Основным элементом водопроводного узла, обеспечивающим подачу воды в промышленные и жилые районы городов, является подсистема подкачки – группа центробежных насосов, приводимых в движение асинхронными трехфазными двигателями. Задачей подсистемы подкачки является подача в магистрали определенного объема воды с давлением, не ниже некоторого требуемого, обычно определяемого необходимым давлением в самой верхней точке магистрали. Достижение требуемых расхода и давления может осуществляться несколькими путями: изменением положения задвижек непосредственно на выходном трубопроводе насоса или изменением частоты вращения крыльчатки насоса. В то время, как метод с использованием задвижек имеет низкий КПД и увеличивает износ запорного и насосного оборудования, метод с изменением частоты вращения крыльчатки лишен таких недостатков. Как правило, валы крыльчаток насосов связаны с роторами электродвигателей напрямую без понижающих или повышающих редукторов, что означает возможность изменения скоростей их вращения только лишь путем изменения скорости вращения ротора двигателя. И в этом случае применение асинхронных электродвигателей в качестве приводов дает преимущества в управлении и упрощает систему управления электронасосом.
Проанализируем подсистему подкачки и на её основе составим структурную схему автоматической системы управления. Питание электродвигателей осуществляется с локальной подстанции напряжением постоянной частоты и постоянной амплитуды, далее электродвигатели приводят в действие центробежные насосы таким образом, что те способны обеспечить максимальный требуемый напор и требуемый расход воды, причем последний является величиной переменной. В случае необходимости уменьшения подаваемых объемов воды используются задвижки на выходных водоводах. Для улучшения КПД подсистемы и уменьшения энергетических затрат следует отказаться от существующего способа поддержания гидравлических параметров и разработать систему, мощность которой будет изменяться динамически. Анализируя существующую систему видим, что при постоянном напоре на выходе следует управлять лишь расходом воды, т.е. частотой вращения крыльчатки насоса и как следствие – частотой вращения ротора привода насоса. Составим структурную схему системы автоматического управления на основе сделанных выводов:
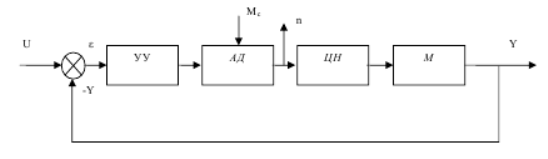
Рисунок 1 – Структурная схема системы автоматического управления расходом воды центробежного насоса
Система в целом состоит из управляющего устройства(УУ), получающего уставку U и влияющего на скорость ротора асинхронного двигателя(АД) и как следствие – на крыльчатку центробежного насоса(ЦН). Объем воды, перекачанный насосом, проходит некоторый промежуток по магистрали(М), после чего его величина снимается датчиком и в качестве обратной связи поступает на элемент сравнения, формируя сигнал рассогласования. Также следует учесть момент сопротивления ротора двигателя, который будет возмущающим воздействием в системе управления. Кроме того, для предотвращения аварийной ситуации целесообразно получать сведения о скорости вращения ротора двигателя, точнее – о его заклинивании.
Итак, в качестве выходной величины системы принят расход воды. Выберем входной параметр, или иначе – параметр, который будет отвечать за изменение скорости вращения ротора двигателя.
Как известно, скорость вращения ротора асинхронного двигателя зависит от частоты питающего напряжения:
где f1 – частота питающего напряжения, p – число полюсов, s – скольжение.
Исходя из этого выражения очевидно, что осуществлять управление скоростью ротора можно путем изменения частоты напряжения питания. Такое управление называется частотным и в последнее время получает широкое распространение. К тому же, широко выпускаются интеллектуальные частотные преобразователи, позволяющие не только изменять частоту напряжения, но также программировать в себя определенные законы управления, что может значительно упростить реализацию системы управления. Для выбора закона управления необходимо проанализировать передаточную функцию объекта относительно частоты питающего напряжения. Для этого определим передаточные функции каждого из звеньев.
Будем искать передаточную функцию асинхронного двигателя как отношение частоты вращения ротора к частоте питающего напряжения. Предлагается эту передаточную функцию разбить на две составляющих – «момент/частота» и «частота/момент» для возможности учета момента сопротивления, действующего на вал двигателя. Тогда структурная схема при управлении частотой напряжения статора будет выглядеть так:
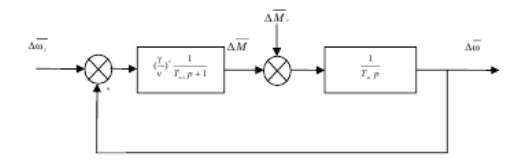
Рисунок 2 – Структурная схема асинхронного электродвигателя при управлении частотой питающего напряжения
По данной структурной схеме получим передаточную функцию по управляющему воздействию:

где ТМ –механическая постоянная времени двигателя, ТЭМ – электромагнитная постоянная времени двигателя, γ = U1α/U1αн – относительное напряжение статора(к номинальному), γ = Ω1/Ω1н – относительная частота напряжения статора (к номинальной).
Данная передаточная функция справедлива для случая, когда потокосцепление статора есть величина постоянная, т. е. одновременно с изменением частоты питающего напряжения изменяется и его величина в соответствии с выражением: U1α/ω1 = const. Следует отметить, что в современных преобразователях частоты реализован механизм поддержания постоянного потокосцепления, поэтому передаточная функция (1) может быть использована для описания АД.
Приведены выражения для вычисления постоянных времени функции (1), однако на практике проще получить их методами идентификации и использовать далее для получения передаточной функции регулятора.
Определим передаточную функцию центробежного насоса и магистрали. Как правило, на практике насос и магистраль рассматривают как один объект, и с определенной долей точности аппроксимируют общую передаточную функцию в виде инерционного звена второго порядка с запаздыванием. Как правило, в разветвленной гидросистеме это колебательное звено, в одиночных трубопроводах – апериодическое. Для общего случая положим передаточную функцию равной:

Т. к. колебательные процессы слабо выражены вследствие большой инерционности объекта, можно понизить порядок передаточной функции (2). Получим:

Параметры передаточной функции зависят от каждого конкретного случая, поэтому их получают методами идентификации.
На основании (1) и (3) запишем общую передаточную функцию объекта:

Анализируя функцию (4) видно, что она имеет четвертый порядок. Это означает, что регулятор должен иметь возможность отслеживать ошибку по ускорению, что не представляется возможным во встроенных в частотный преобразователь ПИД-законах управления. Кроме того, использование даже дифференциальной составляющей в трубопроводной системе может сильно ухудшить устойчивость из-за отработки кратковременных возмущений, связанных с отражением воды от стенок труб, изменением потребления на конечной точке и т. п. Таким образом, целесообразно использовать ПИ-регулятор с точки зрения обеспечения максимальной устойчивости, но в этом случае ухудшится время регулирования, но в данной системе оно не является критичным.
Передаточная функция ПИ-регулятора

Точный теоретический расчет параметров регулятора, при которых будет выполняться условие устойчивости и требования к заданным показателям качества, выполнить практически невозможно из-за специфики объекта. Тем не менее, существуют методики расчета приблизительных параметров регулятора для передаточных функций объектов до третьей степени. В случае с четвертым порядком функции (4) целесообразно поступить следующим образом: понизить порядок знаменателя, удалив слагаемое с наименьшей постоянной времени. Допустим, что после выполнения этой процедуры передаточная функция приняла вид:

Для передаточной функции вида (6) методом Никольса-Зиглера можно рассчитать следующие настройки:

Как правило, при данных настройках система бывает устойчивой, однако часто они используются лишь как стартовые настройки при пуске и наладке регулятора. Процесс наладки заключается в следующим – выставляются либо полученные настройки, либо значения, меньше их в 2–3 раза, и постепенно увеличиваются, при этом контролируется выходная величина объекта управления. Как только выход начинает сильно отклоняться от уставки – прекращается подбор параметров. Практика показывает, что для достижения наибольшего быстродействия постоянная времени интегратора должна превышать рассчитанную в 5–10 раз.
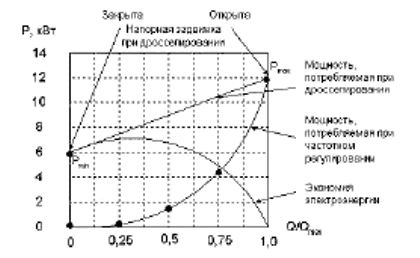
Рисунок 3 – Потребление мощности при различных способах регулирования скорости вращения насосов
Остановимся более детально на самой системе и принципе формирования уставки частоты для двигателя. В определенное время суток нагрузка на водоузел различна, т. е. объемы потребления воды также различны. Микроконтроллером рассчитывается частота питающего напряжения двигателя в соответствии с полученными экспериментально статическими коэффициентами усиления для насоса-магистрали и известным соотношением числа оборотов ротора от частоты питающего напряжения для обеспечения требуемого числа оборотов крыльчатки насоса и как следствие – требуемого расхода воды. Далее данное опорное значение частоты передается частотному преобразователю и осуществляется управление по замкнутому контуру.
Приведенные зависимости на рисунке 3 для некоторого электродвигателя показывает экономический эффект от использования частотного регулирования.
Также следует упомянуть о возможности комбинированного управления в случае если насосов более одного. В этом случае нет необходимости использовать отдельный частотный преобразователь для каждого насоса, а достаточно иметь только один преобразователь и коммутирующее устройство. Допустим, насосы имеют характеристики вида 1, а магистраль – характеристику вида 4 (рис. 4). Увеличение подачи и давления производится в следующем порядке. На начальном этапе в работу включается один насос с частотно-регулируемым электроприводом. Для обеспечения подачи Q1 его частота вращения увеличивается до значения ω1. Дальнейший рост подачи и давления возможен до величин Q3 и Р3 соответственно. Если необходимо обеспечить дальнейшее увеличение подачи, то происходит переключение питания электропривода первого насоса с выхода преобразователя частоты на сеть, а к выходу преобразователя частоты коммутируется электропривод второго насоса и частота вращения увеличивается до требуемого значения. Например, для обеспечения подачи и давления Q2' и Р2' соответственно частота вращения второго насоса должна быть увеличена до значения ω2’. Таким образом обеспечивается регулирование параметров насосной станции в области, заключенной между характеристиками 1 и 2. При необходимости дальнейшего увеличения подачи и давления до значений выше Q3' и Р3' питание электропривода второго насоса переключается с выхода преобразователя частоты на сеть и в работу вводится третий насос, управляемый частотно-регулируемым электроприводом. В этом случае регулирование происходит в области, заключенной между характеристиками 2 и 3.
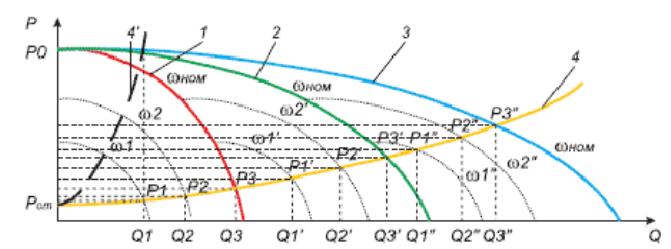
Рисунок 4 – Комбинированное регулирование режима работы подсистемы подкачки
При снижении подачи и давления коммутация и регулирование частоты вращения электроприводов насосов происходит в обратном порядке.
Рассмотренный способ регулирования режима работы насосной установки обеспечивает плавное и непрерывное изменение подачи и давления жидкости в широком диапазоне изменения значений регулируемых параметров от Q1 до Q3'' и характеристики сети от 4 до 4'.
Список использованной литературы
1. Башарин А. В., Новиков В. А., Соколовский Г. Г. Управление электроприводами: учебное пособие для
вузов – Л.: Энергоиздат. Ленингр. отд., 1982. – 392 с.
2. Лукас В. А. Теория автоматического управления: Учеб.для вузов – 2-е изд., перераб. и доп. – М.: Недра,
1990. – 416 с.