Аннотация
Сегментация изображения разделяет изображение на значимые области. Распознавание объектов – задача нахождения объекта на изображении или видео потоке. В этой работе рассматривается взаимодействие между сегментацией изображения (которые используют различные граничные методы обнаружения) и объектом распознавания. Методы обнаружения контуров, такие как оператор Собеля, Прюитта, Робертса, Кэнни, Лапласиана Гаусса используются для сегментации изображений. Алгоритм «Expectation Maximization» (EM), OSTU и Генетические алгоритмы используются для демонстрации совместных действий между сегментированными изображениями и распознаваемым объектом.
КЛЮЧЕВЫЕ СЛОВА
Алгоритм EM, OSTU, генетический алгоритм, Сегментация изображения, обнаружение объектов.
Введение
Сегментация изображения - это основа распознавания объектов и машинного зрения. Перед обработкой изображения, необходимо удалить шум, это достигается посредством предварительной обработки изображения. Существут специальные методы, позволяющие получить этот эффект для улучшения визуального эффекта изображения. Для решения задач компьютерного зрения, связанные сегментацией изображения и распознаванием объектов, традиционно использовались строгое восходящее упорядочивание.
Сегментация изображения - это процесс разделения цифрового изображения на кратное число значимых областей или наборов пикселей относительно заданного критерия.
Сегментация основывается на измерениях, проведенных над изображением, и может быть уровнем серого, цветом, текстурой, глубиной или движением. Результат сегментации изображения - ряд сегментов, покрывающие все изображение. Все пиксели в области подобны друг другу относительно некоторой характеристики или вычисленному значению, таких как цвет, интенсивность или текстура. Смежные области отличаются относительно тех же характеристик. Выделение контуров - один из часто используемых методов в обработке цифровых изображений.
Распознавание объектов - задача нахождения данного объекта на изображении или видео последовательности. Любому объекту на изображении соответствуют различные характеристики, которые являются показательными особенностями объекта, описывающие свойства данного объекта. Эти характеристики получаются из обучающего множества для того, чтобы идентифицировать местоположение объекта, а из тестового множества – много других объектов [3, 4].
Сегментация изображений осуществляется с помощью различных методов обнаружения края, таких как операторы Собеля, Прюитта, Робертса, Кэнни, Лапласиана Гаусса, EM алгоритм, OSTU и генетический алгоритм[1,2].
В дааной рабботе изучена реализация сегментации и распознавания объектов с использованием указанных методов [1]. Экспериментирование выполняется на полутоновом изображении, используя MATLAB 7.9. В этой статье, в разделе 2 рассматривается сегментация и сравнение различных граничных методов обнаружения. В разделе 3 рассматривается сегментация изображения и распознавании объектов, используя другие методы. Реализация и результаты показаны в разделе 4. Итоги подводятся в разделе 5.
1. Сегментация
Сегментация - процесс разделения цифрового изображения на его составные части или объекты, или регионы. Эти области совместно имеют общие характеристики на основе цвета, интенсивности, текстуры, и т.д. Первый шаг в анализе изображения должен сегментировать изображение на основе метода обнаружения разрыва (основанный на крае) или (основанный на области) метод обнаружения подобия.
Для обнаружения разрывов применяется один из подходов техника, которой состоит в разделении изображения на основе резких изменений интенсивности вблизи контура, и известен как контур на основе сегментации.
В методе обнаружения подобия определятся область сегментации, которая делит изображение на регионы, которые подобны согласно предопределенному критерию. Основанная на данном подходе, сегментация ищет однородность в подобласти, основанной на желаемом свойстве, например, интенсивности, цвете и текстуры как показано на рисунке 1.
Различие между областью, полученной после сегментации и контуром - после сегментации показано в Таблице 1.
Активные контуры - популярный метод для сегментации изображения. Преимущество активных контуров как методы сегментации изображения в том, что они делят изображение в подобласти с непрерывными границами. Есть два вида активных моделей контура: основанные на крае активные контуры используют граничный детектор, обычно на основе градиента изображения, чтобы найти границы подобластей и притянуть контуры к обнаруженным границам. Основанные на области активные контуры используют статистическую информацию интенсивности изображения в каждом подмножестве вместо того, чтобы искать геометрические границы.

Рисунок 1–Область после сегментации
| Области | Контуры |
|---|---|
| Замкнутые контуры | Конуры не обязательно замкнуты |
| Мультиспектральное изображение улучшает сегментацию | Не значительное улучшение мультиспектрального изображения |
| Вычисление основано на подобии | Вычисление основано на различиях |
1.1. Обнаружение контуров для сегментации изображений
Контур на изображении является значительным локальным изменение интенсивности изображения, и как правило, связаны с разрывом интенсивности изображения или первой производной интенсивности изображения.
При моделировании пользователь может выбирать метод решения дифференциальных уравнений, а также способ изменения модельного времени (с фиксированным или переменным шагом). В ходе моделирования имеется возможность следить за процессами, происходящими в системе. Для этого используются специальные устройства наблюдения, входящие в состав библиотеки Simulink. Результаты моделирования могут быть представлены в виде графиков или таблиц.
Три шага в процессе выделение контуров- это [6] а) фильтрация б) усиление и в) выделение.
Фильтрация применяется, если изображения были повреждены шумом, таких как соль и перец шума, импульсными помехами и Гауссовским шумом. Так же учитывается компромисс между прочностью края и снижением уровня шума при фильтрации.
Усиление подчеркивает пиксели там, где существует значительное изменение в локальной интенсивности и обычно выполняется путем вычисления градиента
Выделение. У Многих точек на изображении есть ненулевое значение градиента, и не все из этих точек - края для заданного изображения. Пороговая обработка используется для обнаружения граничных точек.
Различные методы обнаружения края используются в операторах Собеля, Прюитта, Робертса, Кэнни, Лапласиана Гаусса, EM алгоритме, OSTU и генетическом алгоритме.
2.1.1. Оператор Собеля
Данный метод выполняет 2-D пространственное измерение градиента на изображении и усиливает области высокой пространственной частотой, соответствующие краям. Маска свертки для оператора Собеля показана на рисунке 2, и используется для получения величины градиента из заданного изображения.

Рисунок 2–Маска оператора Собеля
2.1.2. Оператор Прюитта
Оператор Прюитта – это приблизительный способ оценки величины и ориентации края. Маска свертки Прюитта оператора показана на рисунке 3.

Рисунок 3–Маска оператора Прюитта
2.1.3 Оператор Робертса
Выполняется 2-D измерения пространственного градиента на изображении. Это выделяет области с высокой пространственной частотой, которые часто соответствуют контурам. Маска свёртки показана на рисунке 4.

Рисунок 4–Маска оператора Робертса
2.1.4 Лапласиан Гаусса
Это производная второго порядка. Цифровая реализация Лапласиана производится с помощью маски, приведенной на рисунке 5.
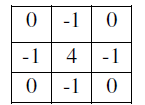
Рисунок 5–Маска оператора Гаусса
2.1.5. Оператор Кэнни
Оператор Кэнни - это метод, нахождения контуров, который изолирует шум на изображении без затрагивания особенности краев на изображении, а затем применяя тенденцию нахождения контуров и критическое значение для порога.
Сегментация изображения и обнаружение объектов
В сегментации изображения используются порождающие модели для того, чтобы решить, какую часть изображения должна занять модель. Активная Модель Появления (AAMs) используется в качестве порождающих моделей и решает проблему объединенного обнаружения и сегментации объектов в изображениях [1,5]. Относительно распознавания каждая объектная гипотеза проверена на основе области изображения, присвоенной объекту, а также предполагаемые параметры модели, которые указывают на появление объекта. С одной стороны, знание области, занятой объектом, необходимо для оценки параметров модели, а, с другой стороны, - чтобы присвоить наблюдения модели. Так как ни один не известен заранее, мы не можем решить каждую проблему отдельно. Эта задача рассматривается как часть более широкой проблемы оценки параметра с недостающими данными. Известный инструмент для решения таких проблем - это алгоритм EM. Алгоритм Expectation-maximization (EM) используется для поиска максимального правдоподобия оценки параметров в вероятностных моделях, где модель зависит от ненаблюдаемой скрытой переменной. Для того чтобы найти оценки максимального правдоподобия мы должны найти плотность вероятности функции логарифмического правдоподобия.
3.1. Алгоритм Expectation-Maximization
Алгоритм EM - эффективная итеративная процедура для нахождения максимального правдоподобия. Каждая итерация алгоритма EM состоит из двух процессов: Е- шаг и M-шаг. В ожидании, или Е - шаге, недостающее данные оцениваются с учетом наблюдаемых данных и текущей оценке параметров модели. На M-шаге, функция правдоподобия максимизируется используя предположение, что недостающие данные известны. Оценки недостающих данных от Е - шага используются вместо фактических недостающих данных.
Алгоритм EM стремится найти MLE, многократно повторяя выполнение двух шагов:
- Шаг ожидания: рассчитывает ожидаемую величину функции логарифмического правдоподобия, по отношению к z данного х при текущей оценке параметров θ(t)
- Шаг максимизации: находит параметр, который максимизирует это количество.
3.2. Сегментация изображений с помощью OTSU
Алгоритм OTSU основывается на выборе порога. Метод OTSU является одним из методов, который применяет сегментацию изображения при помощи выбора порога автоматически для его простого расчета и хорошей адаптации. В обработке изображений, способ сегментации OTSU используется для автоматического уровня бинаризации решения, основанного на гистограммах. Алгоритм предполагает, что изображение состоит из двух основных классов: передним и задним планом. Далее вычисляется оптимальное пороговое значение, что сводит к минимуму взвешенный в классовых дисперсиях этих двух классов. Математически доказано, что сведения к минимуму в классе дисперсии такое же, как и к максимизации между классами дисперсии.
Различные методы нахождения порогов:
- методов на основе формы гистограммы;
- методы кластеризации;
- методы на основе энтропии;
- объектный метод на основе атрибутов;
- пространственный метод;
- локальные методы.
Основная проблема порога заключается в том, что рассматривается только интенсивность, а не отношения между пикселями. Нет гарантии, что пиксели будут идентифицированы.
Шаги алгоритма OTSU (для каждого потенциального порога T):
- Разделение пикселей на два кластера согласно порогу.
- Нахождение среднего значение для каждого кластера.
- Задание различной квадратной формы между средствами.
- Умножение на число пикселей в кластере на число в другом.
3.3 Сегментация изображения на основе генетического алгоритма
Генетические алгоритмы можно рассматривать как программные средства, которые пытаются найти структуру данных, которая может показаться случайной или сделать, казалось бы, неразрешимую проблему более или менее разрешимой.
Генетический алгоритм может быть применен к областям где недостаточно данных и / или сложность слишком высока для аналитического решения.
В основном генетический алгоритм состоит из трех главных операций: выбор, перекрестное соединение, и мутация. Оценивается каждый выбор по отдельности и хранятся только самые подходящие данные. В дополнение полученному множеству некоторые менее подходящие значения могли быть выбраны соответственно с маленькой вероятностью. Другие - удалены из текущего множества.
Происходит перекрёстный обмен данными для формирования более подходящих множеств. Оператор мутации вызывает изменения в небольшом количестве модулей хромосом. Его цель состоит в том, чтобы поддержать объекты множества для разностороннего развития достаточно во время процесса оптимизации.
Генетический алгоритм основан на следующих основных принципах:
- Воспроизведение
- Соответствие
- Перекрестное соединение
- Мутация
Алгоритмы кодирования перекрестного соединения как обмен битами, больше похожи на одиночную точку мутации, чем на «реальное перекрестное соединение», или нескольких битов (используемые в генетическом программировании) и различие между двумя родителями (строки битов, но называемые хромосомами в терминологии генетического алгоритма), кто идентичен, два различных родителя или родитель-одиночка. Во всяком случае, процесс имеет следующую процедуру:
- Выбирается две битовые строки (хромосомы), или в случае генетического программирования: выбирается часть каждого родителя.
- Удаляется хромосома (или часть) в конкретном месте.
- Меняется местами бит/ветви двух родителей.
4. Реализация и результаты
Данные методики были применены к различным изображениям. Цветные изображения были преобразованы в изображения с градацией серого цвета, а затем проведена сегментация и были применены методы распознавания.
Пример серого масштабируемого изображения (см. рис. 6) используется для сегментации и распознавания объектов с использованием операторов Собеля, Прюитта, Робертса, Кэнни, Лапласина Гаусса, алгоритм EM, алгоритм OSTU и генетический алгоритм. В таблице 2 приведено сегментированное изображение и полученное изображение.

Рисунок 6–Исходное изображение
| Оператор/Алгоритм | Сегментированное изображение | Распознанное изображение |
|---|---|---|
| Оператор Собеля | 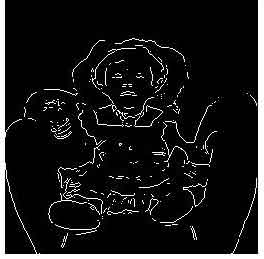 |
 |
| Оператор Прюитта | 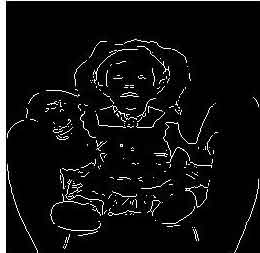 |
|
| Оператор Робертса | 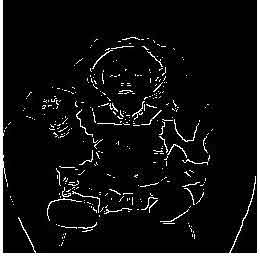 |
|
| Лапласиан Гаусса |  |
|
| Оператор Кэнни |  |
|
| Алгоритм EM |  |
|
| Алгоритм OSTU |  |
|
| Генетический алгоритм |  |
|
Оператор Кэнни дает лучшие результаты, чем Собеля, Прюитта, Робертса и Лапласиана Гаусса. Алгоритм EM дает стабильную сегментацию на различных типах изображений. OTSU показал хороший и стабильный эффект. Генетический алгоритм показал лучший результат на всех типах изображений.
Выводы
Эта статья сосредоточена в основном на сегментации изображений, используя самые распространённые операторы. Связь между сегментацией изображений и распознаванием объектов в рамках операторов Собеля, Прюитта, Робертса, Кэнни, Алгоритма EM, Алгоритм OSTU и геетического алгоритма изучена. MATLAB 7.9. был использован для экспериментов. Алгоритм EM и алгоритм OTSU дали стабильный эффект сегментации.
Список использованной литературы
1. Iasonas Kokkinos, and Petros Maragos (2009),”Synergy between Object Recognition and image segmentation using Expectation and Maximization Algorithm”., IEEE Trans. on Pattern
Analysis and Machine Intelligence (PAMI), Vol. 31(8), pp. 1486-1501, 2009.
2. Wen-Xiong Kang, Qing-Qiang Yang, Run-Peng Liang (2009), “The Comparative Research
on Image Segmentation Algorithms,” First International Workshop on Education Technology
and Computer Science.
3. V. Ferrari, T. Tuytelaars, and L.V. Gool(2004), “Simultaneous Object Recognition and
Segmentation by Image Exploration,” Proc. Eighth European Conf. Computer Vision, 2004.
4. B. Leibe, A. Leonardis, and B. Schiele(2004), “Combined Object Categorization and
Segmentation with an Implicit Shape Model,” Proc. ECCV Workshop Statistical Learning in
Computer Vision, 2004.
5. Y.Ramadevi, B.Kalyani, T.Sridevi(2010), “ Synergy between Object Recognition and Image
Segmentation”, International Journal on Computer Science and Engineering, Vol. 02, No. 08,
2010, 2767-2772.
6. N.Senthilkumarn, R.Rajesh(2009), ”Edge Detection Techniques for Image Segmentation- A
Survey of Soft Computing Approaches”, IJRTE, vol1,No2, 2009 250-254.