
Abstract
Content
- Introduction
- 1. Goals and tasks
- 2. Actuality
- 3. Scientific novelty
- 4. Own researches and planned practical results
- Conclusion
- References
Introduction
Modern robotics originated in the middle of the 20th century, when in the course of development of production there is a real need for universal manipulation machines. Predecessors robots were different kind of device for manipulating objects at a distance, with contact being dangerous or not possible for humans. The first such device was passive, that is, without the drive mechanisms and worked by the muscular effort. Later were created manipulators with actuators that control a person in different ways [1]. The first of these manipulators were created in 1940-1950 for nuclear research and, later, for the nuclear industry.
Modern robots are a new stage of its development - the creation of intelligent robots. Modern robot is mobile, able to explore the environment to solve a number of problems, which provided by the creators, but this does not guarantee its full autonomy. That is why the theme of remote control is still relevant.
In this paper will be presented to management study
operator - computer - remote managed object
with the differential robot.
1. Goals and tasks
The work is scientific and practical, and its main aim is the study of methods and approaches to solving the problem around obstacles using a single camera and development of remote mobile robot control dialog. When the dialog control, in the case of not solving the problem of avoiding obstacles, the robot sends a signal to the operator and the operator moves along the specified direction.
To achieve these objectives it is necessary to solve a number of problems:
- Studies features wireless data from the terminal board to the robot.
- Study possibilities of application of computer vision for mobile robot.
- Developing minimum framework for the implementation of a mobile robot with remote remote control.
- Development of detection algorithm and obstacle avoidance.
- Development of software that allows you to connect to this robot to control it, to have the ability to monitor the environment around the robot.
- Experiments on the resultant implementation of the robot.
2. Actuality
In cases where a human operator can’t be at risk for health and life situations without remote control is indispensable. It is worth mentioning that the remote control is applicable to any operating system that has electronic controls.
Remote Control gives the following advantages:
- time savings when inspecting a managed object, as surveillance is conducted by the operator;
- act from any distance;
- simultaneous control of multiple objects from a single terminal;
- productivity increases in work;
- increased job security;
- possibility of reducing the number of operating personnel.
In the case of mobile object control operator is important to see the situation around the object. To control the robot situation can be observed from the object, or the entire area, including the object on top. The latter method requires an undetermined number of cameras, depending on the complexity of the relief, so often the object is equipped with a video surveillance system.
One of the main requirements for the mobile unit besides going in different directions is a detour and avoid collision with obstacles. Currently, there are a huge number of methods and algorithms to identify obstacles, but the main drawback of most methods is the fact that almost all methods require some equipment, for example, various sensors. Different methods require a different set of sensors. The current trend is to study the application of such technologies that would implement processes as their man performs. It is primarily concerned with techniques and obstacle avoidance. Implementation of computer vision techniques to identify obstacles is challenging. Quite insufficient to attach the camcorder to a computer and expect that this installation will see
, and even more responsive to the surrounding obstacles.
3. Scientific novelty
Novelty is the modification of obstacle avoidance algorithm according to the visuals for the implementation of the robot with minimal configuration and adaptation of the system to operate with any computing device.
4. Own researches and planned practical results
To study the functioning of the wireless control system of a robot, a scheme of the mobile object management system. The system has the ability to manage multiple moving objects from one terminal device and provides the necessary level of immunity.
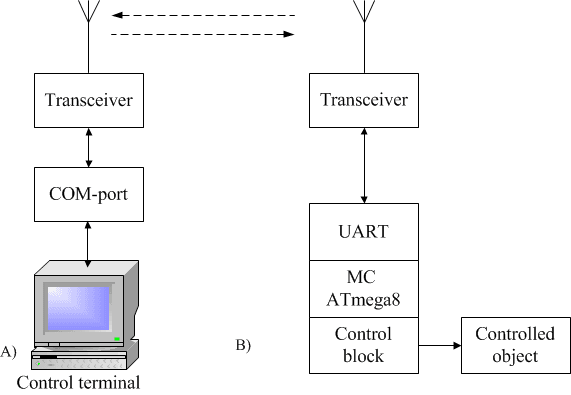
Figure 1 - Coupling scheme between the computer (A) and the tank (B)
Transfer commands from the terminal device for the control object by means of radio, which is implemented on the modules frequency modulation HOPE RF HM-R433 and HOPE RF HM-T433 [14]. Frequency modulation modules are connected to a terminal device and a control device of the mobile object through the serial interface RS- 232 (COM port). Control device movable object built on the microcontroller ATmega 8 firm Atmel [15]. The controller receives commands via radio, analyzes it and outputs the corresponding control signals to the control unit of the object. Instruction are codes ASCII.
To manage a computer program installed Terminal 1.9b, which allows you to send to the COM port and receive from the COM port information. The terminal program simulates the operation of the management body object type joystick or keyboard and is used only for debugging control system.
Commands are transmitted in the form of a data packet. Packet data transmission command has the following format:
- byte to the transmitter output from sleep mode;
- 10 identical symbols to identify the packet from the total noise;
- receiver code (number of tank);
- command code;
- Clarification for the team;
- end of the packet.
Object management apparatus receives the data packet processes it, and executes the corresponding command. In the case of sending commands to the server control device object sends a packet with the following structure:
- byte to activate the transmitter;
- 10 identical symbols to identify the packet from the total noise;
- transmitter code (number of tank);
- battery;
- battery level sensor for detecting events falling into the tank;
- end of the packet.
The control device of the mobile object is implemented on a microcontroller ATmega 8 firm Atmel, whose block diagram is shown in Fig. 2. Radiomodules connected to the control unit via a serial UART interface microcontroller. Receiver Module HM-R433 to the input RXD, and the transmitter module to TXD. Speed control motors used pulse-width modulation (PWM), which is implemented using timers microcontroller. To control the left engine 's output OC1A microcontroller and the right to control - OC1V. Direction of rotation of the left and right motor drive signals from pins PB5 and PB6.
Sensor measuring battery level is connected to the input ADC0 analog-digital converter (ADC) microcontroller. Infrared sensor lighting - to the input ADC1.
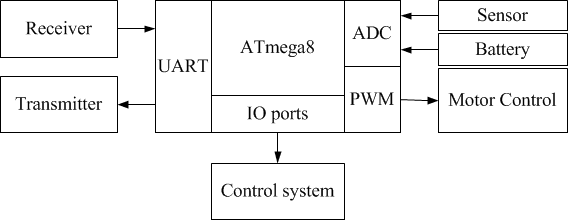
Figure 2 - Block diagram of the control unit tank
During the experiments, it was found that this system works at a distance of 30 m 9600 bps. Required to transmit video transmission rate of at least 1.8 MB/sec. Thus for the camera requires a separate transmitter.
After analyzing the hardware to implement controlled robot, with the possibility of video surveillance and obstacle avoidance were identified hardware necessary to create a simple mobile robot for the study:
- Mobile platform.
- Sensors for obstacle detection.
- Transceiver to transmit information about the state of the mobile robot and commands from the operator of the mobile robot.
- The robot control unit, which will be located on a movable platform and process operator commands and build on the current status.
- An operator workstation.
- Surveillance robot device.
Principle of the system is shown in Figure 3.
Figure 3 - General scheme of the device assembled
(Animation: 3 iterations; 400х251 px; 28,9 kB)
As an operator workstation using a laptop with Wi-Fi-transmitter. Remote control is also possible to implement on the basis of the phone with OS Android.
As the sensor and transmitter of information about the environment around the robot using IP-camera WEBCAM for ISO ANDROID. The following characteristics of the camera:
- Action radius camera complies with IEEE 802.11 b/g/n;
- The volume of data transferred 30 bps;
- Resolution 640x480 p;
- Compression formats LPEG and MJPEG.
In this study, obstacle avoidance is implemented using only the video stream, so as sensors use your camcorder. Because the algorithm Video stream processing at the development stage and during the study undergoes modifications decided to use video processing option on the controlling terminal. A significant advantage of this choice is that the mobile robot does not need a powerful on-board computer, and therefore can do microcontroller family ATtiny or ATmega from Atmel.
As the transmitter selected Wi-Fi module SPB800 [16]. Module is selected by the following characteristics:
- Data rates: 1, 2, 5.5, 6, 9, 11, 12, 18, 24, 36, 48, 54 Mbit/s;
- Hardware encryption acceleration (protocols WEP and AES, the key length to 128 bits);
- Support for UART, baud rate of 9600 bit/s to 3.6 Mbit/s;
- Supported protocols: TCP/IP, DHCP, UDP, ICMP, HTTP;
- Supported operating modes: ad-hoc, infrastructure.
For supplying a control signal to the robot motors using a driver L293D. L293D scheme contains just two drivers to control low power motors (four independent channels, combined with two pairs). It is possible to operate with pulse width modulation (PWM). L293D division provides power to the chip and its controlled motors, allowing you to connect with a large electric voltage than the chip.
The algorithm consists of the following steps:
- Obtain a picture environment with video cameras;
- image processing (edge detection of objects, detection of obstacles on the image frame);
- determination of the parameters and the orientation of the obstacle;
- data generation for the control system.
Video processing algorithms implemented thanks to the library OpenCV.
Conclusion
In the master's work is implemented and studied the connection between the control terminal (computer) and the movable object. Found that for the implementation of a video surveillance system capabilities of this implementation is not enough.
The choice of a minimum configuration for the implementation of a mobile robot with a camera as the only sensor. It is possible to broadcast video operator.
The analysis of the basic algorithms for video and obstacle detection.
In writing this essay master's work is not yet complete. Final completion: December 2014. Full text of the work and materials on the topic can be obtained from the author or his manager after that date.
References
- Юревич Е.И. «Основы робототехники». - 2-е изд., перераб. и доп. - Спб.: БХВ-Петербург, 2005. - 416 с.: ил.
- Мой робот РУ сайт посвященный робототехнике / Internet resource. - Mode of access: www/ URL: http://www.myrobot.ru/articles/hist_1950.php - Caps. With the screen.
- Кафедра "Специальная робототехника и мехатроника", МГТУ им. Н.Э.Баумана, история кафедры / Internet resource. - Mode of access: www/ URL: http://hoster.bmstu.ru/~sm7/History/History_glavnew.htm - Caps. With the screen.
- Соснина А., статья «Сучасний стан та перспективи розвитку робототехніки в Україні», 2013.
- Технический парк Донецкого национального университета / Internet resource. - Mode of access: www/ URL: http://masters.donntu.ru/techpark/index.htm - Caps. With the screen.
- Моя магистерская / Гранковский В.А. / Internet resource. - Mode of access: www / URL: http://masters.donntu.ru/2013/fknt/grankovsky/thesis.htm- Caps. With the screen.
- Беспилотный автомобиль Google (Google выдаст больше ссылок, чем я)
- Как смартфоны чувствуют мир. Часть 1: акселерометры, гироскопы и другие сенсоры / Олег Коленченко / Internet resource. - Mode of access: www / URL: http://www.ferra.ru/ru/techlife/review/mems-part-1/#.U4iJ7vl_voF - Caps. With the screen.
- История вычислительной техники за рубежом / Internet resource. - Mode of access: www / URL: http://www.computer-museum.ru/frgnhist/ - Caps. With the screen.
- KINEMATICS MODELS OF MOBILE ROBOTS / Internet resource. - Mode of access: www / URL: http://users.isr.ist.utl.pt/~mir/cadeiras/robmovel/Kinematics.pdf - Caps. With the screen.
- Visual Sonar: Fast Obstacle Avoidance Using Monocular Vision / Internet resource. - Mode of access: www / URL: http://www.cs.cmu.edu/~mmv/papers/03iros-sonar.pdf - Caps. With the screen.
- Optical Flow based robot obstacle avoidance/ Internet resource. - Mode of access: www/ URL: http://cdn.intechopen.com/pdfs-wm/4206.pdf - Caps. With the screen.
- A Simple Interface for Mobile Robot Equipped with Single Camera using Motion Stereo Vision/ Internet resource. - Mode of access: www/ URL: http://www.ijmlc.org/papers/204-L293.pdf - Caps. With the screen.
- Радиомодули HOPE-RF. С. Светлов// Беспроводные технологии – 2009, №2. – С.32 – 35.
- Евстифеев, А.В. Микроконтроллеры AVR семейства Mega. Руководство пользователя. — М.:Издательский дом «Додэка-XXI», 2007. — 592 с: ил.
- Техническая документация SPB800 / Internet resource. - Mode of access: www / URL: http://datasheet.octopart.com/SPB800-BCP1-H%26D-Wireless-datasheet-17745178.pdf- Caps. With the screen.