Аннотация
В статье приводится новый метод бинаризации растрового изображения на примере снимков эритроцитов крови человека. Метод основан на анализе двух близко расположенных областей изображения на наличие в них точек, подпадающих под выбранный критерий бинаризации, и корректировке данного критерия в зависимости от областей, прошедших бинаризацию.
Метод адаптивной бинаризации растрового изображения
В настоящее время системы компьютерного зрения достаточно широко и успешно используютсяв различных областях для таких операций, как контроль и отслеживание различных объектов, их классификации по внешнему виду, распознавание составных объектов, в системах OCR и в множестве других систем. Одним из основных методов обработки изображений в системах компьютерного зрения является бинаризация. Как правило, под бинаризацией подразумевают выделение границы объекта, содержащей исчерпывающую информацию о его форме, для последующего ее анализа и решения задачи кластеризации. Существует много разновидностей представления границы объекта, и выбор того или иного варианта зачастую зависит от решаемой задачи.
В отличие от представления границы объекта результат бинаризации, как правило, передается в виде двумерной матрицы с размерами, равными исходному изображению, где в качестве элементов матрицы выступают логические значения «1» или «0», с учетом соответствия «1» – граница объекта, «0» – прочая область. Данный вид представления результата процесса бинаризации является интуитивно понятным и может быть преобразован в заданный вид представления манипуляциями с матрицей. Таким образом, задача бинаризации сводится к преобразованию цветного, включая градации серого, растрового изображения в монохромное (1битное) изображение.
При решении задачи кластеризации объектов большую важность играет выбор алгоритма бинаризации, поскольку обычно только результаты работы алгоритма бинаризации используются в алгоритмах маркировки связанных областей, что является неотъемлемой частью решении задачи кластеризации. Выбор алгоритма бинаризации влияет на алгоритмы, применяемые далее для анализа изображения. Правильный выбор алгоритма бинаризации позволит использовать более простые и эффективные топологии и классификации, более быстрые методы кластеризации и существенно повлияет на точность результата анализа изображения.
Выделяют следующие виды алгоритмов бинаризации изображения:
адаптивная бинаризация;
обработка с постоянным порогом;
методы бинаризации на основе гистограмм ( как правило, гистограммы содержат функцию яркости от количества точек с соответствующей яркостью);
на основе нейронных сетей.
Рассмотрим подробнее алгоритмы адаптивной бинаризации как наиболее подходящие применительно к задаче распознавания эритроцитов крови человека на микроснимке. Проанализируем основные методы адаптивной бинаризации, применяющиеся на практике:
Метод Sauvola
Составляются 2 вспомогательных « интегральных» изображения. Первое представляет собой результат обработки квадратной апертурой всего изображения, где результирующее изображение получается как среднеарифметическое значение яркостей точек в квадратной апертуре.
Второе изображение создается схожим образом, но в отличие от среднеарифметического значения строится сумма квадратов яркостей точек в апертуре, и из этого значения вычитается квадрат среднеарифметического значения аналогичной апертуры из первого изображения.
В основном цикле проходим по точкам изображения. Если цвет точки меньше глобального минимума ( заданного в начале работы алгоритма), то результатом бинаризации данной точки является «1», если больше глобального максимума ( также заданного в начале работы алгоритма), то «0». Если цвет точки остался между глобальными порогами, происходит работа следующего алгоритма: для данной точки находятся соответствующие значения из первого и второго вспомогательных изображений, и в соответствии с формулой [1] вычисляется порог для текущей точки. На основе выбранного порога для данной точки проводится бинаризация.
Метод Bernsen
Выбирается квадратная апертура, как правило, с нечетным числом точек и, начиная с левого верхнего угла, передвигается по всему изображению. На каждом шаге в апертуре находится значение с минимальной яркостью точки ( обозначается как Min) и c максимальным значение яркости точки (обозначается как Max). Находится среднее значение Avg= (Min + Max) /2.
Для каждой точки изображения вычисляется яркость, и если яркость точки больше соответствующего значения Avg плюс E ( некоторая константа, заданная пользователем), то результатом бинаризации данной точки является «0», иначе – «1». Однако если Avg меньше порога контраста ( заданного в начале работы алгоритма), то текущий пиксель становится того цвета, который был выбран для цвета «сомнительного пикселя» [2].
Метод Niblack
Идея данного метода состоит в варьировании [3] порога яркости от точки к точке на основании локального значения стандартного отклонения. Порог яркости в точке (x, y) рассчитывается так: B(x,y) = ?(x,y) + k*s(x,y), где ?(x, y) – среднее, а s(x, y) – среднеквадратичное отклонение выборки для некоторой окрестности точки. Размер апертуры должен быть выбран так, чтобы сохранить локальные детали изображения и в то же время снизить влияние шума. Значение k определяет, какую часть границы объекта взять в качестве самого объекта.
Метод Gatos Thresholding
Составляются 2 вспомогательных изображения. Первое изображение является бинаризованным по алгоритму Niblack Tresholding и служит для определения фона и расположения объектов.
Второе изображение строится с использованием первого по следующему принципу: изображение становится идентичным оригинальному, изображены все точки, а соответствующие точки со значе нием «1» из первого изображения заменяются на интерполированные значения цвета соседних точек. В итоге получается фоновое изображение.
Выбирается каждая точка исходного изображения, и если разница между цветом точки и цветом соответствующей точки из фонового изображения больше порога, вычисляемого по определенной формуле [4], то результатом бинаризации данной точки является «1», а в противном случае – «0».
Метод максимальной энтропии
Формируется гистограмма на основе яркостей точек изображения и количества точек с определенной яркостью. Гистограмма нормализуется, и строится кумулятивная гистограмма, для каждого значения которой строятся с использованием нормализованной гистограммы еще 2 гистограммы: по энтропии черного цвета и по энтропии белого цвета. На основе гистограмм, построенных по энтропиям черного и белого цвета, определяется значение максимальной суммы [5], и выбирается соответствующий порог бинаризации. Далее происходит пороговая бинаризацию для найденного значении порога.
Новый метод адаптивной бинаризации
Поскольку ни один из описанных методов не обеспечил необходимого качества бинаризации изображений, содержащих эритроциты крови, было принято решение разработать новый алгоритм, отличающийся низким количеством шумов и выделяющий с высокой точностью клетки крови.
Фиксируется размер апертуры. Строится дополнительное изображение AdditionalImage, содержащее промежуточный этап бинаризации основного изображения по следующему алгоритму: окно перемещается по всему изображению, и в каждой области окна происходит бинаризацияи по выбранному типу ( для примера была взята интерпретация алгоритма градиентной бинаризации для локальной области, но алгоритм работает и при других методах бинаризации).
Для каждой точки исходного изображения заново строится окно с размерами, равными выбранной ранее апертуре. Для каждого конкретного окна выбираются все значения параметра P, равного значению параметра градиента между двумя любыми точками в окне, такие что значение параметра меньше заданного алгоритма бинаризации B ( использованного при построении изображения AdditionalImage). Все параметры P подвергаются корректировке в сторону увеличения, с учетом обратного нормального распределения для дискретной области. Причем обратное нормальное распределение применяется к дополнительному изображению AdditionalImage, содержащему результат проведенной ранее бинаризации. Если скорректированный параметр P получился больше параметра B, то соответствующая точка помещается в дополнительное изображение AdditionalImage. Тем самым в дополнительное изображение AdditionalImage добавляются новые точки границы, которые не были выделены ранее.
Операция с корректировкой значения параметра P может выполняться несколько раз, в зависимости от изображения и необходимого качества, требуемого от границы объекта.
Основной идеей алгоритма является учет специфики непрерывности границы объекта, а также более подробное рассмотрение участков границы объекта, не выделенных при шаге бинаризации. Алгоритм понижает критерий, предъявляемый к точкам, не прошедшим, предположительно, бинаризацию, но обнаруживаемым, результатом бинаризации которых является «1» ( точки, принадлежащие границе объекта). Чем ближе к выбранным точкам области с результатом бинаризации равным «1», тем более мягкие требования предъявляются к критерию выбора точек, принадлежащих границе, которые будут помечены результатом бинаризации равным «1».
Такой подход позволяет задавать высокие критерии к выбору начальных точек границы, достаточных для выделения небольших, заведомо известных ее частей, а остальные точки границы будут достроены на следующих шагах, за счет пониженного критерия, поскольку будут располагаться вблизи заведомо определенных точек границы.
Анализ методов
Обычно этап бинаризации тесно связан с последующими этапами анализа изображения, применяемого при распознавании объектов, и с практической точки зрения качество работы алгоритма оценивается, исходя из этапов анализа изображения в целом. Также в описании к некоторым алгорит мам, используемым после этапа бинаризации, явно сказано, что для их работы необходимо сделать определенного вида предобработку, как правило, заключающуюся в фильтрации изображения.
Достаточно сложно сравнивать непосредственно результат работы алгоритмов бинаризации по данным анализа изображения целым комплексом алгоритмов, в которых алгоритмы бинаризации применяются. Один из подходов, используемых при сравнении результата работы таких типов алгоритмов, был взят на вооружение в работах [1, 3, 4, 8] и основывался на бинарном сравнении работы метода с эталонным результатом c помощью Fмеры (F-measure) [7] как определенный аналог расстояния Левенштейна [9], применяемого при анализе печатного текста.
Для сравнения работы алгоритмов выберем параметр F-меры (F-measure) [7], причем сбалансированной Fмеры. В качестве эталона были взяты отретушированные фотографии, из которых были исключены дефекты и шумы, а объекты были идеализированы. Пример работы алгоритмов рис. 1. Результаты измерения Fмеры можно увидеть в табл. 1.
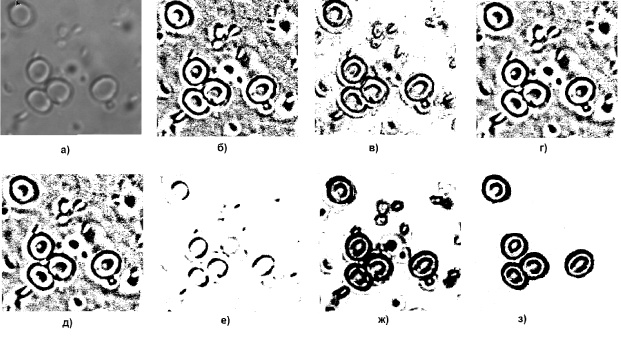
Рисунок 1. Результат применения адаптивных методов: а) часть исходного изображения; б) Sauvola; в) Bernsen; г) Niblack; д) Gatos Thresholding,; е) Максимальной энтропии; ж) Разработанный метод бинаризации; з) Ground truth для отретушированного изображения
Таблица 1
Результаты сравнения методов по параметру F-меры, в таблице отображено среднеарифметическое значение меры после обработки 10 снимков
| Название метода | Параметр сбалансированной F-меры |
|---|---|
| Sauvola | 0,2547 |
| Bernsen | 0,3232 |
| Niblack | 0,2306 |
| Gatos Thresholding | 0,2353 |
| Максимальной энтропии | 0,1346 |
| Разработанный метод адаптивной бинаризации | 0,4674 |
Достаточно низкое ( менее 0,5) значение в табл. 1 обусловлено не только применяемыми алгоритмами адаптивной бинаризации, но и выбором оптимальной бинаризации рис. 1.з, поскольку фотографии для нее были подготовлены и ретушировались с помощью специализированных средств, на них были оставлены только заранее выбранные идеальные объекты. Также дополнительная обработка в виде фильтрации полученных результатов бинаризации не проводилась ( даже если это было указано в рекомендациях какого-либо алгоритма бинаризации), поскольку сравнивались сами алгоритмы бинаризации, а дополнительная фильтрация не являлась частью алгоритма бинаризации и могла внести искажение в результат его работы. К тому же, подбор алгоритмов фильтрации был бы разным в зависимости от задачи и самого алгоритма бинаризации, что еще сильнее влияло бы на конечный результат.
Стоит отметить немаловажную особенность работы алгоритмов бинаризации, а именно плотность точек границы объектов, полученных в процессе бинаризации и сформированных как элементы границы в последующих алгоритмах, поскольку не у всех алгоритмов потенциальная граница объектов получалась непрерывной. Это также накладывает ограничения на применение алгоритмов распознавания и кластеризации, в частности, на применение методов контурного и факторного анализа.
Предложенный алгоритм адаптивной бинаризации позволяет достоверно выделять границы объектов при условии, что часть границы может быть размыта и находится вне фокуса. Алгоритм исследован на реальных изображениях с клетками крови человека, и его достоинством является высокая точность выделения границ объектов при невысокой математической сложности алгоритма и низкой чувствительности к шумам.
Библиографический список
1. Sauvola J., Petikainen M. Adaptive document image binarization, Pattern recognition 33 (2000) 225-236
2. Bernsen J. Dynamic thresholding of grey-level images, Proceedings of the Eighth ICPR, 1986, pp. 1251-1255.
3. Niblack W. An Introduction to Image Processing, Prentice-Hall, Englewood Cli!s, NJ, 1986, pp. 115-116
4. Gatos B., Pratikakis I., Perantonis S.J. Anadaptive binarisation technique for low quality historical documents In: IAPR Workshop on Document Analysis Systems (DAS2004), Lecture Notes in Computer Science (3163), September 2004, pp. 102–113 (2004)
5. Jarek S. Maximum Entropy Thresholding, http://ij-plugins.sf.net
6. Kapur J.N., Sahoo P.K. and Wong A.K.C., A New Method for Gray-Level Picture Thresholding Using the Entropy of the Histogram, CVGIP, (29), pp.273-285, 1985
7. Sasaki Y. The truth of the F-measure, School of Computer Science, University of Manchester MIB, 131 Princess Street, Manchester, M1 7DN. Version: 26th October, 2007
8. Gatos B., Pratikakis I. and Perantonis S.J. Improved Document Image Binarization by Using a Combination of Multiple Binarization Techniques and Adapted Edge Information, Computational Intelligence Laboratory, Institute of Informatics and Telecommunications, National Research Center "Demokritos",153 10 Athens, Greece, 2008
9. Levenshtein V.I.: Binary codes capable of correcting deletions, insertions and reversals. Sov. Phys. Dokl., 6 (1966) 707-710
10. http://habrahabr.ru/post/128768/
11. http://www.djvu-soft.narod.ru/