
Реферат за темою випускної роботи
Зміст
- Вступ
- 1. Актуальність теми
- 2. Мета і задачі дослідження та заплановані результати
- 3. Огляд досліджень та розробок
- 4. Дослідження геометричних параметрів монорейкових тягових пристроїв при русі в заокругленні дороги
- 5. Розробка конструкції тягового пристрою монорейкового локомотива
- Висновки
- Перелік посилань
Вступ
Вугільна промисловість є однією з провідних галузей промисловості України. Перспективи розвитку народного господарства показують, що вугілля залишається одним з основних видів палива. Розвиток вугільної промисловості здійснюється в безперервній взаємодії з іншими галузями народного господарства, підприємств, які завжди пов'язані безліччю виробничих і соціально-економічних зв'язків з іншими підприємствами вугледобувного району басейну. Застосування підвісних монорейкових доріг у промисловості відомо більше 150 років [1]. Вони знаходять застосування в якості допоміжного транспорту на вугільних шахтах, оскільки забезпечують переміщення матеріалів і людей у виробках зі знакозмінним профілем.
Технічний прогрес у вугільній промисловості при підземному способі видобутку вугілля здійснюється на основі широкого впровадження прогресивної технології і розширення комплексної механізації очисних та підготовчих робіт. Однак, перехід на використання нової техніки і підвищення ефективності праці може бути досягнуто тільки в тих випадках, коли існуючі на шахті способи розкриття та підготовки шахтного поля, системи розробки пластів, здатні забезпечити сприятливі умови для сучасного відтворення підготовчих запасів вугілля, надземну роботу транспорту, ефективне провітрювання гірських виробок, а так само проведення заходів щодо боротьби з несприятливими чинниками.
1. Актуальність теми
Основними напрямками економічного і соціального розвитку України на даний час передбачається подальший розвиток цього способу видобутку вугілля, тим більше, що в силу особливостей вугільних родовищ найцінніші вугілля добуваються практично тільки підземним способом. За цим вдосконалення технологій підземного видобутку вугілля, що забезпечує високу ефективність виїмки вугілля, раціональне використання запасів і безпеку робіт, надається першорядне значення.
Одну з важливих ролей грають монорейкові дороги, що дозволяють знизити витрати на видобуток, зменшують трудомісткість гірських робіт і підвищують їх безпеку. Цьому питанню і присвячена ця робота. Використання таких транспортних засобів також і для перевезення гірників дозволяє відносно дешевим і легким способом збільшити ефективний час роботи бригади очисного забою і, отже, поліпшити за технічної та економічної точок зору використання високопродуктивного забійного обладнання.
На підставі перерахованих вище факторів можна говорити про актуальності застосування монорейкових підвісних доріг на підприємствах гірничої промисловості, а відповідно і про актуальність обраної теми магістерської роботи.
2. Мета і задачі дослідження та заплановані результати
Основною метою роботи є дослідження параметрів і розробка гібридного підвісної монорейкового локомотива для вугільних шахт.
Для досягнення зазначеної мети необхідно вирішити такі завдання:
– Скласти рівняння, що визначає тягову здатність;
– Встановити граничні маси вантажу монорейковим локомотивом вантажів;
– Дати рекомендації з вибору типу притискного механізму приводних коліс.
При вирішенні поставлених завдань прийняті такі припущення:
– Поїзд розглядається як матеріальна точка;
– Нормальні навантаження на приводні колеса не змінюються в часі;
– Контакт приводних коліс постійний і їх фрикційні властивості незмінні.
3. Огляд досліджень та розробок
У зв'язку з переходом на нові технологічні схеми підготовки шахтних полів, концентрацією гірничих робіт і різким збільшенням навантаження на очисних забої внаслідок широкого застосування механізованих комплексів на шахтах зростає роль допоміжного транспорту для перевезення людей, матеріалів і устаткування.
Недостатня механізація допоміжного транспорту на шахтах країни пояснюється відсутністю серійно випускаються надійних і ефективних засобів допоміжного транспорту, різноманіттям доставляються матеріалів, великими витратами ручної купа на вантажно-розвантажувальних і транспортно-складських роботах (ПРТС роботах), а також відсутністю до недавнього часу узагальнених керівних матеріалів з питань проектування, експлуатації та безпеки цих робіт па підземному транспорті.
Інститутом ИГД ім. А. А. Скочинського спільно з ДонУГИ, Центро-гіпрошахтом, КНИГУ І, КузНІУІ, Южгіпрошахт, ВПІІГідроуглем, Укр-ніігідроуглем та Технічним управлінням Мінвуглепрому СРСР були розроблені Основні положення з проектування та експлуатації підземного транспорту вугільних шахт
, в яких викладені рекомендацій з вибору прогресивних схем і засобів допоміжного транспорту, дана область застосування різних видів і типів транспортного устаткування в різних гірничотехнічних умовах, наведено методику розрахунків необхідної кількості коштів допоміжного транспорту, а також основні положення з експлуатації та безпеки робіт.
ВНПО Вуглемеханізація
веде роботи по створенню засобів допоміжного транспорту матеріалів, устаткування і людей з поверхні до робочих місць.
Вивченням, аналізом і модернізацією допоміжного транспорту на шахтах колишнього Радянського займалися Союзу А. А. Ткаченко, О. Б. Єненко, В. В. Бухановський [2].
У своїй статті вони пишуть, що дороги типу ДМК користуються великим попитом па шахтах, включені в якість основного транспортного засобу для доставки матеріалів, устаткування і людей по дільничним гірничих виробках в проекти більшості шахт-новобудов (Червоноармійська-Капітальна, Западную-Донбасская, Воргашорская та ін), а також в розроблені ИГД ім. А.А.Скочинського Технологічні схеми підземного транспорту виїмкових ділянках на вугільних шахтах (для пологих пластів з кутами падіння до 18°)
і в нові Технологічні схеми гірничо-підготовчих робіт на вугільних шахтах
.
В работі [3] наведено досвід експлуатації шахтних монорейкових доріг на шахтах Донбасу. Дослідження [4,5] присвячені проблемам кріплення підвісної монорейкового шляху в гірничих виробках шахт. У роботах [6,7] наведені питання, присвячені динаміці шахтного транспорту. Досвід застосування підвісних надґрунтових дизель-гідравлічних локомотивів для гірничих підприємств розглянуто в роботі [8].
4. Дослідження геометричних параметрів монорейкових тягових пристроїв при русі в заокругленні дороги
Розглянемо рух тягового пристрою по вертикальному закругленню, геометрична модель якого показана на рис.2.1. Прийняті наступні позначення: D, В – відповідно діаметр і ширина приводних коліс; Sб – жорстка база тягового пристрою; r – радіус ходових коліс; R - радіус кривизни закруглення; h, αн – відповідно ширина і кут нахилу поверхонь кочення для ходових коліс нижньої полиці монорейки; ε – відстань між вертикальною віссю симетрії тягового пристрою і віссю обертання приводного колеса; ΔR – відстань між нижньою і верхньою полицями монорейки.
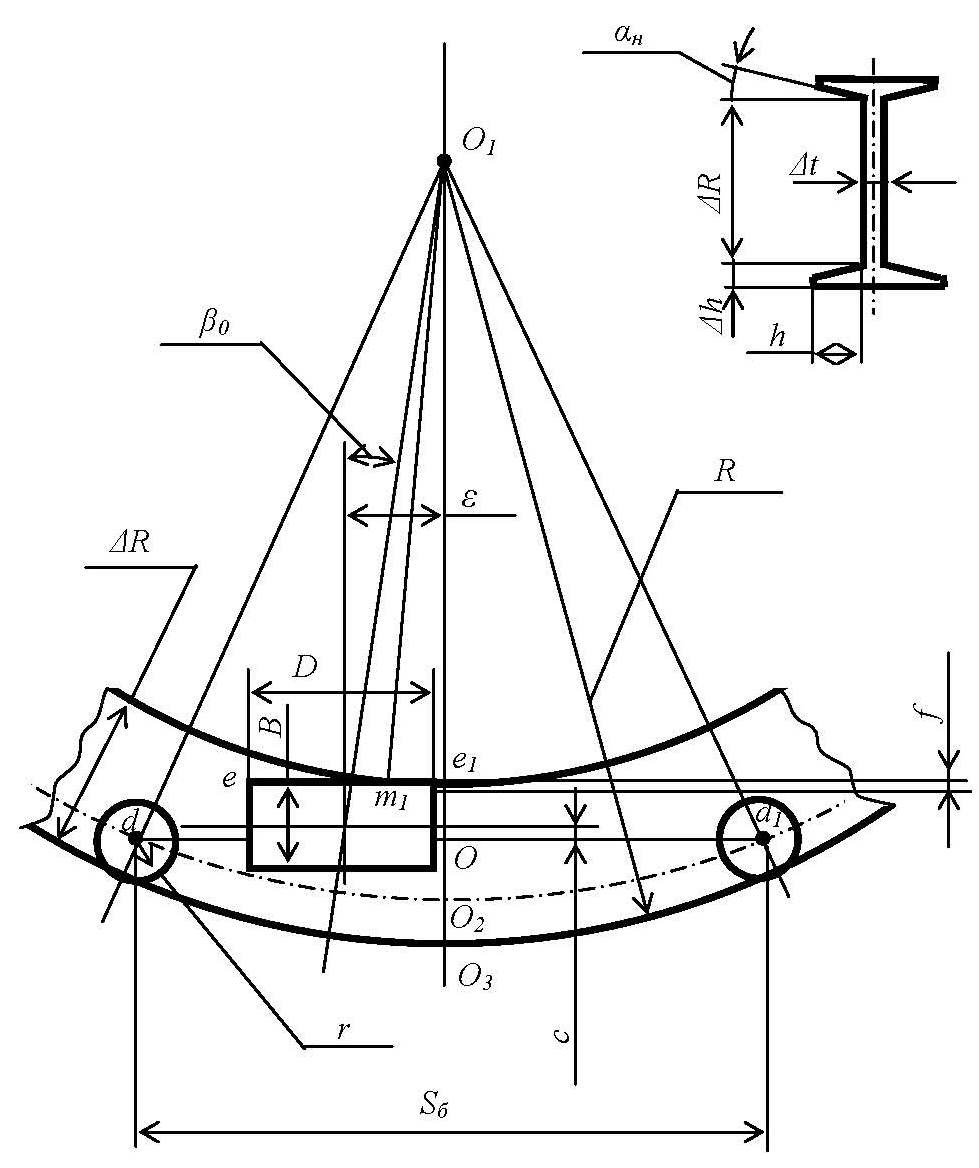
Рисунок 1 – Модель вписування тягового пристрою в закруглення
При русі в закругленні постійного радіусу R, приводне колесо зміщується від подовжньої осі монорейки на величину с і може обернутися відносно нормалі на кут β0. З'являється небезпека заклинювання між горизонтальними полицями і монорейками.
Визначимо умову, коли це може статися. Для цього проведемо допоміжну вісь ОО1, яка паралельна осі обертання приводного колеса і знаходиться на відстані ε.
Контакт приводного колеса об горизонтальні полиці можливий в точці m1. Для визначення координат цієї точки розглянемо переріз, паралельний самому колесу і що проходить через точки е и е1. У цьому перерізі (рис. 2) діаметр D і ширина h проектуються у натуральну величину. Товщина полиці монорейки біля місця сполучення з вертикальною стінкою tα уде в даному випадку більша і залежно від кута β
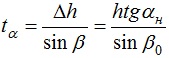 (1)
(1)
де Δh – товщина полиці монорейки в місці сполучення, м
Рисунок 2 – Схема розташування приводного колеса при перекосах (анімація: 5 кадрів, 5 циклів повторення, 424 кілобайт)
Розглянемо два прямокутні трикутники k1l1q1 і m1n1Ok. Оскільки вони утворені взаємно перпендикулярними прямими, то вони подібні. З теореми подібності виходить, що кут k1l1m1 дорівнює куту n1m1Ok. значимо ці кути як αа. Враховуючи, що відрізок m1Оk дорівнює радіусу приводного колеса, можемо знайти одну координату точки контакту
 (2)
(2)
Значення кута αа можна знайти з трикутника k1l1q1
 (3)
(3)
Оскільки трикутник р1m1q1 подібний до трикутника k1l1q1, то другу координату можна знайти як
 (4)
(4)
Звідси витікає, що точка контакту знаходиться від осі обертання приводного колеса на відстані
 (5)
(5)
і належить хорді, довжина якої рівна
 (6)
(6)
Складемо рівняння, що зв'язує геометричні параметри тягового пристрою і монорейки для увігнутого закруглення.
З трикутника ОО1d відстань між лінією зв'язку ходових коліс dd1 і центром кривизни закруглення О1 дорівнює
 (7)
(7)
З іншого боку
 (8)
(8)
де ƒ – стрілка сектора, м
 (9)
(9)
Підставивши значення ƒ, отримаємо умову відсутності заклинювання на увігнутому закругленні
 (10)
(10)
З вираження (7) можна знайти значення кута перекосу
 (11)
(11)
Підставивши в (11) значення (OO1), отримаємо
 (12)
(12)
Аналогічно можна знайти для опуклого закруглення
 (13)
(13)
 (14)
(14)
Розглянемо траєкторії руху приводних коліс по закругленнях, що складаються з прямолінійних відрізків.
При русі тягового пристрою, коли перша по ходу каретка входить на похилий відрізок монорейки увігнутого закруглення (рис. 3), а друга (що відстає) каретка ще знаходиться на горизонтальному, приводні колеса обертаються на певний кут β0 і зміщуються відносно подовжній осі монорейки на величину Cо. Заклинювання можна запобігти, якщо
 (15)
(15)
Кут перекосу β0, можна знайти з трикутника dd1q1.
Позначимо
 (16)
(16)
де li – шлях, пройдений першою ходовою кареткою по похилій ділянці монорейки, поки друга ще знаходиться на горизонтальній ділянці, м.
З рис. 3 видно, що кут повороту рами рівний
 (17)
(17)
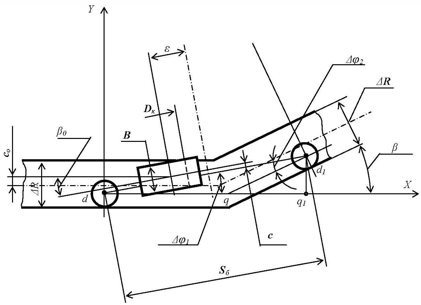
Рисунок 3 – Модель вписування приводних коліс в закруглення, що складається з прямолінійних відрізків
Враховуючи, що
 , (18)
, (18)
і підставивши в (18) значення li з (16) маємо
 (19)
(19)
Оскільки кут β є зовнішнім кутом трикутника dd1q, то
 (20)
(20)
де Δφ2 – кут повороту рами відносної похилої ділянки.
Отже, для приводних коліс, які знаходяться на горизонтальній ділянці, кут перекосу β0, дорівнюватиме Δφ1, а на похилому – Δφ2. При симетричному розташуванні приводних коліс відносно ходових кареток у момент проходження стику між цими відрізками кути Δφ1 і Δφ2 рівні між собою.
Знаючи кути повороту рами Δφ1 і Δφ2 можна визначити зміщення, що входить у формулу (15).
 (21)
(21)
У загальному випадку рівняння траєкторії руху центру приводних коліс буде
 (22)
(22)
Слід зазначити, що отримані закономірності для вписування в увігнуте закруглення, що складається з прямолінійних відрізків, справедливі і для геометричної моделі опуклого, оскільки приводні колеса аналогічно зміщуються і обертаються відносно монорейки на ті ж величини.
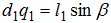
Розглянемо вписування в горизонтальні криві монорейкового шляху. Параметром, що визначає радіус закруглення, являється відхід приводних коліс від подовжньої осі тягового пристрою. Відхід може бути забезпечений або примусовим зміщенням, або поворотом навколо горизонтальної або вертикальної осей.
Знайдемо відхід від подовжньої осі тягового облаштування Δb. Згідно рис. 4 маємо
 (23)
(23)
де Rг – радіус закруглення в горизонтальній площині, м.
Рисунок 4 – Модель вписування приводних коліс в горизонтальне закруглення
На криволінійній ділянці відстань між осями обертання (O1O2) буде більше, ніж на прямолінійній ділянці, за рахунок відходу кожного колеса. Визначимо відхід колеса з центром О1 від вертикальної полиці монорейки
 (24)
(24)
де Δt – товщина вертикальної стінки монорейки, м.
Аналогічно для колеса з центром обертання О2 відхід рівний
 (25)
(25)
Кути Δγ1 і Δγ2можна знайти як
 (26)
(26)
 (27)
(27)
Тоді відстань між осями обертання приводних коліс при русі тягового пристрою по горизонтальному закругленню рівна
 (28)
(28)
де
Підставивши значення ƒ1 і ƒ2 у вираження (28) і спростивши його, отримаємо
 (29)
(29)
Представляє практичний інтерес коефіцієнт зміни міжосьової відстані, оскільки пропорційно його значенню збільшується зусилля притиснення приводних коліс, що не завжди допустимо. Цей коефіцієнт дорівнює відношенню міжосьових відстаней при проходженні закруглень і прямолінійних відрізків монорейкового шляху. Його можна визначити
 (30)
(30)
Слід зазначити, що при ε ≠ 0, лінії дії зусиль притиснення приводних коліс не співпадають, тому на монорейку діють навантаження, що призводять до його вигину. Вигин відбувається на дузі завдовжки
 (31)
(31)
Для випадку (рис. 5), коли приводні колеса встановлені на балансирах, відхід забезпечується їх поворотом відносно вертикальної осі. Чинником, що визначає вписування, являються кути σ1 і σ2, які в загальному випадку залежать від діаметру приводних коліс, радіусу закруглення, товщини вертикальної полиці монорейки, радіусу R0, відстані між осями повороту ходової каретки і платформи S0 жорсткої бази тягового облаштування Sб.
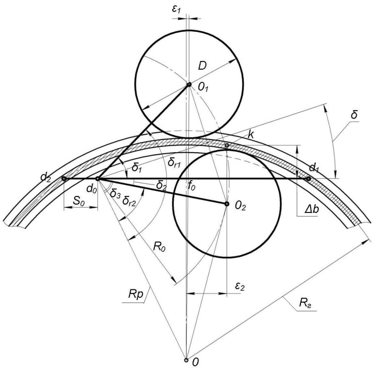
Рисунок 5 – Розрахункова схема зміщень приводних коліс на балансирах при русі по горизонтальних закрулениям
Кути σ1 і σ2 можна визначити як
 (32)
(32)
 (33)
(33)
де σr1 і σr2 – кути, утворені прямою Od0 і відповідними радіусами, проведеними в центри O1 и O2, ... °
σ3 – кут, утворений прямими (d1d2) і (Od0) ... °.
Позначимо відстань Оd0 через Rp, яке можна знайти по теоремі косинусів
 (34)
(34)
Розглянемо трикутники Od0O1 і Od0O2. Використовуючи теорему косинусів, знайдемо кути σr1 і σr2
 (35)
(35)
 (36)
(36)
З трикутника Оd0f0 виходить, що кут σ3 дорівнює
 (37)
(37)
Підставляючи значення кутів σr1, σr2 и σ3 у відповідні вирази (32) і (33), отримаємо
 (38)
(38)
 (39)
(39)
Використовуючи основне співвідношення для зворотних тригонометричних функцій, (38) і (39) можна записати
 (40)
(40)
де Li – відповідна відстань між центром обертання i- го приводного колеса і центром кривизни радіусу закруглення, рівне

Знак в цьому виразі перед (Δt + D)/2 залежить від розташування приводного колеса відносно подовжньої осі монорейки і приймається "+" – якщо центр обертання зовні закруглення, "-" – якщо усередині.
Знаючи кути повороту σ1 і σ2 легко знайти ексцентриситет кожного приводного колеса
 (41)
(41)
 (42)
(42)
Для визначення коефіцієнта міжосьової відстані kR приводної пари коліс, знайдемо відстань (О1О2) по теоремі косинусів
 (43)
(43)
Тоді можна записати
 (44)
(44)
Отримані рівняння, що описують процес вписування тягового пристрою, що відрізняються від відомих тим, що враховують кут нахилу робочих поверхонь кочення полиць монорейки, дозволяють довести аналіз впливу геометричних параметрів приводних коліс на радіуси закруглень.
5. Розробка конструкції тягового пристрою монорейкового локомотиву
Вписування тягового пристрою характеризується його геометричними параметрами, що визначають можливість руху по кривих(закругленням) і інших нерівностях монорейкового шляху без заклинювання.
До основних геометричних параметрів можна віднести: діаметр і ширину приводних коліс; жорстку базу тягового пристрою і радіус вписування. Взаємозв'язок вказаних параметрів багато в чому впливає на експлуатаційні якості тягового пристрою і, в цілому, монорейкового локомотиву.
Аналіз досліджень і публікацій по вписуванню рухливих одиниць монорейкових доріг не вирішують повною мірою питань, пов'язаних з процесом руху приводних коліс тягового пристрою у вертикальних і горизонтальних закругленнях, оскільки не враховують взаємозв'язок між параметрами монорейкового локомотиву і підвісного шляху, а також форму поперечного перерізу монорейки [2,9,10].
Мета розділу полягає в обґрунтуванні геометричних параметрів приводних коліс, їх розташування відносно монорейки і тягового пристрою при русі по трасах зі знакозмінним профілем.
Для досягнення поставленої мети вирішені наступні завдання: – знайдені траєкторії руху центрів приводних коліс для заданих кривих монорейкового шляху; – визначені зміщення і перекоси приводних коліс залежно від їх розмірів і параметрів тягового пристрою; – встановлені допустимі радіуси для закруглень.
Зазвичай монорейковий шлях промислових доріг виготовляють з двотаврового профілю. Оскільки заклинювання приводних коліс відбувається, головним чином, між полицями монорейки, при дослідженнях враховувалося похиле розташування поверхні кочення ходових коліс.
При складанні математичної моделі, що описує геометрію процесу проходження закруглень, прийняті наступні допущення: – форма приводних коліс – циліндрична; – деформації в місці контакту коліс з монорейкою не впливають на геометричні параметри руху; – монорейка є абсолютно жорстким тілом.
Прийняті допущення за своєю суттю не роблять істотного впливу, оскільки можливі деформації не перевищують допустимих відхилень для інженерних розрахунків.
Проектування тягового пристрою проводимо згідно модульного принципу. Модуль має два приводи з фрикційними колесами, які примусово притискуються до монорейки з обох його боків. Монорейковий локомотив може мати 1, 2 або 3 модулі.
Кожен привод має редуктор і електродвигун. Тягові колеса розміщуються по обидві сторони монорейки та розміщуються на рамі тягового пристрою з ходовими колесами. Як джерело енергії для руху використовується електродвигун крана.
Приймаємо електродвигун АИУК-160S6 з електромагнітними гальмами, який має номінальну кутову швидкість пдв= 980 об/мін, потужність Nдв = 11 кВт та редуктор 2Ц-100Н-НС, який має номінальну кутову швидкість вихідного вала пвих = 190 об/мін, максимальну потужність 15 кВт.
Встановимо максимальну швидкість тягового пристрою, якщо тягові колеса мають діаметр D = 0,406 м та В = 100 мм.

Згідно даних завода-виробника ВАТ Днепрошина
, максимальна сила притиснення тягових коліс може бути 8 кН. Якщо коефіцієнт зчеплення ψ = 0,45, то максимальне тягове зусилля буде

Максимальний обертаючий момент, який може реалізувати тягове колесо згідно конструктивній схемі, яка вказана на рис 6, буде

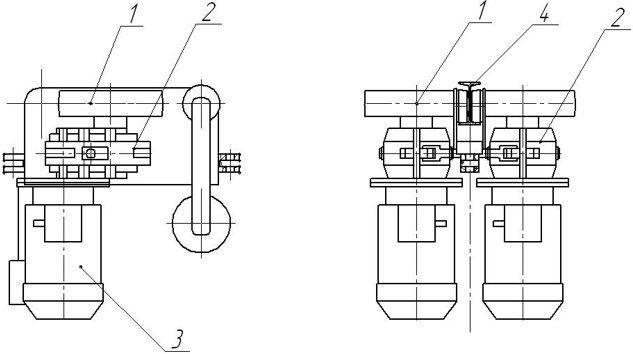
Рисунок 6 – Конструктивна схема тягового пристрою монорейкового локомотива: 1 – тягові колеса; 2 – редуктор; 3 – електродвигун; 4 – монорейка
Максимальний обертаючий момент, який може реалізувати прийнятий електродвигун

де η – коефіцієнт корисної дії редуктора, який дорівнює 0,95
Звідки бачимо, що привод має запас встановленої потужності. Коефіцієнт запасу дорівнює

Висновки
Для кращого використання потужності локомотиву, необхідно застосовувати не менше трьох рівнів зусилля притиснення приводних коліс до монорейки, кожен з яких повинен відповідати значенню маси вантажу.
Вплив параметрів вписування тягового пристрою на геометричні розміри приводних коліс неоднозначно. Аналіз показує, що при рівній жорсткій базі для тягового пристрою з симетричним розташуванням радіус вписування більший, ніж з ексцентриситетом. Так, при однаковій ширині приводних коліс, встановлених симетрично відносно ходових коліс, подоланний радіус закруглення на 10...15% більший, ніж для розташованих з ексцентриситетом 0,3 м і на 40.50%, чим з ексцентриситетом 0,5 м. При жорсткій базі 0,6...0,8 м і ширині коліс 100 мм, мінімальний радіус вписування може складати 8 м, а при жорсткій базі 1,0.1,2 м – 12 м.
З аналізу схем зміщення виходить, що при рухи по горизонтальних закругленнях виникають додаткові навантаження на приводні колеса, викликані їх відходом і збільшенням відстані між осями обертання. Якщо на прямолінійній ділянці вектори сил притиснення спрямовані по одній прямій, що проходить через осі обертання коліс, то на закругленнях – по різних прямих, що проходить через осі обертання кожного колеса і центр кривизни закруглення. За рахунок того, що напрями дії сил не співпадають, з'являється вигин монорейки. Виникаючі додаткові навантаження пропорційні коефіцієнту зміни міжосьової відстані, який залежно від радіусу закруглення і параметрів тягового пристрою змінюється від 1,0 до 1,6. Значення коефіцієнта визначає додатковий опір при русі в кривих, викликане збільшенням навантажень на приводні колеса, що необхідно враховувати при проектуванні монорейкових локомотивів і в тягових розрахунках.
Перелік джерел
- Palmer Henry R. Palmer's Description of a Railway on a New Principle; Observations on Railways // Henry R. Palmer. – London: J. Taylor, 1823. – 60 p.
- Петренко О.С. Подвесные рельсовые дороги // О.С. Петренко. – М.: Машиностроение, 1981. – 272 с.
- Ширин Л.Н. Оценка эксплуатационных параметров подвесных монорельсовых дорог // Л.Н. Ширин, Л.Н. Посунько, В.А. Расцветаев / Геотехнічна механіка: Міжвід. зб. наук. праць / Ін-т геотехнічної механіки ім. М.С. Полякова НАН України. – Дніпропетровськ, 2008. – Вип. 76. – с. 91–96.
- Кузнецов Е.В. Метод выбора параметров сталеполимерных анкеров для подвески монорельсовых дорог большой грузоподъёмности в выработках // Е.В. Кузнецов / Вестник КузГТУ, №4, 2005 – с. 27-28.
- Расцветаев В.А. Особенности формирования дополнительных нагрузок на арочную крепь участковых выработок с подвесными монорельсовыми дорогами // Науковий вісник НГУ, №4, 2011 – с. 35-38.
- Гутаревич В.О. Динамика шахтных подвесных монорельсовых дорог: монография // В.О. Гутаревич. – Донецк: ЛАНДОН-ХХІ, 2014. – 206 с.
- Gutarevych V. Dynamic model of movement of mine suspended monorail // Transport Problems. International scientific journal, Vol.9, Iss.1, 2014 – p. 13-19.
- Баус-Нойфанг Б. Подвесные и напочвенные дизель-гидравлические локомотивы для перемонтажей механизированных комплексов «тяжелого» класса // Б. Баус-Нойфанг, Д.В. Великанов, Ю. Русинек / Уголь, №2, 2011 – с. 19-21.
- Проектування та конструювання транспортних і підйомних машин та комплексів // Під ред.В. О.Будішевського. – Донецьк: Норд-прес, 2009. – 599 с.
- Веткин А.С. Вписування локомотивів у вертикальні закруглення монорейкових шляхів // Гірські, будівельні і дорожні машини – Вып. 35 – Киев, 1983. – с. 73-76.