где
Весовые коэффициенты в значениях формулы (1) принимаются на основе анализа приоритетных задач в ГТК. Поскольку основная цель НС является реализация необходимых законов технологического регулирования, коэффициент ΔP∑ (t) имеет максимальную массу, равную единице. Проблема экономии энергии может быть решена путем поддержания минимальной общей потери мощности ΔP∑ (t) которая является сопутствующей проблемой в разработке необходимых технологических условий регулирования в соответствии с требуемой точностью для поддержания параметров. Таким образом, весовой коэффициент мощности считается равным Kp (t).
Принципиально задача оптимизации (1) может быть решена с особой AСУ, которая использует принцип прямого измерения производной критерия оптимальности dI/du где u – управляющий параметр. В развитой АСУ ГТК контролируемым параметром является частота f(t) сети питающего электрического двигателя насоса, напряжение U(t) подаваемого на электродвигатель. Оно меняется в соответствии с выбранным законом частотного регулирования U/f2=const.
Был разработан алгоритм экстремального функционирования АСУ. Это позволяет контролировать режимы НС, находя значение переменной f(t) соответствующей минимальному критерию оптимальности. Это подтверждается результатами моделирования, приведенных на рис. 1, где: Q'PS=QPS/Qn – выходная мощность; ΔP'∑cur=ΔP∑cur/ΔP∑n – общие потери в ГТК; ΔP∑n= 309 kW; P'C=PC/PC.max – максимальное гидродинамическое сопротивление в трубопроводе потребителя; PC.max=3432,4 s2/m2. В связи с переменным потреблением воды в течение долгого времени в АСУ ГТК промежуток времени от 500 до 2300 соответствует требуемому давлению H'c.req=0,8 пока H'c.req=0,3 сохраняется в течение времени от от 2300 до 500
Переменная кривая потребления воды моделируется формирования сигнала на трубопроводе потребителя:
Анализ крайней эксплуатации АСУ ГТК, принимающих реальные графики потребления воды во внимание показали, что стабилизация давление в системе обеспечивается с точностью (0,2÷1,6%)Hc.req в то время как минимизация потерь электроэнергии во всех звеньях технологической системы осуществляется путем изменения единицы частоты вращения насоса.
Рисунок 1 – Кривые изменения относительных параметров HTC на крайнем AСУ в момент расхода воды в день Q(t) Выводы. Разработанная крайняя система автоматического управления гидротранспортной комплекса позволяет свести к минимуму потребляемую мощность во всех звеньях технологической цепи при стабилизации давления в определённой точке трубопровода.
Режимы энергии из насосной станции контролируются путем нахождения частоты питающего напряжения, соответствующего минимальному критерию качества.
Предлагаемый подход может быть использован для прогнозирования потребления воды и электроэнергии, рассуждая схемы регулирования технологических параметров, оценки технического состояния оборудования, определение переходных режимов в гидротранспортном комплексе и т.д. 1. Лезнов Б. С. Энергосбережение и регулируемый привод в насосных и воздуходувных установках. – М.: Энергоатомиздат, 2006. – 360 с. 2. Петросов В. А. Устойчивость водоснабжения. – Харьков: Фактор, 2007. – 357 с. 3. Алексеева Ю. А., Коренькова Т. В. Система повышения эффективности насосного комплекса с энергонаблюдателем в контуре управления // Проблеми автоматизованого електроприводу. Теорія й практика. Тематичний випуск науково-технічного журналу «ЕЛЕКТРОІНФОРМ». – Львів: ЕКОінформ, 2009. – С. 377-381. 4. Алексеева Ю.А., Коренькова Т. В. Требования к построению системы энергоуправления насосным комплексом // Електромеханічні і енергозберігаючі системи. Щоквартальний науково-виробничий журнал. Кременчук: КДУ. – 2010. – Вип. 2/2010 (10). – С. 17–22. 5. Зайцев Г. Ф. Теория автоматического управления и регулирования. – К.: Вища школа, 1975. – 421 с. 6. Власов К. П. Специальный курс по теории автоматического управления. – Харьков.: Политехнический институт им. В. И. Ленина, 1974. – 198 с. 7. ДСправочник по теории автоматического управления. Под редакцией А.А. Красовского. – М.: Наука, 1987. – 712 с. 8. Алексеева Ю. А., Коренькова Т. В., Конох И.С. Экстремальная система автоматического управления гидротранспортным комплексом при стабилизации технологического параметра // Електромеханічні і енергозберігаючі системи. Щоквартальний науково-виробничий журнал. Кременчук: КДУ, 2010. Вип. 2/2010
(10). – С. 34–38. 9. Алексеева Ю. А., Коренькова Т.В., Сидоренко В. Н. Модель водопотребления в системе энергоуправления насосным комплексом // Електромеханічні і енергозберігаючі системи. Щоквартальний науково-виробничий журнал. Кременчук: КДПУ, 2008. – Вип. 3-4/2008 (4). – С. 54–58.
 Kp – весовой коэффициент мощности; Hc.req(t)., Hc.cur(t). – обязательное и текущее давление в потребительской сети; HPS.nom(t). – номинальное давление на выходе НС; ΔP∑nom=ΔPIM+ΔPTM+ΔPLM – номинальная мощность общих потерь; ΔPIM, ΔPTM, ΔPLM – потери мощности в асинхронном двигателе, насосе, трубопроводе; ΔP∑cur, ΔP∑nom – НС текущая и номинальная потеря мощности.
Kp – весовой коэффициент мощности; Hc.req(t)., Hc.cur(t). – обязательное и текущее давление в потребительской сети; HPS.nom(t). – номинальное давление на выходе НС; ΔP∑nom=ΔPIM+ΔPTM+ΔPLM – номинальная мощность общих потерь; ΔPIM, ΔPTM, ΔPLM – потери мощности в асинхронном двигателе, насосе, трубопроводе; ΔP∑cur, ΔP∑nom – НС текущая и номинальная потеря мощности.  где
где  – математическая зависимость многофакторной линейной регрессии; HS – статический напор трубопровода; A2 ,B2 ,C2 – коэффициенты аппроксимации зависимости от конструктивных особенностей насоса и определяется номинальными характеристиками насосов; К – постоянный модельный коэффициент; a1 - a5 – коэффициенты регрессии; pDP – давление на определённую точку, в часах; Kh – дневной часовой коэффициент; KDW – недельный часовой коэффициент; Т – температура воздуха; P0 – атмосферное давление, миллиметров ртутного столба [9].
– математическая зависимость многофакторной линейной регрессии; HS – статический напор трубопровода; A2 ,B2 ,C2 – коэффициенты аппроксимации зависимости от конструктивных особенностей насоса и определяется номинальными характеристиками насосов; К – постоянный модельный коэффициент; a1 - a5 – коэффициенты регрессии; pDP – давление на определённую точку, в часах; Kh – дневной часовой коэффициент; KDW – недельный часовой коэффициент; Т – температура воздуха; P0 – атмосферное давление, миллиметров ртутного столба [9].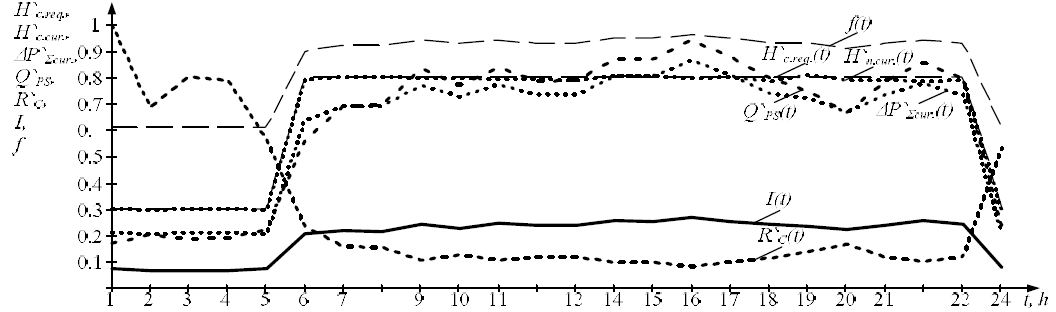
Список использованной литературы