Апостериорная
оценка точности определения вектора состояния земного наблюдателя по измерениям
дальности и скорости системы космической навигации GPS
Автор:
Д.А. Тучин
Источник: ИПМ им.
М.В.Келдыша РАН - Москва, 2002,
http://www.keldysh.ru/papers/2002/prep30/prep2002_30.html
Аннотация
Работа
проведена в рамках исследований по созданию автономной системы навигации на
борту космического аппарата с использованием спутниковых радионавигационных
систем GPS/ГЛОНАСС. Исследованы источники ошибок измерений псевдодальности на
C/A коде. Проведено сравнение априорной точности измерения псевдодальности с ее
фактическим значением. Приведены априорные оценки точности определения вектора
положения покоящегося наблюдателя.
Введение
В Институте
прикладной математики ведутся работы по созданию Автономной Системы Навигации
космического аппарата (АСН КА), обеспечивающей определение параметров движения
КА на всех этапах полета с использованием спутниковых систем GPS и ГЛОНАСС.
Основным принципом создаваемой системы является непосредственное использование
измерений дальности (псевдодальности) и скорости (псевдоскорости) на интервале
времени для определения параметров движения КА, в отличие от существующих
систем, использующих вектора состояния, полученные по одномоментной схеме.
Для построения надежных алгоритмов АСН и
моделирования их работы на борту КА проведен анализ источников ошибок измерений
и построена статистическая модель ошибок измерений псевдодальности.
Малая информационная база измерений
псевдодальности и псевдоскорости бортовых GPS/ГЛОНАСС-приемников заставила
использовать для построения моделей измерения наземных геодезических станций.
Для проведения вычислительных экспериментов были использованы измерения трех
станций, которые регулярно публикуются в сети Internet. Станции оснащены
различными типами приемников и расположены на разных широтах.
1.
Источники ошибок измерений псевдодальности
1.1. Модель
измерения псевдодальности на C/A коде
Передатчики НКА GPS излучают два непрерывных
сигнала на частотах L1 и L2. GPS-приемник может принимать сигналы L1 на
частоте и модулировать псевдослучайный
C/A код. Кодовое измерение псевдодальности на C/A коде (Coarse Acquisition
Code) есть результат сравнения генерируемой приемником псевдошумовой С/A
последовательности и принимаемого кода.
НКА генерирует псевдошумовую
C/A-последовательность синхронно с метками бортового времени. Уход бортового
времени относительно системного передается в эфемеридных сообщениях. Поэтому
временной сдвиг между принятой и
сформированной в приемнике последовательностями с точностью до начальной фазы
сформированной последовательности определяет время прохождения сигнала от НКА.
2.
Эфемеридная ошибка
Расчет вектора состояния НКА производится с
помощью привязанного к эпохе прогноза эфемеридных данных, передаваемых с борта с дискретностью 7200
секунд [1]. Ошибка в определении вектора состояния НКА или эфемеридная ошибка вызваны
неточностью аналитической модели движения НКА, используемой в системе и
описанной в интерфейсном документе [3], а таже неточностью прогноза параметров
в рамках этой модели. Точность и достоверность передаваемых с НКА эфемеридных
данных зависит также и от времени, прошедшего от начала эпохи.
Для статистической оценки эфемеридной ошибки были
взяты эталонные векторы положения НКА GPS с дискретностью 15 минут. Эти векторы
положения получаются в ходе решения обратной задачи по уточнению орбиты НКА на
основе измерений базовой сети, состоящей из около 600 точно привязанных
GPS-станций и доступны на ftp-сервере NASA
(ftp://igscb.jpl.nasa.gov/igscb/product ).
Был проведен анализ двухгодичной эфемеридной базы
и базы точных векторов положений. В результате были получены статистические
характеристики ошибок определения вектора положения и скорости НКА по штатным
эфемеридным данным. В таблице 1.3. показано возрастание ошибки определения
вектора положения и скорости НКА по
штатным эфемеридным данным в зависимости
от времени прошедшего от начала эпохи.
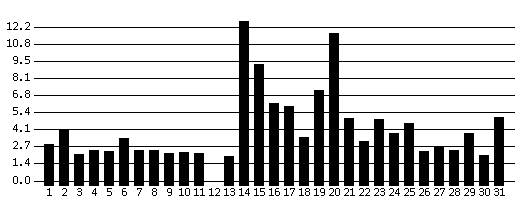
Рисунок 2.1. СКО расхождения штатных эфемерид с эталоном [м].
3. Статистическая модель ошибок измерений псевдодальности
Определенные таким образом невязки
будем интерпретировать как аппаратные ошибки измерения псевдодальности.
Для определения невязок уточнялись два параметра: неизвестная фаза генерации C/A последовательности и точность
времени регистрации сигнала . Вектор положения наблюдателя являлся априорно
известным. Для более точного определения невязок использовались эталонные
эфемериды и значения ухода часов НКА, тем самым была устранена ошибка
эфемеридного и частотно-временного обеспечения.
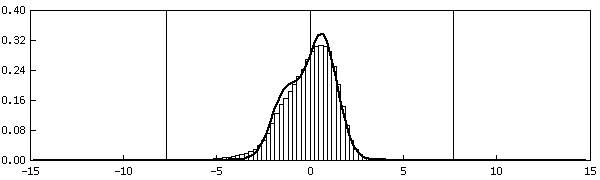
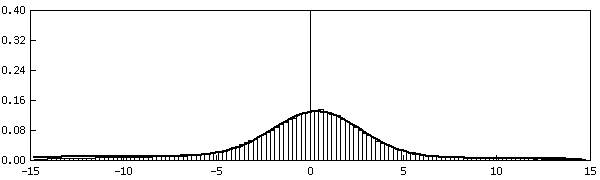
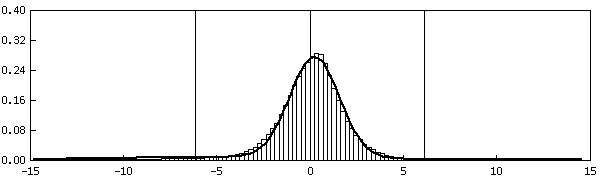
Рисунок 2.2.- Гистограмма и плотность распределения ошибок измерений псевдодальности а) bahr, б) cena, с) usno
Выводы
Точность определения
вектора состояния земного наблюдателя составляет
-точность штатного эфемеридного и
частотно-временного обеспечения является удовлетворительной и составляет ошибку
не более
-составляющая, вызванная эффектом распространения
радиоволн в ионосфере, имеет порядок
-тропосферная составляющая имеет порядок
-при проектировании АСН на борту КА необходимо
учесть ошибку, связанную с отражением радиосигнала.
Полученные точности определения вектора состояния
наземных приемников, будучи реализованными на борту, являются достаточными для
обеспечения навигации.
Список использованной литературы
1.Э.Л. Аким, Д.А. Тучин Апостериорная оценка
точности определения вектора состояния земного наблюдателя по измерениям
дальности и скорости системы космической навигации GPS, препринт Института
прикладной математики им. М.В. Келдыша РАН, Редакционно-издательская
группа,2001,№ 36.
2.Распространение радиоволн при космической связи
М.А. Колосов, Н.А. Арманд, О.И. Яковлев; Под ред. ак. Б.А. Введенского и проф.
М.А. Колосова. - М.: Связь, 1969. - 155 с.: ил.
3.Interface Control Document ICD-GPS-200-C
4.Глобальная спутниковая радионавигационная
система ГЛОНАСС / Под Г-52 ред. В. Н. Харисова, А. И. Перова, В. А. Болдина. —
М.: ИПРЖР, 1998. — 400 с. : ил.
5. Ивченко Г.И., Медведев Ю.И. Математическая
статистика: Учеб. пособие для втузов. — 2-е изд., доп. — М.: Высш. шк., 1992. —
304 с.: ил.