда АДС-200/250.В статье решается задача экспериментального определения оптимальных настроек цифрового ПИД-регулятора температуры воздушного потока в составе электронной системы аэродинамического стенда АДС-200/250 при различных скоростях потока. Предложена методика расчета оптимальных настроек регулятора и приведены результаты натурных испытаний.
Ключевые слова: настройка, регулятор температуры, аэродинамический стенд, испытания.
Актуальность.
В настоящее время задача измерения скорости воздушного потока в системах учета расхода, экологического мониторинга и в системах автоматического управления вентиляций предъявляет все более высокие и жесткие требования к метрологическим и эксплуатационным характеристикам измерителей скорости воздуха. Основными требованиями являются безинерционность измерений, широкий динамический диапазон и высокая точность во всем диапазоне измеряемых скоростей.
Как правило, измерители
скорости
воздуха проходят метрологическую аттестацию в аэродинамических трубах.
Аэродинамическая труба представляет собой физический прибор,
позволяющий получить в одном из его элементов, а именно
в
рабочей части
,
где располагается исследуемое
тело, равномерный прямолинейный установившийся поток воздуха
определенной скорости [1,2].
Особенностью метрологической аттестации термоанемометрических
преобразователей скорости (ТА)
является необходимость их предварительной градуировки при различных
температурах воздушного потока [3]. Причем точность установки
и
поддержания температуры должна быть не хуже долей градуса.
Эффективность градуировки термоанемометров во многом зависит от
качества настройки регулятора температуры. Таким образом, для
обеспечения эффективной градуировки термоанемометров необходимо решить
актуальную задачу оптимальной настройки регулятора температуры
аэродинамического стенда [4, 5].
Постановка задачи. На этапе предварительных экспериментов было установлено, что параметры контура управления температурой аэродинамического стенда сильно зависят от скорости потока в трубе. Т. е. коэффициенты оптимального регулятора температуры являются функциями скорости потока. Поэтому для обеспечения оптимальных настроек регулятора температуры в широком диапазоне рабочих скоростей потока необходимо решить следующие основные задачи:
- Экспериментальное определений оптимальных параметров регулятора при различных скоростях и температурах воздушного потока;
- Подбор вида функций для аппроксимации экспериментальных данных.
- Реализация цифрового ПИД-регулятора и экспериментальная проверка качества его работы.
Решение
поставленных задач. На
рисунке 1
приведена функциональная
схема электронной
системы аэродинамического стенда АДС-200/250, установленного в СКТБ
Турбулентность
ДонНУ. Данная система работает в
связке с персональным компьютером и обеспечивает управление скоростью и
температурой воздушного потока в аэродинамической трубе, а также
регистрацию измерительных данных от образцовых и градуируемых средств
скорости потока.
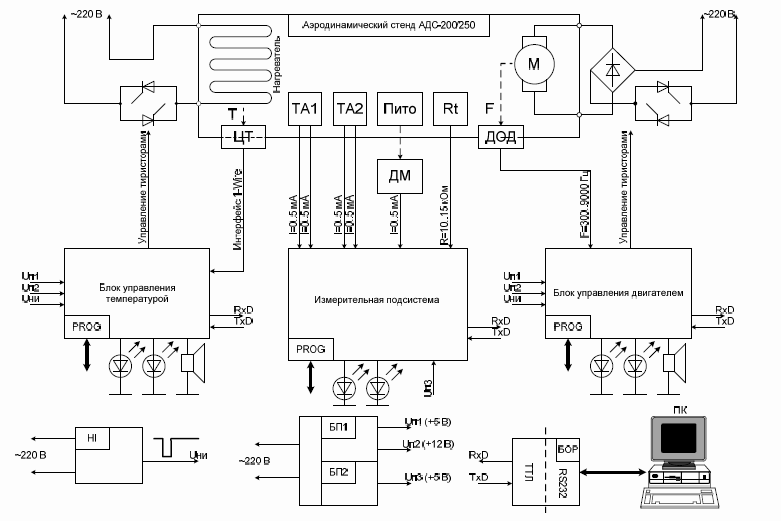
Рисунок 1 — Электронная система аэродинамического стенда АДС-200/250
Контур
управления температурой (КУТ) воздушного потока является
частью
рассматриваемой электронной системы. В состав КУТ входят: спиральный
нагреватель потока мощностью 2 кВт,
цифровой термометр ЦТ DS18B20 c
однопроводным интерфейсом обмена данными 1-Wire
,
микропроцессорный блок управления температурой на базе 8-разрядного
микроконтроллера ATmega8 и тиристорный регулятор мощности с
фазоимпульсным управлением.
В блоке управления температурой реализован алгоритм цифрового ПИД-регулятора, структура которого представлена на рис. 2. Непрерывный закон ПИД-регулятора имеет вид
 .
(1)
.
(1)
где e = Т –Тзад — ошибка регулирования; Кп, Ки и Кд — коэффициенты пропорционального, интегрирующего и дифференцирующего звеньев соответственно.
Запишем уравнение (1) в конечных разностях, путем замены t = kTk и получим алгоритм цифрового ПИД-регулятора
 .
(2)
.
(2)
где k = 1, 2, 3… — номер периода квантования; Тk — период квантования.
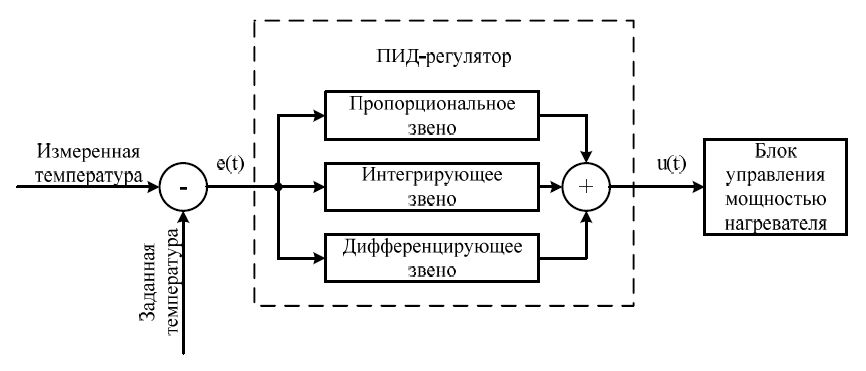
Рисунок 2 — Структура ПИД-регулятора блока управления температурой
Настройка регулятора. Для настройки цифрового ПИД-регулятора температуры был использован экспериментальный метод незатухающих колебаний (Никольса-Циглера) [6]. Экспериментальный метод настройки регуляторов не требуют знания математической модели объекта. Однако предполагается, что система смонтирована и может быть запущена в работу, а также существует возможность изменения настроек регулятора. Таким образом, можно проводить некоторые эксперименты по анализу влияния изменения настроек на динамику системы.
Сущность метода незатухающих колебаний заключается в следующем. В работающей системе выключаются интегральная и дифференциальная составляющие регулятора, т.е. система переводится в П-закон регулирования. Путем последовательного увеличения коэффициента усиления Кп с одновременной подачей небольшого скачкообразного сигнала задания добиваются возникновения в системе незатухающих колебаний с периодом Ткр. Это соответствует выведению системы на границу колебательной устойчивости. При возникновении данного режима работы фиксируются значения критического коэффициента усиления регулятора Ккр и периода критических колебаний в системе Ткр. При появлении критических колебаний ни одна переменная системы не должна выходить на уровень ограничения. По значениям Ккр и Ткр рассчитываются настройки ПИД регулятора:
Kn = 0,6Kкр; Tu = Tкр / 2; Tд = Ткр / 8. (3)
В результате эксперимента были определены значения граничного коэффициента Ккр и периода критических колебаний Ткр при скоростях потока от 2,5 до 20 м/с и температурах от 25 до 45 0С. Типовой вид графика температуры потока в режиме возникновения незатухающих колебаний представлен на рисунке 3. Результаты определения Ккр и Ткр приведены в таблицах 1 и 2. Скорость потока в таблицах характеризуется частотой импульсов датчика оборотов двигателя F. Минимальной скорости 2,5 м/с соответствует F = 500 имп/с, максимальной скорости 20 м/с — F = 4000 имп/с.
Из результатов следует, что Ккр и Ткр сильно зависят от скорости потока и практически инвариантны к изменениям его температуры. Графики зависимостей Ккр (F) и Ткр (F) представлены на рисунках 4 и 5 соответственно.
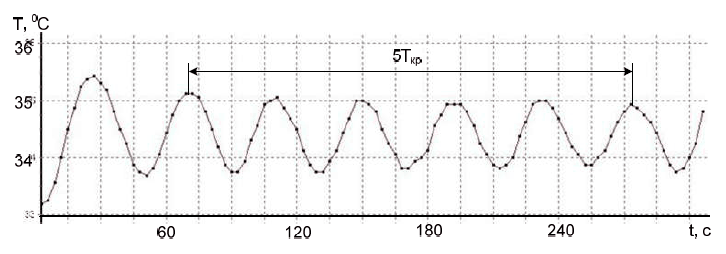
Рисунок 3 — Типовой вид графика температуры потока в режиме незатухающих колебаний
Таблица 1 — Период критических колебаний Ткр, с при различных скоростях и температурах
| Т = 25 0С | Т = 35 0С | Т = 45 0С | |
| F = 500 имп/с | 67 | 65 | 63 |
| F = 1000 имп/с | 40 | 41 | 42 |
| F = 2000 имп/с | 30 | 30 | 30 |
| F = 4000 имп/с | 22 | 21 | 21 |
Таблица 2 — Критический коэффициент передачи Ккр при различных скоростях потока
| F, имп/с | Kп кр |
| 500 | 300 |
| 1000 | 500 |
| 2000 | 700 |
| 4000 | 900 |
Аппроксимация
экспериментальной зависимости Ткр (F)
выполнялась степенной функцией вида
Коэффициенты А и n были определены средствами программы Excel путем добавления на график линии тренда и ее уравнения. В итоге получили: А = 1733 и n = -0,534. Погрешность аппроксимации при этом не превышает 5 %. Аналогично для зависимости Ккр (F) была подобрана логарифмическая аппроксимирующая функция
Ккр = В ln(F) - C = 2,885 ln(F) - 15, (5)
которая обеспечивает погрешность аппроксимации не более 2 %.
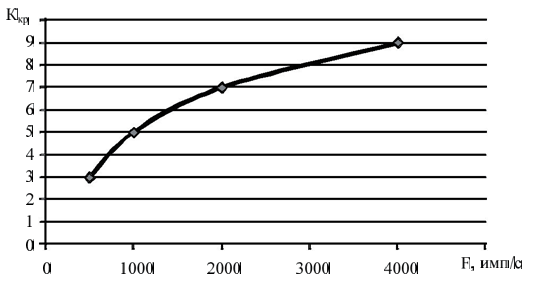
Рисунок 4 — Зависимость критического коэффициента усиления Ккр от скорости потока
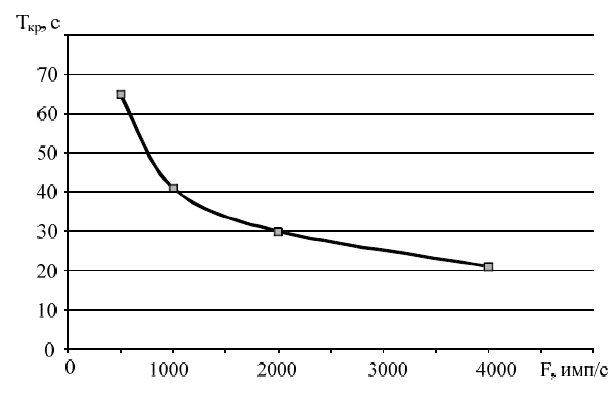
Рисунок 5 — Зависимость периода критических колебаний Ткр от скорости потока
Зависимости (4) и (5) были реализованы на программном уровне в блоке управления температурой потока электронной системы аэродинамического стенда. Алгоритм работы регулятора температуры предполагает, что при каждом изменении уставки по скорости потока программа, используя зависимости (3 - 5), определяет оптимальные настройки цифрового ПИД-регулятора, чем обеспечивается высокое качество регулирования и, в конечном счете, высокая эффективность градуировки термоанемометров.
На рисунках 6 - 8 представлены результаты испытаний спроектированного регулятора температуры потока в составе электронной системы аэродинамического стенда АДС-200/250. При испытаниях фиксировалась реакция регулятора на скачкообразное изменение скорости потока (рис. 6), изменение уставки по температуре в сторону ее увеличения (рис. 7) и уменьшения (рис. 8). Из результатов испытаний следует, что при различных переходных режимах в контуре управления температурой потока рассчитанный и настроенный по предложенной методике цифровой ПИД-регулятор обеспечивает закон регулирования близкий к оптимальному. Время установления заданной температуры с допустимой ошибкой регулирования 0,2 0С составляет порядка 120 секунд.
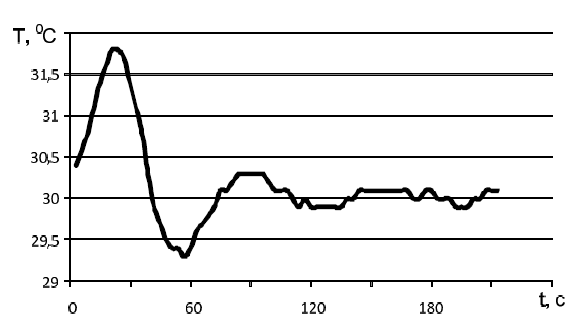
Рисунок 6 — График переходного процесса температуры потока при изменении скорости потока с 2,5 до 10 м/с
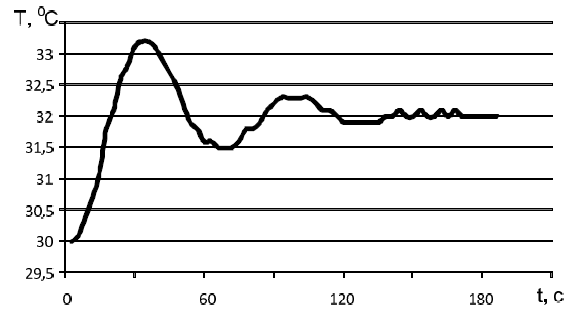
Рисунок 7 — График переходного процесса температуры потока при изменении уставки температуры с 30 0С до 320С при скорости потока 10 м/с
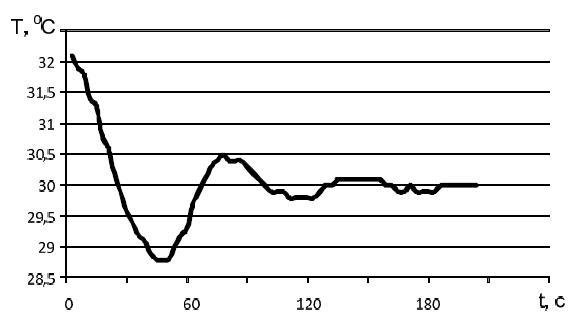
Рисунок 8 — График переходного процесса температуры потока при изменении уставки температуры с 32 0Сдо 30 0С при скорости потока 10 м/с
Полученные результаты позволяют оценить полное время градуировки термоанемометров. Например, при градуировке ТА на трех температурах с десятью точками по скорости имеем общее число точек градуировки 3 • 10 = 30, и полное время градуировки 30 • 120 = 3600 секунд или 1 час.
Выводы.
1. Предложенная методика расчета и реализации цифрового ПИД-регулятора температуры воздушного потока аэродинамического стенда позволяет учесть зависимость коэффициентов регулятора от скорости потока и обеспечивает оптимальные настройки в широком диапазоне скоростей потока.
2. Разработанный регулятор температуры является адаптивным к изменению скорости потока, что обеспечивает повышение эффективности градуировки термоанемометров, за счет сокращения времени установления температуры воздушного потока и повышения точности ее поддержания.
Литература
1. Повх И Л. Аэродинамический эксперимент в машиностроении / Повх И. Л.. — Л.: Машиностроение, 1974, — 480 с.
2.
Повх И. Л. Техническая
гидромеханика. 2-е изд., доп. /
Повх И. Л.. —
Л.:
Машиностроение, 1976. — 504 с.
3. Ярин Л. П. Термоанемометрия газовых потоков /
Ярин Л. П., Генкин А. Л.,
Кукес В. И.. — Л.: Машиностроение,
Ленингр.
отд-ние, 1983, — 198 с.
4. Зори А. А. Повышение эффективности градуировки первичных измерительных преобразователей термоанемометров / Зори А. А., Кузнецов Д. Н. // Зб. наук. пр. ДонДТУ. Серiя: Обчислювальна технiка та автоматизацiя. — 2001. — Вип. 25. — c. 183-189.
5. Зори А. А., Кузнецов Д. Н. Методы и программно-аппаратные средства автоматизированной системы градуировки первичных измерительных преобразователей термоанемометров / Зори А. А., Кузнецов Д. Н. // Известия ТРТУ. Тематический выпуск: Материалы Всероссийской научно-технической конференции с международным участием «Компьютерные технологии в инженерной и управленч. деятельности». Таганрог: ТРТУ. — 2002. — № 2 (25). — c. 148-150.
6. Ким Д. П. Теория автоматического управления. Линейные системы: учеб. пособие / Ким Д. П.. — М.: ФИЗМАТЛИТ,2003. — Т.2. — 288 с.
Надійшла до редакції: 15.02.2011
Рекомендовано до друку: д-р техн. наук, проф. Зорі А. А.
Abstract
Kuznetsov D.,
Dyachenko A., Chupis D. Optimum
air flow temperature regulator adjustment for the aerodynamic stand
ADS-200/250. In this paper the problem of experimental optimum
adjustments defining for a digital air flow temperature PID-controller
in the aerodynamic stand ADS-200/250 is solved for various air flow
velocities. The technique of PID-controller optimum adjustments
calculation is proposed and experimental results are given.
Keywords:
adjustment, temperature controller, aerodynamic stand, tastings.
Анотація
Кузнецов Д. М., Дьяченко А. А.,
Чупіс Д. А.
Налаштування оптимального регулятора температури повітряного потоку
аеродинамічного стенду АДС-200/250. У статті вирішується задача
експериментального визначення оптимальних настройок цифрового
ПІД-регулятора температури повітряного потоку в складі електронної
системи аеродинамічного стенду АДС-200/250 при різних швидкостях
потоку. Запропоновано методику розрахунку оптимальних параметрів
регулятора та наведені результати натурних випробувань. Ключові слова:
налаштування, регулятор температури, аеродинамічний стенд, випробування.
© Кузнецов Д. Н., Дьяченко А. А., Чупис Д. А., 2011