Авторы: А. С. Мартьянов.
При проектировании ветроэнергетических установок (ВЭУ) возникает задача автоматического регулирования мощности, вырабатываемой ВЭУ для обеспечения эффективной работы в широком диапазоне скоростей ветра. Как известно, в условиях переменчивой скорости ветра роторы ВЭУ характеризуются неустойчивостью по скорости вращения [1]. При нарушении баланса между аэродинамической мощностью ротора и электрической мощностью электрогенератора, скорость вращения либо увеличивается, либо уменьшается, отклоняясь от своего оптимального значения и снижая производительность ВЭУ. Нарушение баланса мощности вызывается неравномерностью нагрузки потребителя и случайными изменениями скорости ветра.
Для обеспечения эффективного регулирования ВЭУ может быть оснащена цифровой системой управления. Одной из основных задач системы управления является регулирование скорости вращения ротора с целью обеспечения максимальной производительности ВЭУ в условиях переменчивого ветра путём изменения отбираемой от электрогенератора мощности. Для поддержания баланса мощностей, требуемого в целях управления, необходимо правильно определять аэродинамическую мощность ротора, в зависимости от скорости ветра и скорости вращения. Этому способствует то обстоятельство, что аэродинамические характеристики ротора ВЭУ достаточно хорошо изучены и располагаемая аэродинамическая мощность ротора может быть с необходимой точностью определена по табличным зависимостям, хранящимся в памяти системы управления.
Зависимость аэродинамической мощности PА ротора ВЭУ от скорости вращения ω для различных скоростей ветра известна. Вращение ротора можно описать уравнением:
dE/dt = PA - PЭ,
где E –кинетическая энергия ротора;
t – время;
PЭ – мощность электрогенератора.
Ясно, что для устойчивого вращения ротора в районе максимальной мощности, то есть в районе скорости вращения ω0, необходимо выполнять условия:
PA > PЭ; при ω < ω0;
PA < PЭ; при ω > ω0.
Данные условия может обеспечить цифровая система управления. Используя измеряемые значения скорости ветра, скорости вращения ротора, токов и напряжений в цепях электрогенератора система управления вырабатывает команды, поступающие к регулятору мощности, который изменяет полную мощность электрогенератора.
Таким образом, в диапазоне ω < ω0;, устраняется возможность самопроизвольной остановки ротора. Это делается за счет ограничения нагрузки электрогенератора. В диапазоне скоростей вращения ω > ω0;, мощность РЭ может превышать мощность ротора РА. При этом недостаток аэродинамической мощности ротора восполняется за счет кинетической энергии вращения ротора Е, ротор тормозится и аэродинамическая мощность увеличивается.
Недостатком описываемого способа является необходимость наличия датчика скорости ветра (анемометра) для определения располагаемой мощности PA, что создает определенные сложности при конструировании ВЭУ, а также приводит к удорожанию всей системы. Для устранения этих недостатков и упрощения алгоритмов управления предлагается следующий способ регулирования, заключающийся в том, что дополнительно в систему управления заносится зависимость максимально возможной мощности РЭ от частоты вращения ротора &omega. Это приводит к ограничению области работы ротора в координатах скорость ветра – частота вращения ротора областью, где обеспечивается устойчивая работа ВЭУ.
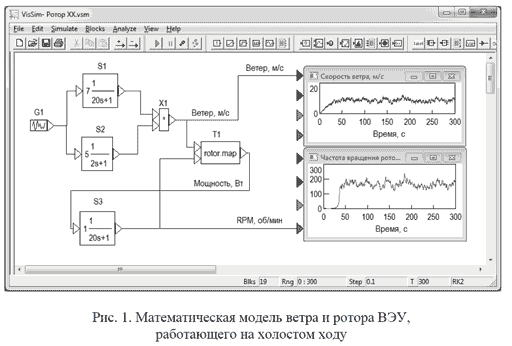
Для исследования поведения ротора в условиях изменяющегося ветра была построена программно-математическая модель ВЭУ. Модель реализована в программной среде визуального программирования VisSim [2] и имеет блочную структуру, показанную на рис. 1.
Программно-математическая модель ветра построена на генераторе случайных чисел G1, передаточных функциях S1, S2, умножителе X1, и представляет собой упрощенную модель, описанную в [3]. Зависимости мощности ротора в зависимости от скорости ветра и текущей частоты вращения [1], представлены табличным описанием, хранящимся в блоке Т1, а передаточная функция S3 учитывает влияние механических характеристик, таких как момент инерции ротора, трение. На рис. 1 видно, что предложенная математическая модель ветра достаточно близко описывает реальное поведение ветра, а поведение ротора на холостом ходу соответсвует характеристикам ротора.
Для моделирования системы управления в программно-математическую модель были добавлены регулятор Т2, который с помощью блоков Х2 и Х3 (рис. 2) имитирует отбор мощности от ротора ВЭУ в зависимости от частоты вращения ротора, при этом закон ограничения мощности задан табличным способом в блоке Т2.
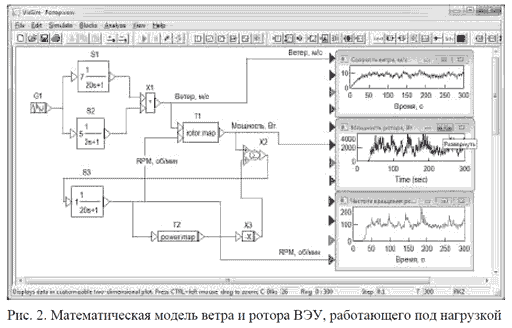
Из результатов моделирования видно, что предложенный способ регулирования обеспечивает достаточно эффективное управление мощностью ВЭУ, обеспечивая как раскрутку ротора ВЭУ в начале работы, так и следование изменениям скорости ветра, что должно обеспечить эффективную работу ВЭУ в условиях переменной скорости ветра.
Таким образом, результаты численного моделирования подтверждают работоспособность и эффективность предложенного алгоритма управления вращением ВЭУ. Данный алгоритм может применяться, если в качестве нагрузки используется постоянно подключенный накопитель энергии, способный воспринимать всю производимую мощность ВЭУ. В этом случае исключается работа вхолостую, когда ресурс установки вырабатывается без пользы, и исключаются простои ВЭУ при наличии ветра, уменьшая сроки окупаемости изделия.
1. Мартьянов А. С. О преобразовании энергии в ветроэнергетических установках малой мощности / А. С. Мартьянов, И. М. Кирпичникова // Наука ЮУрГУ: материалы 61-й науч. конф. Секция техн. наук. – Челябинск: Издательский центр ЮУрГУ, 2009. – Т. 2 – C. 304.
2. Дьяконов В. П. VisSim + Mathcad + MATHLAB. Визуальное математическое моделирование / В. П. Дьяконов. – М.: СОЛОН-Пресс, 2004, – C. 384.
3. Кирпичникова И. М. Моделирование на ЭВМ динамической составляющей скорости ветра в зависимости от времени / И. М. Кирпичникова, О. В. Матвеенко // Альтернативная энергетика и экология. – 2010. – № 1 (81). – С. 54–59.