Аннотация
Розглянуто математичні моделі транспортних потоків для різних схем організації дорожнього руху. Запропоновано алгоритми моделювання та обчислення критерію якості системи керування рухом на перехресті. Ці алгоритми реалізовано у вигляді прикладного програмного забезпечення.
Введение
В настоящее время рост числа автомобилей опережает темпы развития инфраструктуры, что приводит к задержкам и заторам в движении транспортных потоков по причине дефицита полос проезжих частей и отсутствия эффективных средств управления. Данная проблема стала особенно актуальна для Донецкой области в связи с подготовкой к «Евро – 2012» и утверждением генерального плана города Донецка до 2031 года. Для успешной реализации поставленных планов необходим инновационный подход к задаче управления транспортными и пешеходными потоками. Неотъемлемой составляющей в системном решении такой задачи является внедрение и совершенствование автоматизированных систем управления дорожным движением (АСУДД), основанных на новейших достижениях математической теории управления и информационных технологий. Согласно статьям [1, 2], ввод АСУДД только в г. Киеве позволил увеличить скорость движения на 30...40 % при снижении уровня загазованности в среднем на 40 %, шума — на 8...10 % и расхода горюче-смазочных материалов — на 8 %. Имеющиеся публикации также свидетельствуют о положительном эффекте внедрения следующих разработок в области автоматизации управления движением:
- Программно-аппаратный комплекс «КОМКОН АСУДД», НПП «Система + Сервис», Харьков;
- АСУДД «Агат», Минск, Новосибирск, Калининград;
- АСУДД „Старт”, АСУДД ООО «КБ СПЕЦТЕХНИКА», Москва;
- АСУДД-В, «Вереск», Красноярск;
- Аппаратно-программный комплекс реального времени для измерения характеристик транспортного потока „NeuroMatrix® TrafficMonitor-E”, НТЦ «Модуль», Москва;
- Компьютерная программа „Светофор”, Транспортная лаборатория Иркутского государственного технического университета, Иркутск;
- Компьютерная система управления движением в Лас Вегасе (LVACTS), США;
- Программный комплекс PTV Vison, Германия.
Показателен опыт Великобритании по внедрению систем активного управления дорожных движением (ATM – Active Traffic Management) на автомагистралях M25 и M42. Такой инновационный подход предполагает управление транспортным потоком с помощью автоматических ограничителей скорости, а также использование укрепленных обочин. При нормальных условиях на автомагистрали все электронные знаки будут пустыми и применяются все обычные правила движения. Если возникает затор или обнаружено ДТП, то датчики автоматически обнаружат снижение скорости потока, а компьютерная система управления вычислит наиболее подходящую скорость движения. Такое ограничение скорости появится на электронных знаках над соответствующими полосами движения. Инновации на автомагистрали M42 позволили снизить среднее время поездок более чем на четверть. Наряду с этим, общее потребление топлива сократилось на 4%, а выбросы вредных веществ в атмосферу упали на 10% [3].
Один из современных подходов к оптимальному управлению транспортными потоками описан в статье [4] на примере железнодорожных перевозок. В 2007 году Нидерландские железные дороги (Nederlandse Spoorwagen) ввели абсолютно новое расписание движения поездов, основанное на математическом моделировании и компьютерной оптимизации потоков. Общий годовой доход от введения нового расписания оценивается в 70 миллионов евро [4].
Постановка задачи
Детерминированные и стохастические модели транспортных потоков, соответствующие микро- и макроописаниям, приведены в работах [5-9].
Опишем подробно математическую модель сложного перекрестка и постановку задачи об оптимальной организации движения на этом перекрестке
Рассмотрим граф G, в котором каждая вершина соответствует некоторой полосе движения на одной из дорог. При этом все вершины могут быть разделены естественным образом на две доли: к первой доле будут относиться вершины, соответствующие полосам, в которых движение происходит к перекрестку, ко второй – те, что соответствуют полосам, по которым транспорт движется от перекрестка. Дуги будут определять допустимые движения на перекрестке. Так, если из полосы v первой доли транспортное средство имеет право (при определенных сигналах светофора) совершить маневр, после которого окажется в полосе w второй доли, то будем говорить о наличии дуги (v,w) в графе G. Будем считать, что все необходимые маневры (перестроение, опережение или обгон) были выполнены до того, как транспортное средство подъезжает к перекрестку, поэтому автомобиль всегда будет находиться в той полосе, из которой он может после пересечения перекрестка оказаться в нужной ему полосе. Обозначим множество вершины первой доли V={v1, v2, …, vn}, вершины второй доли W={w1, w2, …, wm}. Множество же ребер этого двудольного графа E={e1, e2, …, ek} в некоторых случаях будет удобно задавать в виде матрицы смежности A, в которой элемент Aij равен 1 в случае, когда есть ребро, ведущее от вершины vi к вершине wj.
Для организации движения будем использовать фазы разрешенных движений. Каждую такую фазу будем определять некоторым подмножеством Mi множества ребер E графа G, по которым будет разрешено движение в данной фазе. Очевидно, что в одной фазе желательно избегать таких траекторий движения, которые пересекаются на перекрестке. Возможны и другие варианты, которые не стоит использовать одновременно в рамках одной фазы. Чтобы учесть эти аспекты введем функцию g: EЧE > R+, определяющую меру нежелательности одновременного присутствия двух ребер в одной фазе. Для каждой фазы M определим g(M) как суммарное значение этой функции по всем парам ребер (1):

Будем рассматривать два типа управления движением: программное и с обратной связью. В первом случае мы имеем набор фаз M1, M2, …, Ml (среди них могут быть и повторяющиеся), которые последовательно включаются на определенное время t1, t2, …, tl соответственно. После окончания работы последней фазы вновь включается первая. Второй случай отличается тем, что в каждый момент времени выбирается фаза, исходя из дорожной обстановки в окрестности перекрестка в данный момент.
При моделирования движения будем считать, что для каждого ребра ei временной интервал для автомобилей, движущихся по нему, распределен по экспоненциальному закону с параметром лi. С таким интервалом генерируется автомобиль за 50 метров до перекрестка, движущийся со средней для этой полосы скоростью. В случае, когда совпадают моменты появления автомобилей, они генерируются так, чтобы расстояние между ними соответствовала минимально допустимой безопасной дистанции. При наличии впереди стоящего транспортного средства, автомобиль тормозит таким образом, чтобы не превысить минимально допустимое расстояние между ними.
Целевая функция, которую требуется минимизировать – это суммарное время, за которое автомобили доезжают до перекрестка, ожидают возможности проезда, пересекают перекресток и движутся от перекрестка по полосе назначения. При этом суммарное время нормируется по отношению к интервалу времени, в течение которого ведется наблюдение.
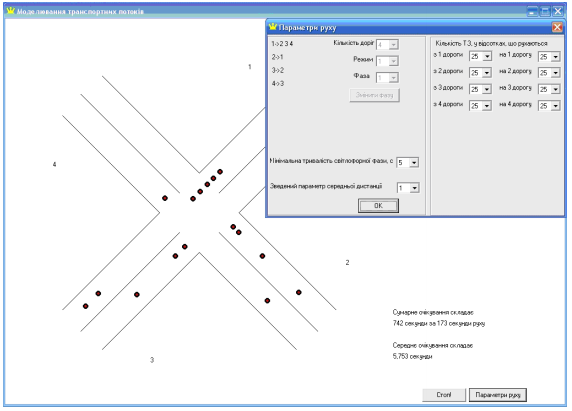
Рис. 1. Экранная форма программы моделирования
Компьютерная реализация.
Описанные алгоритмы моделирования транспортного потока и вычисления критерия качества реализованы программно на языке Delphi. Экранная форма программы моделирования показана на рис. 1.
Выводы
Применение математических моделей транспортных потоков позволяет оценить параметры пропускной способности дорожной сети при различных схемах управления движением, что может быть использовано в перспективе для решения следующих задач:
- расчет локальных режимов светофорного объекта в соответствии с картограммами интенсивности потоков и выбор оптимальных параметров организации движения на перекрестке;
- прогнозирование динамики транспортных пробок;
- анализ пропускной способности при различных режимах координации;
- оптимизация параметров улично-дорожной сети города для повышения пропускной способности.
На основе разработанного программного комплекса в дальнейшем возможна также разработка алгоритмов адаптивного регулирования в реальном времени для внедрения АСУДД с обратной связью по показаниям датчиков (видеокамер, индуктивных датчиков, радаров).
Список источников
- Дерех З.Д., Рейцен Є.О. Дослідження підвищення ефективності автоматизованих систем керування дорожнім рухом в Україні // Наук.-техн. вісник "Безпека дорожнього руху України". – 1999. – 1(2). – С. 79-85.
- Колесников A.Е., Нутович А.А., Гогунский В.Д. управление светофорами в режиме "зеленой волны" на магистралях с односторонним движением // Труды Одесского политехнического университета. – 1999. – Вып. 3 (9). – С. 131–133
- ATM Monitoring and Evaluation, 4-Lane Variable Mandatory Speed Limits. – Bristol, UK: Highways Agency, 2008. – (12 Month Report).
- Schrijver A. Flows in railway optimization // Nieuw Archief voor Wiskunde. – 2008. – 9, nr.2. – P. 126-131.
- Хейт Ф. Математическая теория транспортных потоков. – М.: Мир, 1966. – 286 с.
- Живоглядов В.Г. Методология повышения эффективности управления дорожным движением: автореф. дис. докт. техн. наук: спец. 05.22.10 „Эксплуатация автомобильного транспорта”. – С.-Петербург, 2008. – 37 с.
- Абрамова Л.С., Ширин В.В. Моделирование заторовых ситуаций по улично-дорожной сети // Автомобильный транспорт. – 2009. – Вып. 25. –С. 66-69.
- Farhi N. Modeling and Control of Elementary 2D-Traffic Systems using Petri Nets and Minplus Algebra // Proc. Joint 48th IEEE Conference on Decision and Control and 28th Chinese Control Conference. – Shanghai (P.R. China). – 2009. – P. 2292-2297.
- Петров В.В. Совершенствование организации движения в городах // Вестник Иркутского государственного технического университета. – 2009. – № 2 (38). – С. 45-48.