Стереосъемка, проводимая цифровыми камерами, имеет ряд преимуществ: оперативное получение цветных изображений без фотолабораторных работ, возможность загрузки их в память компьютера, визуализации и измерений на экране монитора. Однако специальные цифровые камеры высокого разрешения, предлагаемые для целей фотограмметрии, весьма дороги, что затрудняет их широкое применение. Поэтому во многих случаях представляются целесообразным использование более дешевых камер, позволяющих, тем не менее, решать многие задачи стереосъемки.
Цифровая камера Kodak DC210+ не предназначена для измерительных целей, но более доступна по цене, чем специальная аппаратура. С ее помощью можно, например, провести геологическое документирование стенок котлована под крупное инженерное сооружение. Такая работа обычно требует привязки фотоизображений к определенной системе координат, поэтому на объекте проводится фототеодолитная съемка с обработкой снимков на стереоавтографе. В качестве эксперимента эта съемка была частично продублирована съемкой камерой Kodak DC210+ для получения крупномасштабных цветных ортоизображений с нанесенной на них координатной сеткой.
Работа по съемке цифровой камерой и фотограмметрической обработке снимков была проведена на базе лаборатории аэрокосмических методов географического факультета МГУ при содействии заведующего лабораторией доктора географических наук, проф. Ю. Ф. Книжникова.
Для измерения цифровых изображений существуют различные системы, решающие комплекс топографических задач. Однако стоимость большинства из них составляет 15‐30 тыс. дол. Нами для измерений были выбраны две значительно более дешевые системы отечественного производства: РНОТОМОD 1.52 фирмы “Ракурс” и KSK‐1 фирмы ИБИК. Первая – автоматизированная многофункциональная система, обеспечивающая, в числе прочего, получение ортоизображений, спроектированных на любую плоскость в выбранной системе координат. Вторая имитирует на экране монитора работу стереокомпаратора и позволяет автоматически записывать отсчеты со шкал в выбранный файл. Фактически – это единственная ее функция, но простота и невысокая стоимость устройства при наличии рабочих фотограмметрических программ делают ее весьма перспективной при решении задач, не требующих большого объема стерео измерений.
Для использования неметрической камеры в измерительных целях необходимо определить ее элементы внутреннего ориентирования, в том числе дисторсию. Для этого проведена калибровка камеры методом сравнения полученного ею снимка со снимком=эталоном того же объекта. Обе съемки выполнены с одной точки стояния при пространственном совмещении центров проекций снимков. Исследуемый снимок измерен посредством KSK‐1, эталонный (фототеодолитный) – на стерокомпараторе Stecometr, результаты этих измерений могут использоваться в целях калибровки неоднократно. Для данной камеры получено значение фокусного расстояния, равное 1788 пикселов. Дисторсия по всему полю изображения оказалась невелика и не превышала, как правило, 1‐1,5 пиксела. Это весьма важный вывод, означающий практическую возможность фотограмметрической обработки изображений, полученных данной камерой, без учета их геометрических погрешностей. Отметим, что калибровка проведена для режима Tele, принятого при съемках. Повторная калибровка после окончания работ показала хорошую стабильность элементов внутреннего ориентирования: изменения не превышали 1 пиксела.
При предварительном расчете точности построения модели следует учитывать, что она может вестись в двух вариантах: на основе уравнений компланарности, подобно обработке одиночных стереопар аэрофотоснимков, или с использованием условий коллинеарности. Последний вариант обычный для наземной стереосъемки, предполагает уточнение элементов ориентирования снимков с использованием геодезических данных.
Принимая в расчетах правую базисную систему координат, для первого варианта используем формулы
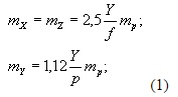
где mX, mY, mZ – средние квадратические ошибки координат точек модели; Y – отстояние точки; mp – средняя квадратическая ошибка измерений. f – фокусное расстояние камеры; р – продольный параллакс точки (три последние величины даются в пикселах).
Согласно исследованиям при данных размерах пиксела ошибка измерения близка к 0,4, Тогда, принимая f = 1800, р = 450, тp = 0,4, согласно (1) получаем

Однако надо иметь в виду, что этот вариант обработки не следует применять, если длина фокусного расстояния значительно превышает размер кадра снимка. В этом случае точность определения элементов взаимного ориентирования становится недостаточной для надежного построения модели. На основании имеющегося опыта можно принять, что примерное соотношение фокус/кадр не должно быть более 1,5.
При обработке по второму варианту (с использованием условий коллинеарности) для оценки точности применим формулы наземной стереофотосъемки

Принимая mx=my=mz=0,4; x/p=z/p=1, получим
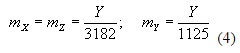
Из (2) и (4) следует, что ожидаемые ошибки в плоскости XZ в первом и втором вариантах обработки близки к 1 : 2000 и 1 : 3000 отстояния соответственно. Ошибки по отстоянию в обоих вариантах близки к 1 : 1000. Однако это чисто теоретический расчет, не учитывающий предела разрешения цифровых изображений, о чем будет сказано ниже.
Первый вариант построения модели может быть использован при съемке склона с близкого расстояния, когда вся площадь стереопары заполнена изображением объекта и является рабочей, и элементы взаимного ориентирования определяются на основе уравнений компланарности и поперечных параллаксов. Этот вариант дает возможность детального описания участка склона. Второй вариант – наземная стереофотосьемка в обычном ее понимании, когда рабочая зона стереопары зачастую занимает относительно узкую горизонтальную полосу, а для точного ориентирования снимков необходимо привлечение геодезических данных. Точность этого варианта при отстояниях 150-250 м в большинстве случаев достаточна для построения планов масштаба 1 : 1000 и более мелких, а также профилей склонов, превышений и т.д.
Разрешающая способность цифровых снимков должна обеспечивать изображение всех необходимых деталей объекта. Это разрешение определяется соотношением Y : f, где f дается в пикселах. Для данной камеры при f = 1800 можно принять разрешение как 1 : 2000 отстояния. Из этого следует, что разрешение изображения будет на порядок меньше, чем у фотоснимков. Поэтому для отображения мелких деталей, например до 1 см, отстояние не должно превышать 20 м. Съемка с таких отстояний связана иногда с большим числом стереопар, необходимых для покрытия всего объекта. Полевая геодезическая подготовка их может быть весьма затруднена, поэтому в таких случаях целесообразно применение ступенчатой съемки. Первой ступенью является съемка с относительно больших расстояний, когда объект умещается на небольшом числе стереопар. Эти базисы обеспечиваются геодезически, аналогично фототеодолитной съемки. Вторая ступень – ближняя съемка, проводимая без всякой геодезической подготовки и без измерения длин базисов. Для снимков первой ступени применяется второй вариант камеральной обработки, понятие которого дано выше. Снимки второй ступени обрабатываются по первому варианту, причем геодезической опорой для них служат точки связи со стереопарами первой степени.
По этому принципу и была выполнена съемка на нашем объекте. Первой ступенью служили три базиса с отстояниями 150‐170 м и длиной 40 м. Геодезическая подготовка включала определение координат концов базисов и двух-трех контрольных точек на стереопару. Съемка второй ступени включала 12 относительно небольших базисов с отстоянинми 5‐20 м без каких-либо геодезических измерений, сама съемка велись просто с руки
и была выполнена в кратчайший срок. На этих снимках получены крупномасштабные изображения склона котлована со всеми необходимыми подробностями. Для всех базисов выдерживалось их отношение к отстояниям примерно 1 : 4. Для увеличения продольного перекрытия и полезной площади стереопары использовалась конвергенция снимков около 10° причем достигалась она за счет правого снимка, левый ориентировался примерно параллельно склону. Применялась и наклонная съемка, когда необходимо было захватить верх склона, не умещавшийся в кадре.
Фотограмметрическая обработка стереопар проводилась в два этапа. На первом этапе посредством KSK-1 измерялись стереопары дальней
съемки с обработкой по программе FSM, учитывающей одновременно условия коллинеарности и компланарности. В число измеряемых точек входили связующие с ближними
стереопарами, а также пикетные точки, используемые для обрисовки контуров бровок и построения профилей склона. Эти элементы ситуации были обрисованы посредством программы SURFER. На втором этапе велась обработка ближних
стереопар. Для этого использовалась система РНОТОМОD, а опорными служили точки связи с дальними
стереопарами. В данном случае, используя возможности системы, на участки склонов строили цветные ортоизображения с нанесенной на них сеткой координат. Эти изображения были итоговыми документами фотограмметрической обработки, на которые по результатам геологического дешифрирования наносилась основная ситуация, привязанная таким образом к координатной системе.
Оценка точности полученных результатов проведена на основе расхождений координат на опорных точках и точках связи между моделями. В пределах трех дальних
стереопар было 7 наведений на опорные точки и 9 на общие точки связи. Все расхождения были одного порядка, поэтому 16 точек объединены в общую группу, и по ним можно в определенной степени судить о точности модели, построенной при отстояниях 160 м. Средние квадратические расхождения по осям X, Y, Z составили соответственно 11, 14, 11 см или 1 : 1454. 1 : 1143, 1 : 1454 среднего отстояния. Следует отметить, что в данном случае направление осей координат геодезической и фотограмметрической базисной систем практически совпали.
Средние квадратические ошибки по оси Y согласуются с предвычисленными по формулам (4), если учесть, что расхождения на большинстве точек являются суммарной ошибкой на двух моделях. Но ошибки по осям X и Z больше предвычисленных и с учетом влияния двух моделей близки к 1 : 2000. Объяснение этому следует искать, по‐видимому, во влиянии предельного разрешения цифрового изображения, о чем говорилось выше. Разрешение для использованной камеры по осям X и Z также близко к 1: 2000, что и сказывается на конечной ошибке. Надо сказать, что влияние разрешения на ошибки по осям X и Z может существенно отличаться влияния его на ошибки по оси Y. Это связано с тем, что измерения по первым двум осям провидятся, по сути, монокулярно, в то время как при измерениях по оси Y вступают в действие законы стереоскопического восприятия. Но все это требует специальных исследований и выходит за рамки настоящей статьи.
Оценка точности произведена также по расхождениям между общими точками и ближних
стереопар с отстояниями 5‐7 м. Для этих точек (их число 17) средние квадратические ошибки по тем же осям составили 14, 13 и 11 мм. С учетом суммарного влияния двух моделей эти величины следует разделить на √2, тогда полученные ошибки одной модели при отстояниях 5‐7 м будут 8‐10 мм. Это примерно в два раза больше, чем следует из формул (2), но объясняется прежде всего невозможностью с большей точностью идентифицировать на двух изображениях детали объектов, границы которых в пространстве размыты
на величины, сопоставимые с ошибками измерений. Подтверждением тому является оценка точности проведенная по стереопаре ближней съемки фасада здания, отстояние съемки – 5 м. Измерения изображений проведены на обеих использованных нами системах и получены похожие результаты. В плоскости XZ измерены длины 18 отрезков между четкими контурами и сравнены с непосредственными промерами рулеткой. Получено среднее квадратическое расхождение 4,3 мм. Так как это суммарное влияние ошибок на двух концах отрезка, то получаем ошибку для одной точки, равную 3 мм. Это достаточно близко к результату расчета по первой из формул (2).
Конечно, проведенные оценки не являются в полной мере строгими, так как систематические ошибки деформации здесь выявляются лишь частично, но они достаточно характеризуют случайные ошибки и ту точность, которую можно в целом ожидать от данного метода съемки.
Таким образом, проведенная работа показала возможность использования для наземной стерефотосъемки неспециальных цифровых камер массового производства. Исследованные нами экземпляры показали достаточную ортоскопичность. Разрешающая способность цифровых изображений и точность, получаемая при их фотограмметрической обработке, уступают соответствующим показателям традиционных методов. Но преимущества цифровой съемки, о которых говорилось в начале статьи, а также применение более легкой аппаратуры и решение вопроса измерений на базе персональных компьютеров вместо громоздких и дорогих оптико‐механических устройств дают основание для использования их во многих случаях прикладной фотограмметрии.