
Реферат за темою випускної роботи
Зміст
- Вступ
- 1. Актуальність теми
- 2. Цілі та завдання дослідження
- 3. Аналіз об’єкта автоматизації
- 4. Проектування системи автоматичного керування
- 5. Програмне забезпечення
- Висновки
- Список використаної літератури
Вступ
Автоматизація з кожним днем набуває все більшу роль у виробничій діяльності та житті людського суспільства, в задоволенні його зростаючих потреб. В останні роки у зв’язку з помітним зменшенням природних ресурсів, тривожними глобальними змінами клімату та зростанням чисельності населення Землі роль автоматизації все більше посилюється, а сфери її застосування безперервно розширюються.
Сьогодні практично не існує технічних процесів, які обходяться без автоматики - починаючи від простих систем, використовуваних в побуті, та закінчуючи складними промисловими процесами виробництва [3, 5]. Багато технічних пристроїв, без яких сьогодні неможливо уявити собі комфортне та безпечне повсякденне життя, стали такими тільки завдяки використовуваної в них автоматиці.
1. Актуальність теми
На сьогоднішній день питання стабілізації фізично нестійких об’єктів є однією з найбільш частих проблем теорії автоматичного управління, з якою стикаються інженери цієї області. Тому виникає необхідність отримання багатого досвіду щодо вирішення подібних завдань для майбутніх інженерів. При цьому важливо отримання не тільки теоретичних знань й навичок роботи з математичними моделями, а в першу чергу практичних умінь й досвіду роботи з реальними фізичними об’єктами, фізичну природу яких неможливо повністю описати за допомогою моделі [4].
Паралельно з цим технічний прогрес рухається шляхом мініатюризації датчиків, виконавчих механізмів, зниження їх енерговитрат, вартості та підвищення універсальності, надійності і швидкодії мікросхем і мікропроцесорів. Це надає можливість створення об’єктів, які поєднують в собі всі апаратні засоби не тільки для формування керуючого впливу, але й для вимірювання фізичних величин зворотного зв’язку та реалізації складних систем управління. Можливість повної реалізації всіх цих функцій в середині одного об’єкта дозволяє зробити його автономним і компактним.
Цей фактор підштовхує інженерів до створення все більш простих механічно, але все більш складних за способом управління об’єктів. А це, в свою чергу, вимагає створення показових моделей, які допомагають в розумінні та вивченні способів стабілізації фізично нестійких об’єктів, відточуванні практичних навичок з проектування систем непрямого вимірювання фізичних величин.
Засоби та рішення автоматичного управління постійно вдосконалюються, тому показові моделі повинні рухатися в ногу з часом, щоб дати правильне уявлення про поточний стан проблеми автоматичного управління різними об’єктами.
2. Цілі та завдання дослідження.
Мета – створення лабораторної установки для вивчення способів стабілізації фізично нестійких об’єктів, отримання практичних навичок з проектування систем управління з використанням інтелектуальних датчиків.
Призначення – розробка апаратної частини платформи у вигляді перевернутого маятника, розробка алгоритмів визначення кута нахилу, балансування, переміщення та з’єднання з ПК і дистанційним пристроєм.
Основні завдання роботи:
- Аналіз існуючих систем стабілізації та динамічної рівноваги.
- Розробка математичної моделі об’єкта.
- Розробка функціональної та структурної схем об’єкта.
- Моделювання динамічних процесів в об’єкті.
- Аналіз існуючих методів визначення кута нахилу конструкції та обробки показань з датчиків.
- Синтез алгоритмів ідентифікації параметрів балансуючого робота (параметри двигуна, кут нахилу, положення в просторі).
- Проектування системи автоматичного керування з подальшим вибором компонентів.
- Створення програмного забезпечення для дистанційного керування.
- Розробка стендової моделі балансуючого робота.
3. Аналіз об’єкта автоматизації
Класична пересувна платформа, яку мають майже всі автомобілі та візки, має чотири колеса. Це забезпечує платформі баланс при русі та стійкість, але ця конструкція має ряд недоліків:
• велика кількість коліс призводить до збільшення габаритів платформи та кількості рухливих частин, що знижує надійність;
• неможливість встановлення окремого двигуна для кожного колеса;
• розташування коліс по кутах платформи призводить до необхідності встановлення допоміжних вузлів для передачі зусиль від двигуна до коліс (диференціал), а також для маневрування (рульовий важіль), що ускладнює структуру й управління платформою.
Перерахованих недоліків позбавлена конструкція платформи у вигляді перевернутого маятника. Цей тип платформи має наступний вигляд: на єдиній колісній осі розташовані тільки два колеса, при цьому вага платформи зосереджена над колісною віссю (рис. 3.1).
Наявність тільки двох коліс зменшує габарити й підвищує надійність, а роздільне управління кожним з них (за допомогою двох двигунів) робить платформу дуже маневреної. Вона може пересуватися, підтримуючи баланс, а також здатна виконувати розворот на місці.
Істотним недоліком є те, що така платформа є нестабільною - якщо двигуни вимкнути, то платформа неодмінно впаде, тому що центр маси платформи знаходиться дуже високо. Але цей недолік можна компенсувати завдяки автоматичній підтримці балансу. Задавши закон регулювання, є можливість виробляти керуючий вплив на двигуни постійного струму, які, в свою чергу, будуть тримати платформу в рівновазі, однак для цього потрібно вимірювати кут відхилення платформи від нормалі до поверхні.
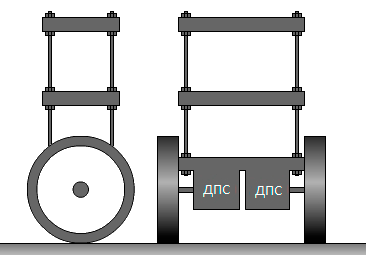
Рисунок 3.1 – Платформа у вигляді перевернутого маятника
Ідея підтримки балансу досить проста, тому що конструкція має єдину точку рівноваги, коли центр мас вантажу знаходиться безпосередньо над віссю обертання [1]. Якщо центр ваги конструкції відхиляється в сторону, то сила тяжіння частково передається через опору до землі, а інша її складова створює момент обертання конструкції, який прагне завалити конструкцію на бік. Щоб компенсувати цю силу, система повинна почати рух з прискоренням в сторону падіння. Сила F, яку створює прискорення, розкладається на силу, що діє в бік опори, і силу, яка створює зворотний момент обертання конструкції (рис. 3.2).
Для підтримки балансу необхідно виконання умови:
Але якщо розглядати тільки малі відхилення від стану рівноваги ( α→0 ), то завдяки лінеаризації можна отримати більш просту умову для рівноваги:
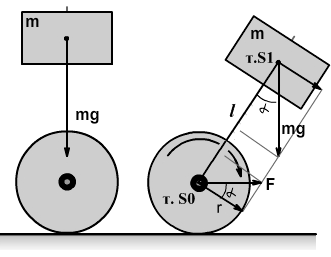
Рисунок 3.2 – Функціональна схема балансування
Умовні позначення:
M – маса колісної бази;
m – маса вантажу;
α – кут відхилення маятника від нормалі до земної поверхні;
т. S0 – центр мас колісної осі;
т. S1 – центр мас вантажу;
l – відстань між точками S0 та S1;
g – прискорення вільного падіння;
r – радіус колеса.
Також потрібно врахувати, що забезпечення постійного прискорення в реальній системі – дуже важке завдання і саме тому для підтримки балансу така система повинна не тільки компенсувати силу, яка завалює конструкцію, але й відновлювати вертикаль, тобто:
Умовний принцип підтримки рівноваги можна проілюструвати нижчеподаною анімацією.
Рисунок 3.3 – Принцип стабілізації об’єкта (анімація складається з 22 кадрів із затримкою в 100 мс між ними, кількість циклів повторення – 7)
4. Проектування системи автоматичного керування
Згiдно до [2, 7, 8], узагальнена структурна схема САУ балансуючим роботом представлена на малюнку нижче.
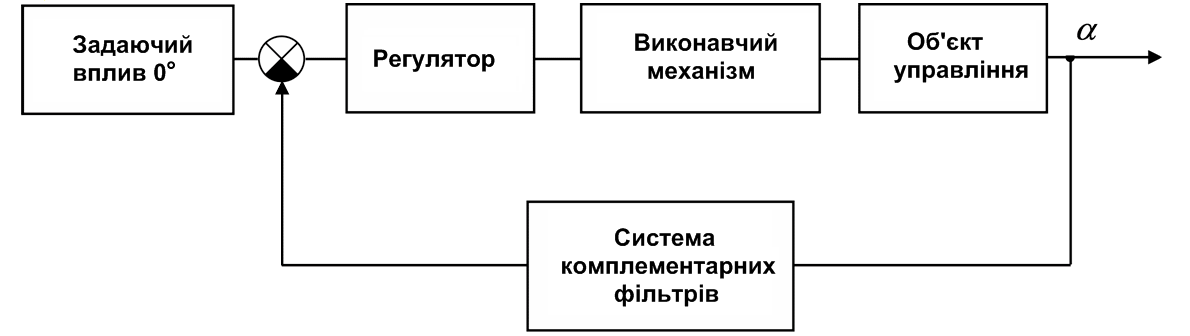
Рисунок 4.1 – Загальна структурна схема системи управління
Як об’єкт управління виступає конструкція перевернутого маятника (рухома платформа). Роль виконавчого механізму виконують два двигуна постійного струму. Для управління двигунами в системі потрібен драйвер двигунів. Завдання регулювання й обчислення керуючих впливів виконує мікроконтролер, а закон управління реалізується та задається програмно.
Виходом системи є кут відхилення від нормалі до поверхні, виміряний за допомогою мікроелектромеханічних систем (МЕМС-датчиків руху), які представляють собою об’єднання акселерометра та гіроскопа. Метою системи є утримання кута нахилу рівним нулю, або близьким до нуля. Функціональна схема представлена на рис. 4.2.
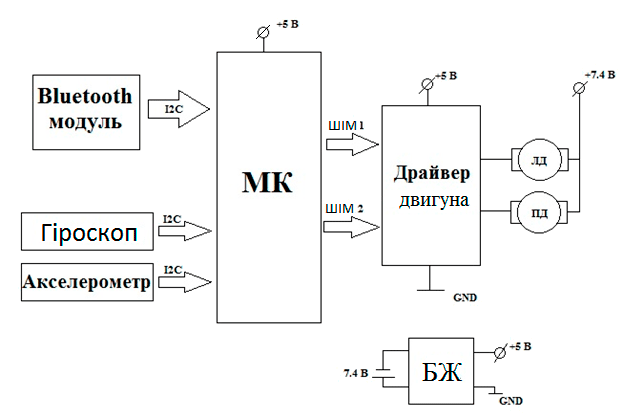
Рисунок 4.2 – Функціональна схема системи управління
Окремо хочеться відзначити про вибір мікроконтролера. На сьогоднішній день на ринку представлений дуже широкий вибір різних інтелектуальних пристроїв, які займаються обчисленнями в реальному часі. Дуже популярними серед споживачів є 8-бітові мікроконтролери сімейства AVR фірми Atmel. Вони дуже часто застосовуються для вирішення різних завдань в робототехніці.
Однак, технологічний прогрес рухається дуже швидко і 8-бітові мікроконтролери, незважаючи на простоту в їх використанні, потроху поступаються місцем більш продуктивним сімействам, які здатні виконувати в рази більше операцій в секунду і мають більше вбудованих інтерфейсів, внутрішніх модулів і навіть простіші в прототипированні ніж звичайний 8-бітний мікроконтролер AVR, такий як, наприклад, ATMega8.
Саме тому було прийнято рішення використовувати в якості обчислювального комплексу mbed мікроконтролер фірми NXP LPC1768. Це одноплатний мікроконтролер з необхідними засобами програмування на платі.
Рисунок 4.3 – Мікроконтролер mbed NXP LPC1768
Ця плата розроблена для швидкого проектування різних електронних пристроїв і роботів. Продуктивність цього мікроконтролера становить близько 100 MIPS. Мікроконтролер LPC1768 має ядро ARM Cortex-M3. Він може функціонувати і займатися обчисленням при частоті 100 МГц.
Основні характеристики мікроконтролера mbed NXP LPC1768:
- високопродуктивне ядро ARM Cortex-M3;
- частота функціонування 96 МГц;
- 32 Кб пам’яті RAM, 512 Кб FLASH-пам’яті;
- інтерфейси: Ethernet, USB, 2xSPI, 2xI2C, 3xUART, CAN;
- 6 каналів, здатних видавати ШІМ-сигнал;
- 6 каналів АЦП, 6 каналів ЦАП;
- 40-піновий DIP форм-фактор, розміри 54х26мм;
- живлення від USB або від зовнішнього джерела 4.5-9В;
- онлайн-компілятор, середовище розробки;
- вбудований drag 'n' drop Flash-програматор;
- вихід стабілізованої напруги 3.3В;
- повна програмна та технічна підтримка, безліч прикладів програм.
Схема підключення даного контролера представлена нижче.
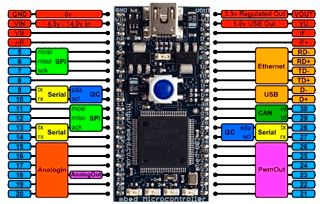
Рисунок 4.4 – Схема підключення контролера
Завдяки апаратній платформі mbed та багатому набору програмних компонентів (готові бібліотеки, коди програм для вирішення різних завдань, онлайн-середовище розробки разом з усім необхідним функціоналом) є можливість дуже швидко створювати програмне забезпечення для систем управління, «серцем» яких буде сам мікроконтролер mbed NXP LPC1768.
5. Програмне забезпечення
Алгоритм роботи програми представлений на блок-схемі нижче (рис. 5.1). Після включення живлення iнiцiалiзуються всi елементи САУ (двигуни, модуль Bluetooth, плата датчиків). Після цього, з файлу зчитуються коефіцієнти регулятора й інформація з гіроскопа та акселерометра. Далі йде перевірка - чи не занадто велике відхилення від нормалі. Якщо менше 150 або більше 200 градусів, то це означає, що робот падає, отже, йде перезавантаження контролера та вимикання двигунів. Інакше, йде перевірка на отримання даних через Bluetooth. Якщо дані передаються - то вони являються керуючими впливами для подальшого руху робота. Інакше, впливи формуються за кутом відхилення від нормалі для того, щоб стабілізувати становище конструкції. Після цього, робот починає рух відповідно з керуючим впливом і перераховуються значення регулятора.
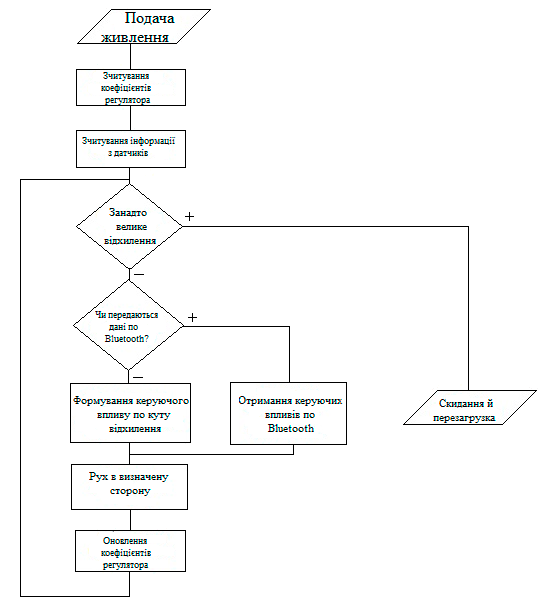
Рисунок 5.1 – Блок-схема алгоритму основної програми
Для дистанційного керування було прийнято рішення створити програму на операційній системі Android, яка використовує Bluetooth для підключення та передачі даних між пристроєм і САУ балансуючим роботом. Його інтерфейс представлений на рис. 5.2.
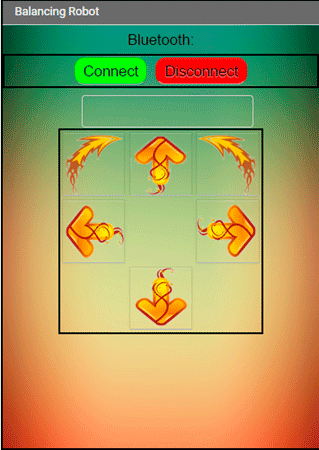
Рисунок 5.2 – Графічний інтерфейс програми для дистанційного керування
При натисканні Connect з випадаючого списку можна вибрати пристрій для підключення. Керуючий вплив передається за допомогою стрілок управління. Є можливість руху вперед/назад, розвороту за і проти годинникової стрілки (двигуни працюють в різних напрямках), повороту наліво і направо (один з двигунів не працює).
Висновки
В роботі проведено дослідження методів та алгоритмів ідентифікації параметрів [6] балансуючого робота. На першому етапі було проаналізовано об’єкт автоматизації, параметри якого треба ідентифікувати та для якого синтезувати САУ й вибрати регулятор. Розглянуто найбільш популярні рішення проблеми стабілізації, переміщення, ідентифікації та визначення кута нахилу об’єктів у вигляді перевернутого маятника.
Далі були обрані апаратні компоненти системи та розроблена принципова схема управління об’єктом. В останньому розділі повністю опрацьовано програмне забезпечення балансуючого робота, опрацьована логіка дистанційного керування і створено відповідну програму.
Дана робота є основою для створення стендової моделі робота.
На момент написання даного реферату магістерська робота не завершена. Остаточне завершення планується у червнi 2017 року. Повний текст роботи та матеріали по темі можуть бути отримані у автора або його керівника після зазначеної дати.
Список використаної літератури
- Капица П. Л. Динамическая устойчивость маятника при колеблющейся точке подвеса. Журнал экспериментальной и теоретической физики, т. 21, вып. 5, 1951. – с. 588–597.
- Певзнер Л. Д. Теория систем управления. – М.: Издательство МГТУ, 2002. – 469 с.
- Москаленко В. В. Электрический привод: Учеб. Пособие для студентов учреждений сред. проф. Образования. – М.: Мастерство; Высшая школа, 2001. – 368 с.
- Аничкин И. М. Применение нейронной сети для управления мотоциклом.
- Брандина Е. П. Электрические машины – СПб.: СЗТУ, 2004. – 152 с.
- Симою М. Определение коэффициентов передаточных функций линеаризованных звеньев систем регулирования. Автоматика и телемеханика, 1957. – 514–527 c.
- Льюнг Л. Идентификация систем. Теория для пользователя: М.: Наука, 1991. – 432 с.
- Дорф Р. Современные системы управления / Дорф Р., Бишоп Р; Пер. с англ. Копылова Б.И. – М.: Лаборатория Базовых Знаний, 2004. – 832 с.
