Математическая модель вектора внешнего возмущения на аксиальной коронке проходческого комбайна
Автор:А. К. Семенченко, О. Е. Шабаев, Д. А. Семенченко, Н. В. Хиценко
Источник: Неделя горняка – 2005 семинар 378–383 с.
Аннотация
А. К. Семенченко, О. Е. Шабаев, Д. А. Семенченко, Н. В. Хиценко – Математическая модель вектора внешнего возмущения на аксиальной коронке проходческого комбайна. Составление математической модели вектора внешнего возмущения исходя из схемы нагружения на исполнительном органе.
Общая постановка проблемы
Технический уровень и эффективность работы проходческих комбайнов в значительной степени определяются параметрами коронки исполнительного органа и его привода.
Необходимость обеспечения высокойконкурентоспособности отечественныхпроходческих комбайнов делает актуальной задачу выбора на стадии их созданияи модернизации оптимальных параметроваксиальной коронки, которой в настоящеевремя оснащаются многие комбайны. Успешное решение этой задачи может бытьдостигнуто на основе математической модели оптимизации режимных и конструк-тивных параметров коронки позволяющейшироко использовать компьютерные технологии проектирования.
Следует отметить, что изученностьформирования вектора внешнего возмущения, обуславливающего динамическуюнагруженность комбайнов, удельные энергозатраты на разрушение, а следовательнопроизводительность и надежность машины, нельзя признать достаточной. Существующие методики задания вектора внешнеговозмущения не учитывают пространственного характера стружкообразования, а такжеизменения кинематических параметров резцов.
Это обуславливает необходимость разработки математической модели формирования вектора внешнего возмущения нааксиальной коронке при ее взаимодействии с разрушаемым массивом во всех воз-можных режимах работы.
Задание вектора внешнего возмущения
Для задания вектора внешнего возмущения требуется разработка математической модели определения толщины и ширины среза и изменений кинематическихзадних и боковых углов резцов аксиальной коронки, в процессе разрушения массива. При разработке этой модели былиприняты следующие исходные положения:
- толщина среза резца определяетсякак расстояние до поверхности разрушаемого массива, формируемой резцамиопережающей лопасти в сечении забояплоскостью, проходящей через вершинурезца и ось вращения коронки;
- ширина среза резца определяется как расстояние между вершиной резца и вершиной опережающего резца(находящегося на соседних линиях резания) в сечении забоя плоскостью проходящей через его вершину и ось вращения коронки.
С учетом принятых положений была разработана расчетная схема для определения параметров среза и кинематических изменений углов резцов аксиальной коронки(рисунок).
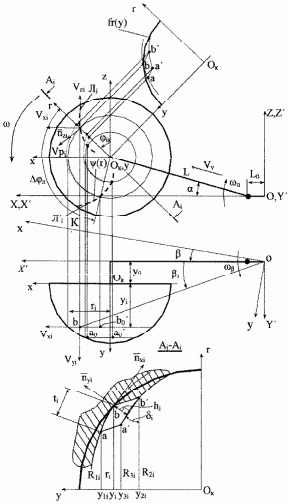
На схеме показаны:
ОXYZ – неподвижная система координат, жестко связанная с забоем;
ОX,Y,Z, – неподвижная система координат, совпадающая с положением системы ОXYZ при ее повороте вокруг оси ОZ на угол поворота стрелы в горизонтальной плоскостиβ;
Оkxyz – система координат жестко связанная с осью вращения коронки, оси которой параллельны осям системы координат ОX,Y,Z,;
Аi – Аi – сечение забоя, в рассматриваемой момент времени, плоскостью, проходящей через вершину i-го резца и ось вращения коронки;
Оkyr – система координат, задающая положение i-го резца и резцов формирующих поверхность забоя в сечении аi – аi и определяющих его параметры среза;
Лi – лопасть на которой установлен i-й резец и опережающий резец в соседней линии резания;
Л,i – опережающая лопасть, на ко-торой установлены резцы, формирующие поверхность забоя для i-го резца в сечении >Аi – Аi
а0 и а0,,b0, – положения в рассматриваемый момент времени вершины опережающего резца и резцов, формирующих поверхность забоя для этого резца
а и а,,b, – положения вершин резцов, формирующих поверхность забоя для i-го резца в сечении АI – АI
ri,R1i,R2i,R3i и yi,y1i,y2i,y3i – координаты вершин i-го резца и резцов формирующих поверхность забоя в сечении Аi – Аi
hi, ti и δi – толщина, ширина среза i-го резца и угол наклона поверхности забоя к оси оr в сечении Аi – Аi
Δαxi, Δαyi, Δαzi – кинематическое уменьшение соответственно бокового, заднего и переднего углов i-того резца
nxi, nyi, nzi – единичные векторы противоположно направленные составляющим усилия резания на i-м резце(соответственно боковой, по задней грани и силы резания);
φi и Δφл – углы положения i-го резца на к-ой лопасти и угол сдвига лопастей коронки:ψ(r) fr(y) – зависимости для задания боковой поверхности коронки и углов смещения резцов на лопастях;
α, β – угол подъема стрелы и ее поворота в горизонтальной плоскости в рассматриваемый момент времени
Vv и ω,ωα,ωβ – скорость выдвижения стрелы и, соответственно, угловые скорости вращения коронки и поворота стрелы в вертикальной и горизонтальной плоскостях;
Vp и Vxi, Vyi, Vzi – скорость резания и состав-ляющие скорости подачи i-го резца в системы координат ОX,Y,Z,, в рассматриваемый момент времени.
С учетом расчетной схемы была разработана математическая модель определения параметров реза и кинематических изменений углов резцов аксиальной коронки.
В интегрированном виде эта модель может быть представлена
где
Yp=(hi,ti,Δαxi,Δαyi,Δαzi, nxi, nyi, nzi,i=1,Ni) – выходной вектор параметров процесса разрушения массива резцами лопасти аксиальной коронки;
Fp – вектор функция определения параметров процесса разрушения массива резцами лопасти аксиальной коронки;
Xp(YCH,R) – входной вектор, компонентами которого являются схема набора коронки YCH и вектор параметров режима ее работы R (L,α,βω,VV,ωα,ωβ);
PСП – вектор параметров системы подачи исполнительного органа.
Зависимости для определения параметров режима работы аксиальной коронки(составляющие вектора R) для различных технологических операций и зон разрушения массива приведены в таблице.
При известных значениях скорости подачи исполнительного органа Vп, высоте фрезерования Н, величины расстоя-ния до боковой поверхности выработки Вз на высоте ΔН от продольной оси комбайна, величины заглубления коронки вдоль го-ризонтальной оси выработки Вз, шаге фрезерования ?Н и числе положений коронки для описания технологических операций Ns, значение параметров необходимое для определения составляющих вектора R определяются по зависимостям(2)

Исходными данными определения вектора внешнего возмущения, формируемого на аксиальной коронке при разрушении массива, является: вектор параметров разрушения массива резцами лопасти коронки определяемый с использованием математической модели(1, 2); вектор составляющих усилий резания на резцах лопасти число лопастей на коронке Nз.

При известной величинеm(номера прослойка разрушаемого резцом) значения составляющих усилий резания на резцах определяются по зависимостям:

где
PXni, PYni, PZni – соответственно боковое усилие, сила подачи и сила резания на i-том резце лопасти при n-том положении коронки по углу ее поворота;
fxm(Yp), fym(Yp), fzm(Yp) – зависимости определения составляющих силы разрушения Ppni для прослойка массива разрушаемого резцом.
В интегрированном виде математическая модель определения вектора внешнего возмущения и его основных параметров как ФЗЭ запишется:
Модели(1, 2, 3) позволяют определить составляющие вектора внешнего возмущения, его основные характеристики в различных режимах работы коронки и может быть использована для анализа влияния параметров коронки на эффективность работы исполнительного органа и обоснования его рациональных параметров.
Выводы
Разработана математическая модель определения параметров вектора внешнего возмущения, формируемого на исполнительном органе с аксиальными коронками в различных режимах его ра-боты при обработке проходческого забоя. Модель представляет совокупность следующих взаимно увязанныхматематических моделей:
- разрушаемого массива и поверхности забоя в различных режимах его обработки для оценки контактирования резцов с этим массивом;
- определения параметров процесса разрушения массива резцами коронок;
- определения параметров вектора внешнего возмущения, действующего нааксиальные коронки при разрушении массива.
Разработанная математическая модель определения параметров процесса разрушения массива аксиальнойкоронкой позволяет определять толщину и ширину среза на резцах, а такжекинематические изменения углов резцов и единичные векторы, противоположно направленные составляющимсил резания на резцах, для различныхрежимов работы исполнительного органа при различных положениях коронокпо углу поворота по известным параметрам схемы набора режущего инструмента и системы подачи исполнительного органа.