Abstract
This article gives a valuable information about the software of Robotino View. This topic is relevant because Robotino View allows to successfully control the robot, and gives ability to program Robotino for its autonomous movement. The Robotino View is an interactive visual learning software for controling the robot, which contains various blocks which help to create program for perform a certain task. For example, blocks PathDriver Position View is used to move the robot to the desired path, the problem of determining the color of the object is performed by the camera and the power function Segmenter and block-diagram of the "distance" permit to stop robot on distance from object. In conclusion, the software of Robotino View allows you to solve tasks for a robot's moving. Keywords: path, distance, position.
Ключевые слова
Траектория, расстояние, местоположение.
В настоящее время в мире интенсивно расширяются области исследований и использования мобильных роботов - мехатроных систем, базирующихся на последних достижениях механики, микропроцессорной техники, контрольно- измерительных систем, информатики и теории управления.
Для моделирования работы мобильных роботов и средств автоматизации и используется учебный комплекс Robotino.
Учебная система Robotino, как и все мобильные роботы имеет специальное компьютерное обеспечение Robotino View.
Рис. 1 Соединение Robotino c компьютером
Robotino View - это интерактивная визуальная программно учебная среда для робота, которая соединяется с помощью Wireless LAN прямо с системой управления робота. Поэтому, чтобы управлять Robotino, необходим только персональный компьютер, который может установить связь с WLAN, изображенную на рис. 1.
После установления связи Robotino будет являться точкой доступа для компьютера. Каждый Robotino должен иметь одинаковый IP-адрес, так как каждый формирует свою собственную сеть.
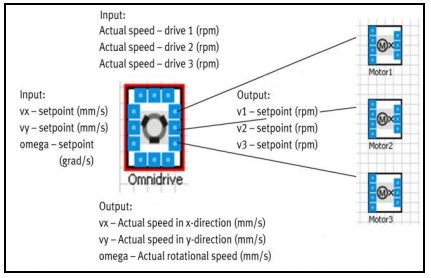
Рис. 2 Функциональный блок "omnidrive"
Robotino имеет три двигателя, которые приводят в действие три многонаправленных колеса. Скорость вращения отдельного колеса может быть установлена независимо от скорости вращения других колёс. Для перемещения Robotino в одном направлении, вращение отдельных колёс должно быть скоординировано, так как правильное их взаимодействие обеспечивает желательное перемещение Robotino.
Двигатели могут приводиться в действие или напрямую при помощи программы Robotino View или с помощью функционального блока «omnidrive», представленного на рис. 2.
Однако, использование функционального блока «Omnidrive» (Robotino View) рекомендуется для всех приложений.
Функциональный блок «omnidrive» на основании точно заданной скорости вычисляет установочные скорости вращения двигателей 1, 2 и 3 в направлениях х и у. Кроме того, действительная скорость в направлениях х и у и действительная скорость вращения вычисляются из действительной скорости.
Для управления роботом используются различные блоки. Рассмотрим блоки, которые помогают реализовать задачу перемещения мобильного робота по заданной траектории и задачу обнаружения Robotino объекта определенного цвета и остановка робота на заданном расстоянии от него.
Функциональный модуль Camera разрешает доступ к изображениям web-камеры Robotino. Камера подсоединена к устройству сопряжения через один из двух USB разъёмов. Разрешение изображения может быть отрегулировано поворотом линзы.
Изображение с камеры отображается в диалоговом окне функционального блока.
Размер изображения изменяется с увеличением диалогового окна. Размер изображения на экране показывается в процентах от действительного размера изображения. Цветовое пространство можно выбрать через среднее окно списка [2].
Так как движение будет совершаться по специально заданной ранее траектории, используем блоки PathDriver и Position View, которые находятся в подпункте Navigation, показанном на рис.3.
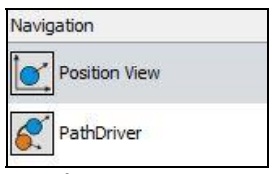
Рис. 3 Блоки навигации
Блок функции Segmenter (Сегментатор) на рис.4 распознаёт области одного и того же цвета в пределах изображения и обеспечивает возможность определения заданных цветов.
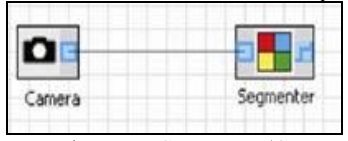
Рис. 4 Блок функции Segmenter
Сегментатор обрабатывает изображение, полученное с web-камеры. Неподвижное изображение выбирается из изображения камеры щелчком «мыши» на условном обозначении камеры в диалоговом окне функционального блока.
Интерактивная визуальная программно учебная среда для робота Robotino View с помощью блок-схем функции «дистанция», изображенная на рис. 5, позволяет управлять данными датчиками, дает возможность определять расстояние от препятствия и останавливаться при столкновении [1].

Рис. 5 Блок-схема функции "Дистанция"
При управлении перемещением робота необходима защита от повреждений в случае сбоя работы. Для этого используется датчик защиты - чувствительная поверхность.Чувствительная поверхность на Robotino работает в соответствие с принципом тока в рабочей точке так, что разрыв кабеля может быть обнаружен и Robotino остановится.
Буфер, изображенный на рис. 6, доступный в программе Robotino View в Robotino находится в папке аппаратных средств и не нуждается в параметризации.
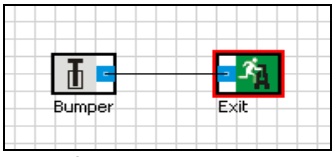
Рис. 6 Блок-схема "Bumper"
Он вырабатывает один сигнал после соприкосновения и используется главным образом для остановки Robotino в случае столкновения. Для этой цели он подсоединён к выходу папки Sequence Control (Контроль последовательности). Тогда в случае столкновения программная последовательность прерывается.
В итоге робот совершает перемещение по поверхности, определяя объекты на своем пути и останавливаясь на заданном расстоянии от него. В случае сбоя работы или программы робота, сработает датчик защиты и позволит безопасно завершить его дальнейшее перемещение при незначительном столкновении, которое не приведет к поломке робота.
Список литературы:
l. Bliesener, Weber, Karras, Kling, Zitzmann. Festo. Robotino® .- Denkendorf, 2007
2. Официальный сайт Festo [Электронный ресурс] Режим доступа: http://www.festodidactic.com