
Реферат за темою випускної роботи
Зміст
- Вступ
- 1. Актуальнiсть
- 2. Мета і завдання дослідження, плановані результати.
- 3. Розробка стенду
- 3.1 Вибір електродвигуна.
- 3.2 Вибір мікроконтролера
- 3.3 Вибір драйвера
- Список джерел
Вступ
У сучасному світі стан електрифікації промисловості та розвитку систем комплексної автоматизації показує, що їх основою є регульований електричний привід, який отримує все більш широке застосування в усіх сферах життя і діяльності суспільства - від промислового виробництва до сфери побуту.
Таку тенденцію можна простежити по швидкому розвитку технології 3D друку. З кожним днем технологія бере коріння від фрезерних ЧПУ все швидше вдосконалюється і стає доступнішим. Сьогодні на 3D-принтерах друкується майже все, можна надрукувати: макет будівлі або навіть саму споруду, їжу, металоконструкції, біопротези [1]. Також існує технологія здатна створювати живі людські тканини, заміщати життєво важливі органи і швидко заліковувати відкриті рани [2].
1. Актуальнiсть
З вищесказаного випливає, що для подальшого розвитку подібних технологій і освоєння їх «широкими масами», важлива дешевизна і якість обробки в подібних системах. І тут ключову роль відіграє управління електроприводу. У цієї випускний роботі для розробки моделі управління буде використовуватися ПЗ Matlab яке вже тривалий час використовується для моделювання різних промислових процесів автоматизації аж до робототехніки. Фізична модель містить крокові двигуни, які щодо сервоприводу дешевше, але в гіршій мірі управляються. Звідси випливає важливість підвищення точності управління крокового двигуна і підвищення ефективності електропривода в цілому, за допомогою доступного ПЗ Matlab в середовищі Simulink.
2. Мета і завдання дослідження, плановані результати.
Метою дослідження є розробка системи управління електроприводу механізму з двома ступенями свободи.
Основні завдання дослідження:
- Вибір електродвигуна.
- Вибір контролера і драйвера електроприводу.
- Реалізація фізичної моделі.
- Проектування математичної моделі в MATLAB
- Аналіз отриманих даних.
Для експериментальної оцінки отриманих теоретичних результатів і формування фундаменту наступних досліджень, в якості практичних результатів планується розробка Simulink-моделі електроприводу в програмі Matlab.
3. Розробка стенду
3.1 Вибір електродвигуна.
3.1 Вибір електродвигуна.
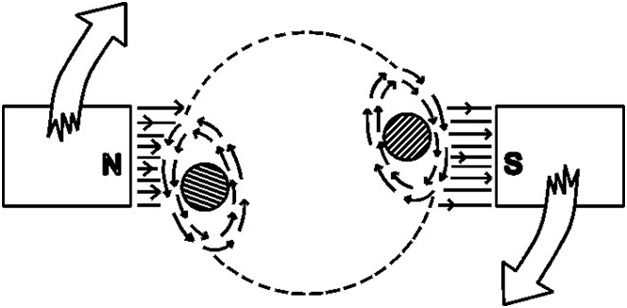
Кроковий двигун це електромеханічний пристрій, що перетворює електричні імпульси сигналів управління в кутові переміщення ротора (дискретні механічні переміщення) з фіксацією його в заданому положенні.
Кроковий двигун має можливість здійснювати точне позиціонування і регулювання швидкості без датчика зворотного зв'язку. Це більше підходить для систем, які працюють при малому прискоренні і з відносно постійним навантаженням. Якщо навантаження крокового двигуна перевищить його момент, то інформація про стан ротора втрачається і система вимагає базування за допомогою, наприклад, кінцевого вимикача або іншого датчика [3].
Малюнок 1 - Принцип роботи крокового двигуна
Переваги крокового двигуна:
- Стабільність. Може управляти широким діапазоном навантажень.
- Не вимагає зворотного зв'язку. Кут повороту закладений в конструкції двигуна.
- Щодо недорогогу по відношенню до інших систем контролю руху.
- Стандартизовані розмір рами і характеристики роботи.
- Технологія автоматичного підключення. Простий в установці і використанні.
- Безпечний. У разі будь-якої поломки відбувається автоматична зупинка двигуна.
- Тривалий термін експлуатації.
- Чудовий крутний момент на низьких швидкостях.
- Повторюваність. Повернення чітко до того ж самого положення.
- Захист від перевантаження. Двигун не може бути пошкоджений через механічне перевантаження.
Недоліки крокової двигуна:
- Низька ефективність. Двигун використовує значну енергію незважаючи на навантаження.
- Крутиться момент падає при збільшенні швидкості обертання (обертаючийся момент обернено пропорційний швидкості).
- Низька точність. 1:200 при повному навантаженні і 1:2000 при частковому навантаженні.
- Схильний до резонансу. Вимагає мікро-кроки для плавного руху.
- Пропущені кроки не відображаються.
- Низький крутний момент по відношенню до інерції. Не в силах швидко збільшувати навантаження.
- Двигун не буде набирати швидкість після миттєвої перевантаження.
- Гучний на середній і високій швидкості.
- Низька корисна потужність по відношенню до розміру і ваги.
Серводвигун - тип електромеханічних приводів, що не обертаються постійно, як крокові двигуни, а по сигналу переміщаються в певне положення і зберігають його, а за наступним сигналом переміщаються в інше положення.
У сервоприводах також використовується механізм зворотного зв'язку, тому він може обробляти помилки і при позиціонуванні їх виправити. Така система називається стежити. Таким чином, якщо якась сила тисне привід і буде змінювати його положення, то сервопривід буде застосовувати силу в протилежному напрямку і спробує виправити помилку. Це обумовлює високу точність позиціонування [4].
Малюнок 2 - Принцип роботы серводвигуна
Переваги серводвигунів:
- При малих розмірах двигуна можна отримати високу потужність
- Великий діапазон потужностей
- Відстежується положення, за рахунок використання зворотного зв'язку
- Високий крутний момент по відношенні до інерції
- Можливість швидкого розгону і гальмування
- При високій швидкості, високий крутний момент
- Допустима межа шуму при високих швидкостях
- Повна відсутнiсть резонансу і вібрації
- Точність позиціонування
- Широкий діапазон регулювання швидкості.
- Точність підтримки швидкості і стабільність крутного моменту.
- Високий статичний момент при нульовій швидкості обертання.
- Висока перевантажувальна здатність
- Малий час розгону і гальмування, високе
- Малий момент інерції двигуна, низька вага, компактні розміри.
Виходячи з вищевикладеного порівняння для реалізації робочого стенду був обраний кроковий двигун. З табл. 1 видно, що головною перевагою серво двигуна над кроковим двигуном є наявність зворотного зв'язку.
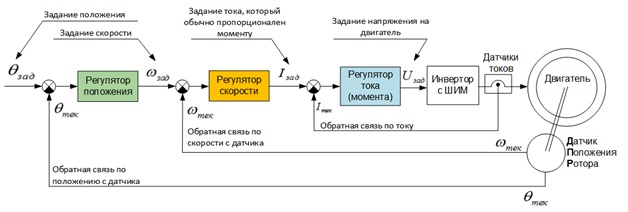
Малюнок 3 - Трьохконтурна система підпорядкованого регулювання [5]
Зворотній зв'язок дає великі можливості для управління двигуна, тому для максимальної компенсації даного недоліку планується використання режиму позиціонування (Мал). Це дозволить обмежувати кроковий двигун по швидкості, прискорення і току.
3.2 Вибір мікроконтролера.
3.2 Вибір мікроконтролера.
Для реалізації поставлених завдань необхідна чимала продуктивність мікроконтролера і сумісність з MATLAB. На основі цих критеріїв був обраний STM32F4Discovery.
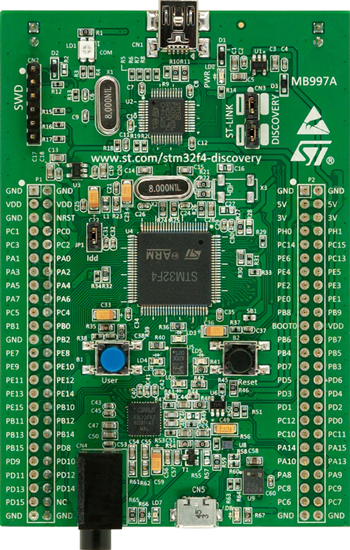
Малюнок 4 - STM32F4Discovery
В основі плати лежить мікроконтролер STM32F407VGT6 з ядром ARM Cortex-M4 і максимальною тактовою частотою 168 МГц, що дозволяє використовувати його в цифровій обробці сигналів і інших додатках, де необхідна максимальна швидкодія. Наявність 1 мегабайта флеш-пам'яті і 192 кбайт ОЗУ просто вражають. Присутня уся стандартна периферія, така як DAC, ADC, SPI, I2C, PWM, RTC. Також є підтримка USB хоста і Ethernet, є інтерфейс DCMI для підключення камери і SDIO для підключення SD карт, а також апаратний генератор випадкових чисел. Мікроконтролери STM32f4 відрізняються наявністю попередньо прошитого в них завантажувача. За допомогою цього завантажувача користувач завантажує свою програму в мікроконтролер без використання традиційних окремих апаратних программаторов і з'єднується з комп'ютером через USB-інтерфейс [6].
3.3 Вибір драйвера.
Як правило, логічні сигнали для управління кроковим двигуном формує мікроконтролер. Ресурсів сучасних мікроконтролерів цілком вистачає для цього навіть в самому "важкому" режимі - мікрошаговий.
Для підключення крокових двигунів через слабкострумові логічні сигнали мікроконтролерів необхідні підсилювачі сигналів - драйвери.
У функцію драйверів входить:
- забезпечення необхідного струму і напруги на фазних обмотках двигуна;
- комутація обмоток;
- включення;
- виключення;
- зміна полярності;
- захист комутуючих елементів від напруги самоіндукції обмоток [7].
Для забезпечення вищезгаданого функціоналу був обраний драйвер крокової двигуна L298n.
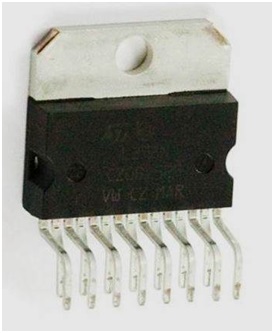
Малюнок 5 - Драйвер крокового двигуна L298N
L298N це повний мостовий драйвер для управління двонаправленими навантаженнями з струмами до 2 А і напругою до 46 В.
- Драйвер розроблений для управління компонентами з індуктивними навантаженнями, такими як електромагніти, реле, крокові двигуни.
- Сигнали управління мають TTL сумісні рівні.
- Два входу дозволу дають можливість відключати навантаження незалежно від вхідних сигналів мікросхеми.
- Передбачена можливість підключення зовнішніх датчиків струму для захисту і контролю струму кожного моста.
- Харчування логічної схеми і навантаження L298N розділені. Це дозволяє подавати на навантаження напругу іншої величини, ніж харчування мікросхеми.
- Мікросхема має захист від перегріву на рівні + 70 ° C.
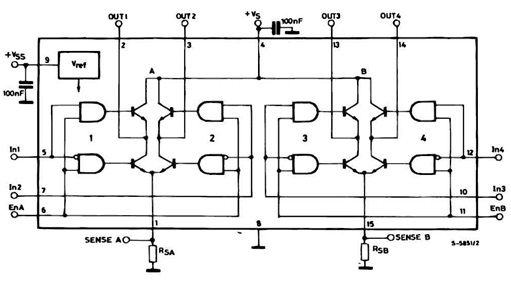
Малюнок 6 - Структурна схема L298N [8]
Зауваження
На момент написання даного реферата магістерська робота ще не завершена. Приблизна дата завершення: травень 2017 р. Повный текст роботи, а також матеріали по темі можуть бути отримані у автора або його керівника після вказаної дати.
Список джерел
1. Аддитивные технологии в машиностроении/ Зленко М.А., Попович А.А., Мутылина И.Н. Учебное пособие. - Санкт-Петербург, СПбГУ, 2013 - 6с.
2. 3Д печать органов [электронный ресурс] - Режим доступа: 3d-expo.ru
3. Кенио Т. — Шаговые двигатели и их микропроцессорные системы управления / Перевод с англ. М.: Энергоатомиздат, 1987. — 200 с.
4. Сервопривод [электронный ресурс] - Режим доступа: Википедия
5. Поддержание положения в сервоприводе: подчинённое регулирование vs шаговый режим [электронный ресурс], - Режим доступа geektimes.ru
6. STM32F4DISCOVERY [электронный ресурс] - Режим доступа: www.st.com
7. Драйверы шагового двигателя: униполярный, биполярный, L298N. [электронный ресурс] - Режим доступа: mypractic.ru
8. Программируемые роботы. Создаем робота для своей домашней мастерской/ Вильямс Дж. Пер. с анг. А. Ю. Карцева – М.: НТ Пресс, 2006. – 240с.